窑街煤电集团甘肃金凯机械制造有限责任公司 甘肃兰州 730080
摘要:针对一种液压支架四连杆机构的进行分析设计,完成一款满足现场使用的液压支架结构。首先利用经验分析的方法确定方案,然后利用传统方法进行机构设计,再利用Simulink 进行机构的运动精度验证和优化校正,最终实现对机构参数的影响因素探明和达到设计效果。
关键词:液压支架;四连杆机构;设计分析
液压支架是一个多连杆机构,整个液压支架连杆机构的运动取决于顶梁、底座和前、后连杆组成的四连杆机构。四连杆机构作为液压支架机构组成,不仅具有约束位移的作用,还应有提高支架的稳定性和其他功能,所以对支架系统简化而出的四连杆机构作分析和设计是十分必要的。
液压支架的简化图,如下图1示。连杆机构有且仅有一个自由度,可以通过立柱和均衡千斤顶约束这个仅存的自由度,让连杆机构实现定位支撑和稳定机架的功能。
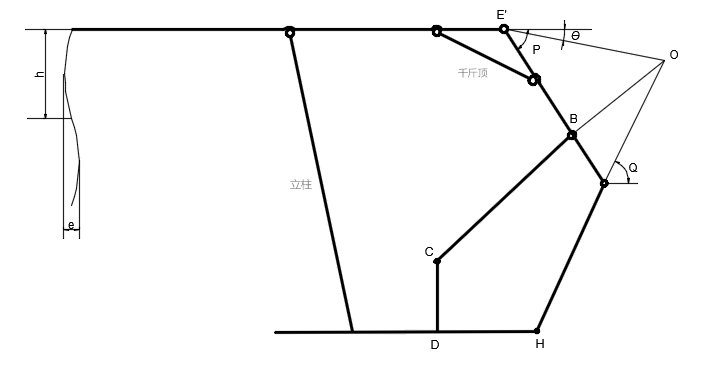
图1 液压支架简化图
承载的过程中需要顶梁保持水平,所以顶梁的主要承载防护能力将和E点的位置相关联。在设计液压支架的时候需要重点研究去掉顶梁、立柱和均衡千斤顶后的四连杆机构,该机构由底座、前后连杆和掩护梁组成。
依照四连杆机构的运行轨迹经验,在保证顶梁水平的同时,E点和顶梁前点的轨迹类似于一条S形曲线,使用中如果这条S型曲线的水平误差e越大,越不利于支撑护顶。所以需要合理的设计机构参数,控制顶梁前端的水平误差e 。
另外,四连杆机构不仅具有定位功能,同时兼备支撑防护和放顶煤的功能,所以需要对机构各杆件的行程做出一定的约束,这也是液压支架四连杆设计的主要约束条件。
(1)支架在HMAX与HMIN之间升降时,为了保证可靠的支护范围,顶部梁前端与煤壁间的距离e变化应该小于0.1m,最优取值为0.07m左右。
(2)支架在HMAX与HMIN,对顶梁与掩护梁之间的夹角P以及后部连杆与底端平面的夹角Q要求如下:
支架在HMAX时,为防止连杆机构发生摩檫力条件下的自锁行为需要对掩护梁和后连杆的垂向夹角做出一定的约束,按照工程设计经验一般要求PMAX=52~62°,QMAX=75~85°。
支架处于HMIN时,要想使矸石顺利滑落,则有tanP>W,W为钢梁表面和矸石之间的摩擦系数,取W=0.4,即:tanP=0.4,求得P=21.8°;P的取值影响支撑效果和溜煤效果,这里取P=25°。充足的落煤区域对落煤有利,Q可取25°~30°。
