河海大学计算机与信息学院 江苏省南京市 211100
摘要:水土流失是我国主要的生态环境问题,其扩大和发展受区域土地覆被状况的影响。在以往监测方法中,图像判读和解译获得的是对地物的大致估计,会产生较大误差。单源高光谱又会因飞行高度等问题使动态监测能力较差。所以本文章阐述了高光谱遥感与水土流失的监测相结合的方法,并且引入了机载和星载高光谱遥感的多源监测,利用其高精度分析能力、光谱信息和空间几何信息,进行图像增强、融合处理和三维地形分析,突出目标区水土流失状况的影像标志,方便对水土流失情况进行严密监测。
关键词:星载高光谱遥感,机载高光谱遥感,水土流失监测
一、传统遥感在水土流失监测中的应用
利用RS与GIS快速监测水土流失,其研究思路就是利用数字高程模型(DEM)数据获取坡度信息,并将其转化为矢量, 然后对高分辨率的台湾福卫二号卫星影像原始数据和全色(黑白)分辨率2m、多光谱(彩色)分辨率8m卫片进行处理,经过一系列的计算机处理技术,包括几何精校正、正射纠正、图像增强、彩色融合、镶嵌拼接、信息增强、坐标转换等,对卫星图像进行加工、改造,以纠正由于太阳辐射、地球球面曲率、地形起伏、地球旋转、飞行器姿态等引起的误差,并增强图像的反差、增加图像的层次,提高图像的判读效果,在此基础上通过在影像中提取植被覆盖和土地利用类型等因子信息,最后在ArcGIS软件的支持下将各因子信息叠加,用于建立好的水土流失预测模型计算出区域水土流失量,来实现研究区水土流失快速调查与动态监测的目的[1]。
21世纪以来,水利部及其流域派出机构先后在长江主要支流、黄河多沙粗沙区重点支流以及部分国家级水土流失重点防治区组织开展了土壤侵蚀遥感监测。为保证成果质量,提高其科学性、准确性和时效性,必须开展监测与评价方法研究,秉着基于现状、着眼未来的原则,构建科学、快捷的动态监测评价体系[2]。
二、机载高光谱与星载高光谱具体解决方案
为亟待解决的水土流失的高光谱图像高性能和在轨处理提供了实现途径:数字信号处理器(Digital Signal Processor,DSP)、现场可编程门阵列(Field-Programmable Gate Array,FPGA),图形处理器(Graphic Processing Unit,GPU)等,都被尝试应用于机载或星载的高光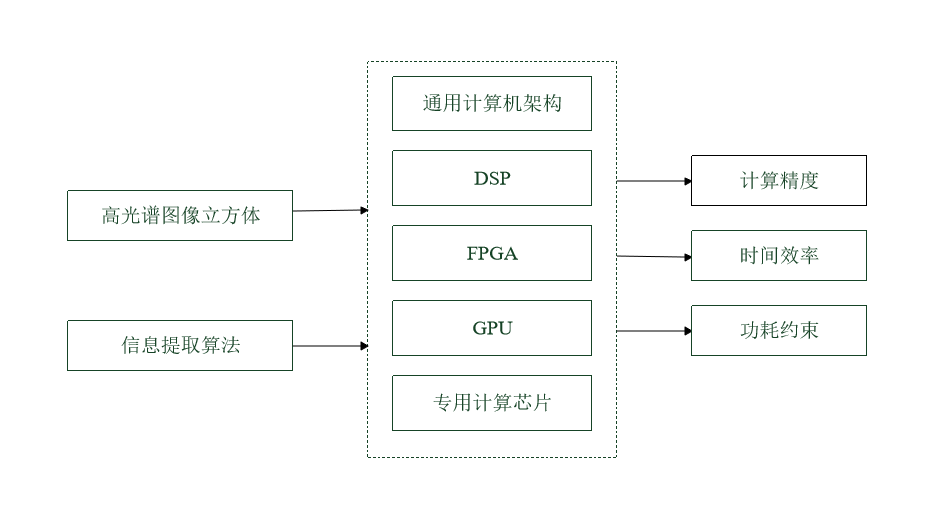
谱图像数据处理和信息提取。
图1-高光谱图像处理
基于DSP的处理方法