(3)铰点E’和几何中心O连线和水平方向之间的夹角是θ,因影响分力的大小,要求tanθ≤0.35。
在四连杆机构设计中,后连杆直接影响放煤口所在的尾部空间,其水平最小夹角为下点时,掩护梁在此位置坡度最小,最不利于顶煤的滑落,所以此处的坡度应该具备下限。掩护梁和后连杆之间的夹角过大会导致机构自锁问题,相对应最大支撑高度位置,为连杆水平夹角的上限。所以,掩护梁和后连杆之间相互制约,应该被首先确定。然后采用前连杆在机构中长度不变的方式,假设前连杆和掩护梁的铰接位置,利用几何原理求出前连杆和底座的铰接位置。
在校核过程中,利用数值计算软件MATLAB通过编程来研究随着各参数变化下顶梁运动轨迹的变化规律。
3.1 掩护梁总长度和后连杆长度确定
要计算出掩护梁的长度和后连杆的长度,可以采用解析的方法,如简图2。

图2 掩护梁与后连杆简图
图中,L—掩护梁铰接长度,m;
L1—后连杆长度,m;
L2—E’点垂直H-H线交点距后连杆铰点距离,m;
h1—支架在最高位置时的高度,h1=3.6m;
h2—支架在最低位置时的高度,h2=2.3m;
从几何关系可以列出:
![]() ()
()
将上式联立可得:
![]() ()
()
鉴于四连杆机构运动特点:可以使![]()
得:![]()
支架在HMAX时:
![]() ()
()
则掩护梁的长:
![]() ()
()
得:![]()
后部连杆长为:
![]()
3.2 确定前连杆的长度和铰接位置
具体作图步骤如下:(1)确定后连杆下铰点O点的位置,考虑底座和后连杆的铰接位置具有一定的高度,在此忽略。(2)过O点作与水平线H-H直线。(3)以O点做圆心,以L1为半径作弧。(4)过点A作与H-H所在直线相交、角度为60°的倾斜线。以O点为圆心,做一个圆弧,半径为L2。(5)过E’点作与H-H线平行的直线F-F。(6)现在把A作为圆心,0.1L为半径画弧。(7)此时如果将支架上升的过程看作为动态的,顶端梁的端头可以看作是一个直线的运动。过E’作F-F的相交垂直线E’-E”,当支架处于H