DSP是一种为实现各种数字信号处理算法而专门开发的专用处理器。Chai等人(2000)基于高并行、低存储,单指令多数据处理器阵列,利用多片数字信号处理器DSP解决高光谱数据在轨实时处理,满足实时处理和存储要求。Castillo等人(2014)利用多核DSP 实现正交子空间投影(OSP)算法,同时实现空间重建算法(ISRA)获取丰度信息,通过对比试验认为多核DSP在编程难度、处理能力以及能量消耗等多条件约束下表现出色。Zhang等人(2012a)针对高光谱图像分别在空间维和光谱维的相关特征,首先在光谱维进行目标特征谱段选择,然后在空间维采样进行背景协方差矩阵估计,构建基于空间—光谱维信息提取策略的CEM优化算法,核心思想是利用数据在光谱和空间的相关性进行样本协方差矩阵估计,并基于DSP架构形成目标探测硬件板卡,结果表明不但在目标探测率上比表现出色,还提高算法的计算效率,达到实时目标探测。[3]
基于FPGA的处理方法
FPGA作为专用集成电路领域中的一种半定制电路而出现,既解决了专用定制电路的不足,又克服了原有可编程器件门电路有限的缺点。FPGA能够应用于高光谱遥感图像的实时处理源于它灵活的设计方式和强大的面积-速度互换原则。基于现场可编程门阵列FPGA,Yang等人(2015)提出了以流水式局部背景统计方法(SBS)实现对目标探测算法的改进,在保证各算法探测效果的同时极大地降低计算难度,提高算法运行效率。而且,以FPGA高性能器件实现对算法的硬件加速,对于算法中共用的存储与计算单元,采用模块化设计的方式使其可以被系统反复调用,在保证系统实时性能的同时节省大量硬件资源。[4]以单片FPGA实现多种探测模式下的集成应用,在同一片FPGA上集成了CEM和RXD算法,分别用于目标探测和异常探测,通过控制中心发送的指令,FPGA可以在轨更换工作模式,灵活的在两种不同的工作模式之间进行选择。实验结果表明,结合FPGA的软硬件优化设计,经选取的大量目标探测算法得以严格满足在轨高光谱图像实时处理要求,实现目标匹配探测和异常探测的双模式处理。
 形处理器GPU的大规模数据级并行处理在高光谱数据高性能计算领域发展迅猛。Agathos等人(2014)基于多GPU实现最小单形体体积算法,算法使用形态学的思想,并从像元集合的外部形成单形体后不断收缩进行端元提取。
形处理器GPU的大规模数据级并行处理在高光谱数据高性能计算领域发展迅猛。Agathos等人(2014)基于多GPU实现最小单形体体积算法,算法使用形态学的思想,并从像元集合的外部形成单形体后不断收缩进行端元提取。