MIN时,顶端梁和掩护梁之间的铰接连接点E”,以两铰点为端点做的直线的中点E”,可以作为支架下降到中位时顶梁与掩护梁之间的相连的绞点。(8)现在分别把点O和E”作为圆心画弧,把L和L1作为半径作两个弧,和点A’相交,掩护梁与后连杆的铰点位于支架将至中间某高度时的位置。通过同样的办法也能计算出支架在HMIN的时候掩护钢梁和后部连杆的绞接点位置A”。(9)连接E”与A”、E”与A’,现在以A”和A’作为两个圆的型心,把0.25L为半径作两个弧,有了两个相交的点B”和B’,则B、B’、B”分别是支架在HMAX 、HMID 和HMIN的时候前连杆与掩护梁的相铰接的交点。(10)连接OA’、OA”。(11)做BB’和BB”的垂平线,两线的交点C即是前连杆与底座连接点,BC就是前部连杆的长度。(12)过C点作H-H的垂线相交的线,铰点D的位置,如此,便可得出构建的四连杆机构的所有部件的位值。
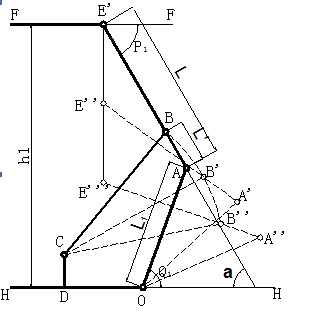
图3 四连杆几何法图解
通过快速图解并计算得到:前连杆BC=1.73m,CD=0.40m,OD=0.82m。
3.3顶梁前端运动精度验证
对于连杆机构的姿态解算问题,已经有成熟的思路可以参考,主要依靠几何原理进行姿态和空间位置的计算[1]。在初步通过传统做法快速得到四连杆机构的参数后,需要进一步对顶梁前端的垂向运动轨迹的线性精度进行验证。在四连杆机构中有且仅有一个自由度,在各参数确定的条件下,各杆件之间的相对位置是可以被唯一确定的,可以将四连杆机构划分为三个三角形,然后可以利用三角函数关系,逐步确定每个杆件的空间位置。假设三角形三边为a、b、c以及对应得角为∠A、∠B、∠C,那么就有:
 ()
()
如下图4所示,利用传统设计方法求得各值为:OA=400mm,OB=820mm,AD=1730mm,BC=1440mm,CD=470mm,CE=2510mm。可以通过∠CBF作为出发点逐步利用正余弦定理来研究顶梁前端得运动轨迹。具体确定顺序为:
![]()
面对该复杂得问题,利用MATLAB软件中强大的Simulink仿真模块进行建模,完成仿真数据的可视化。
 图4 顶梁运动轨迹校核几何原理和Simulink仿真模型
图4 顶梁运动轨迹校核几何原理和Simulink仿真模型
仿真模块中主要子模块包括利用正余弦定理进行求边或求角度的模块,以及一个利用三角形信息求解顶梁位置的模块。由于Simulink中建模标注的局限性,图中单个大写字母代表四连杆机构的铰接点,图中两个连续大写字母的组合代表四连杆机构三角形中的边,三个连续大写字母代表依次用线段连接这三个点行程的内角。