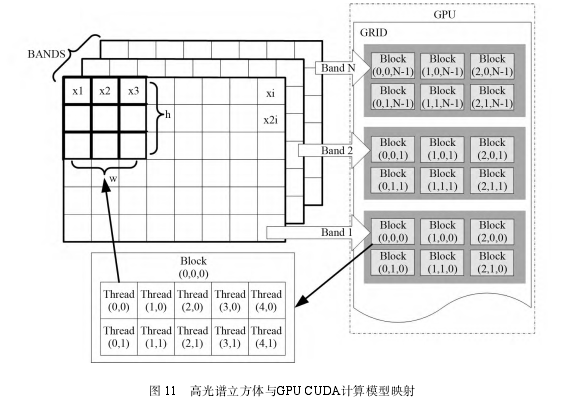
图2-高光谱立方体与GPU CUDA计算模型
基于GPU和CUDA计算架构,Wu等人(2014,2015a)将高光谱图像预处理的辐射校正、数据降维的最大噪声分数变换(MNF)、图像分类的空间—光谱维马尔可夫置信传播算法(MRF-LBP)、目标异常探测算法等复杂的数据处理和信息提取算法进行并行实现,形成基于GPU的高光谱图像数据级并行计算全链路方法。算法步骤中的矩阵乘法、矩阵求逆、矩阵特征值计算采用CULA库函数并行实现。NVIDIA GPU编程模型主要支持两个数学库函数,一个是CUBLAS库函数,包括矢量—矢量,矩阵—矢量,矩阵—矩阵这3个基本线性运算;另一个是EM Photonics的CULA库函数,作为CUBLAS的补充,除包含CUBLAS库中的函数外,还包含最小二乘解算器(约束和无约束)、特征值/特征向量求解器(一般对称)、奇异值分解以及矩阵求逆等复杂线性运算。CULA库是在CPU/GPU混合环境中执行加速的线性代数库函数,通过CULA能够提高复杂计算的速度。整个算法的计算步骤分为两部分:在CPU上执行的Host端(负责算法流程控制以及串行计算),在GPU上执行的Device端(负责图像数据并行计算)。实验结果表明,在保证高光谱图像数据处理和信息提取算法精度的同时,基于GPU的数据级并行方法能获得数十倍的计算加速比,可达到近实时处理的标准。
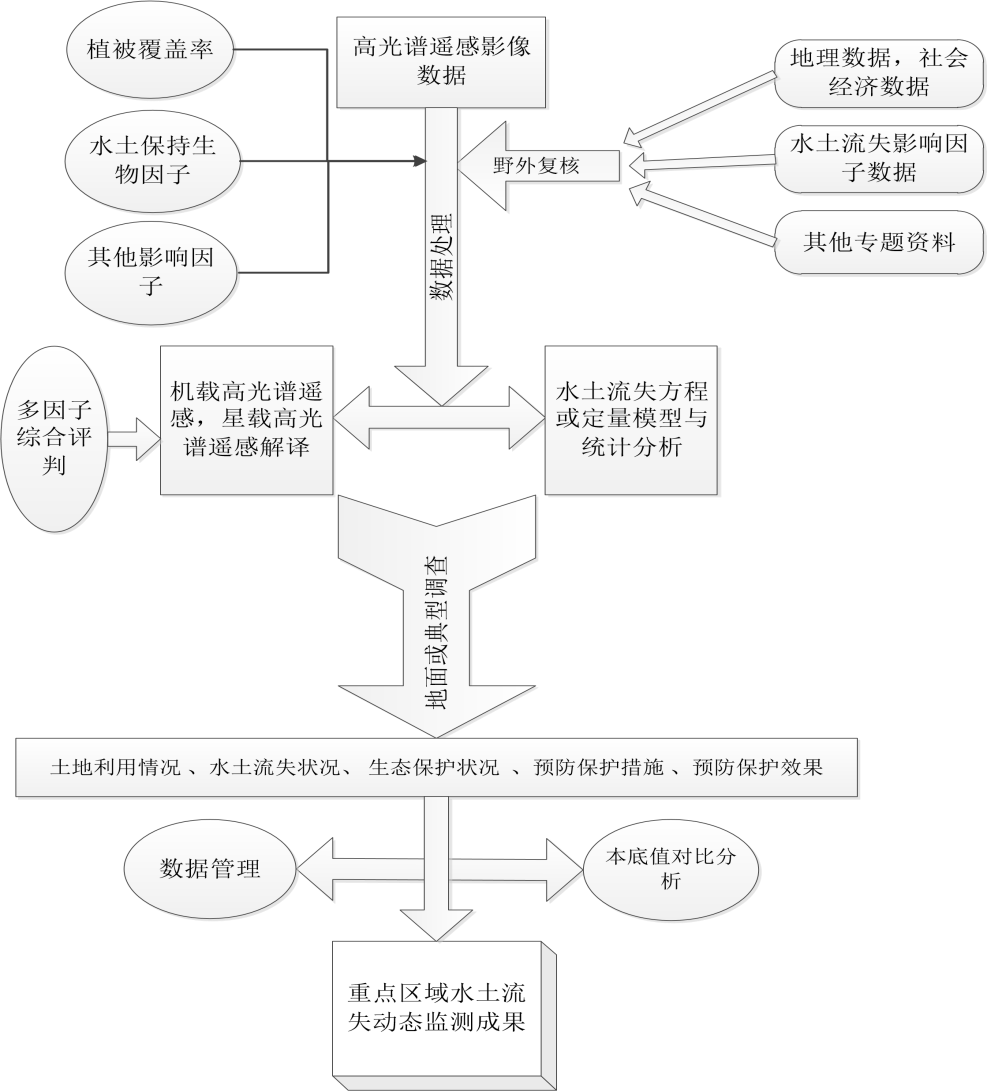
图3-机载高光谱遥感与星载高光谱遥感工作原理
参考文献:
[1] 赵辉,黎家作,李晶晶, 中国水土流失动态监测与评价的现状与对策[J]. 水利部水土保持监测中心,水利部淮河水利委员会,黄河水利委员会黄河上中游管理局,2016.10.26
[2] 郭索彦,李智广.我国水土保持监测的发展历程与成就[J].中国水土保持科学,2009,7(5):19-24.
[3] 李智广,符素华,刘宝元.我国水力侵蚀抽样调查方法[J].中国水土保持科学,2012,10(1):77—81.
[4]Mountrakis,G;Im,J;Ogole,C.Support vector machines in remote sensing :A review [J].ISPRS Journal of Photogrammetry and Remote Sensing 2010.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号