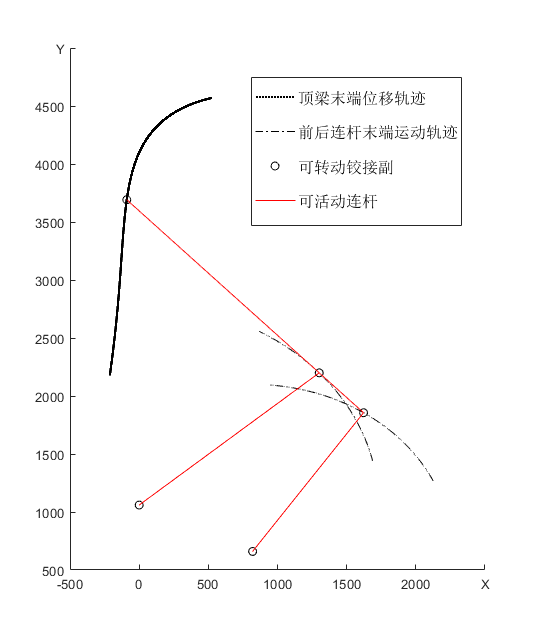
 图5 传统图解法的设计效果验证
图5 传统图解法的设计效果验证
然后利用斜坡激励信号替换∠CBF为输入,弧度设置起点可以求解不同时刻的条件下的E点坐标x(t)和y(t),利用MATLAB内置绘图指令plot进行数据可视化,关联参数t ,绘制得到以下的运动轨迹图如5所示。图中黑色线条为顶梁的运动轨迹,红色线条代表前后连杆和掩护梁,黑色虚线为前后连杆的运行轨迹。
可以发现,通过图解法设计的四连杆机构不能控制调高过程中的水平偏差,其偏差大于250mm,不满足设计要求,所以需要进一步对设计参数进行调整,完成校正设计。在这之前,需要对各参数对顶梁调高过程中的铰点位置偏差进行研究。
通过观察可以发现,造成这种偏差的主要原因是因为轨线的倾斜角度太大,所以在此设想是否可以通过改变底架对应连杆AB的倾斜角度∠ABO,来使设计达到预订的要求,但是同时不能忽视其他因素的影响,所以需要选取以下的参数进行系统的研究,分别是底架连杆的倾斜角∠ABO、底架连杆长度AB、前连杆长度AD、后连杆长度BC、掩护梁铰接长度CD和掩护梁总长CE。
(1)底座对应连杆斜度因素[2]
在不改变其他参数的条件下,计算得到了底座斜度对调高精度的影响,即对双扭线的影响。依次向右的底架斜度的弧度∠ABO为[0.3,0.31,0.32,......0.5],发现斜度为0.39-0.41rad的底座斜度,最有利与调高过程中水平方向的精度控制,利用该参数作为项目最终设计。在采取该参数后通过对四连杆机构对于地面的升降,可以有效的满足各种设计约束。
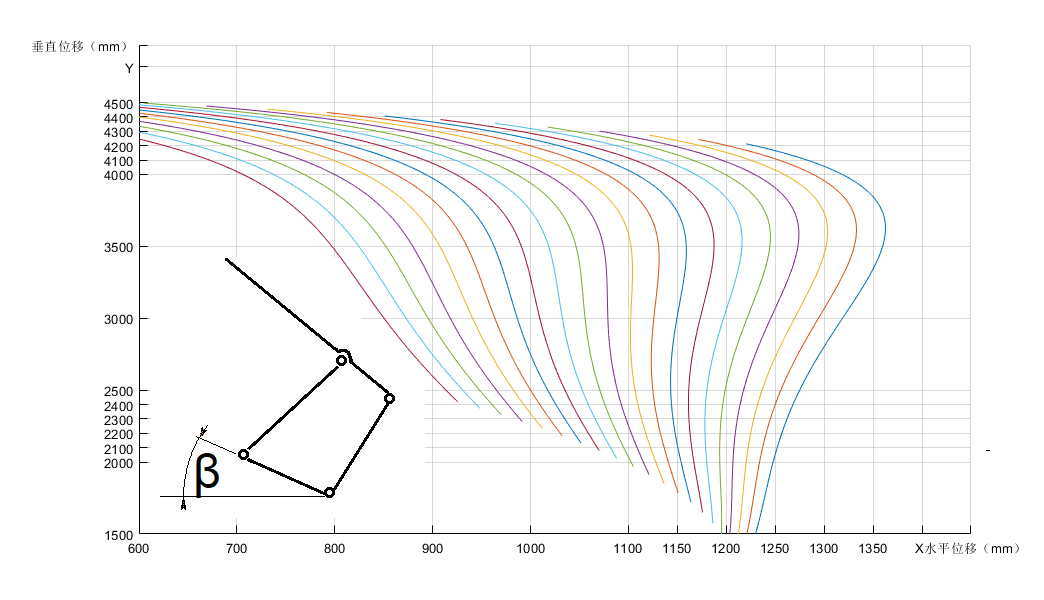
图6底架斜度对双扭线轨迹的影响
(依次向右的底架斜度的弧度β为[0.3,0.31,0.32,......0.5])
(2)掩护梁总长度对双扭线的影响
从图7中可以看出,随着掩护梁的长度增加,在一定的范围内,双扭线的线性度和圆度会越来越好,通过简单的数学分析可知,这是由于四连杆机构的作用使得掩护梁的回转中心的变动引起的。
如果将回转中心的位置考虑为一个与连杆角度有关的误差,此时掩护梁的运动将看作为固定半径随着有误差的中心回转问题,但是由于四连杆机构的约束,回转中心的绝对误差是确定的[
3]。所以随着杆长的增加,掩护梁的总长和误差之间的比值将会越来越小,体现为大半径下轨迹的圆度越来越好,相当于线性度越来越好。

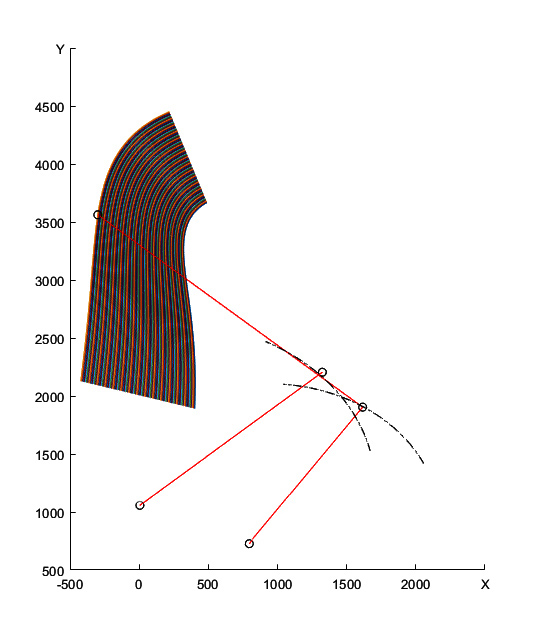
图7 掩护梁总长度对双扭线的影响
(3)掩护梁对应连杆长度对顶梁运行轨迹的影响
图8中红色代表连杆,彩色表示端头运行轨迹,从图中可以看出,随着掩护梁的长度增加,在一定的范围内,双扭线的线性度和圆度会越来越好,通过简单的数学分析可知,这是由于四连杆机构的作用使得掩护梁的回转中心变动引起的。如果将回转中心的位置考虑为一个与连杆角度有关的误差,此时的掩护梁的运动将看作是固定的半径随着有误差的中心回转问题,但是由于四连杆机构的约束,回转中心的绝对误差是确定的。所以随着杆长的增加,掩护梁的总长和误差之间的比值将会越来越小,体现为大半径下轨迹的圆度越来越好,相当于线性度越来越好。
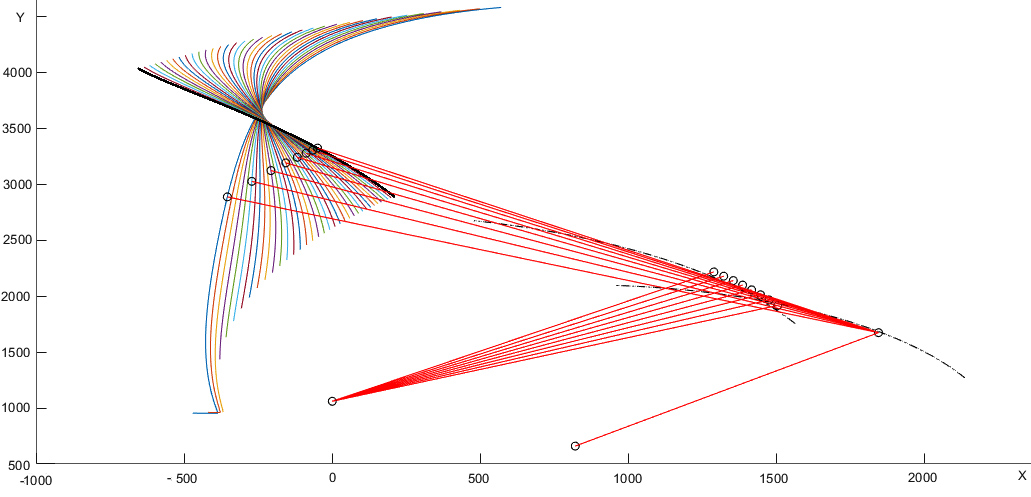
图8 掩护梁对应连杆长度对顶梁运行轨迹的影响
通过上图发现,掩护梁对应的连杆越长,其运动曲线越平滑,当设计轨迹太平缓的时候,可以通过缩小对应连杆的比例来优化设计。该因素的影响等效于底架底架对应连杆的长度,都是通过减小或者增加掩护梁运动中心的范围来影响最终运动轨迹。
通过仿真分析得出以下结论,在正四边形机构液压支架的设计中,可以快速地通过图解法、解析法等方法确定机构比例长度。如果在运动精度不满足设计要求的前提下,可以通过尝试调节底架位置、掩护梁长度[4]、前连杆长度、后连杆长度等方法来使设计满足要求。
在理论上,可以通过求出一个精确解来满足设计要求,这是完全符合一个数学问题和理论问题的答案的,但是这绝对不符合工程问题,机械加工需要考虑测量精度及加工精度等问题,所以可以采用10mm作为工程加工的基本单位,最终通过对结果的比较。将预设前后连杆铰接点间距由原来0.5m调整为0.47m,将前连杆和后连杆高度差由0.4m调整为0.42m,水平相距由0.82m调整为0.8m,改变底座的倾斜角度,完全可以将顶梁的水平运动精度约束在70mm以下。
本文主要对液压支架连杆几何特性进行介绍,然后对液压支架连杆机构应该具备的条件进行分析。在此基础上利用传统的解析法和图解法进行四连杆机构参数的快速确定,确定掩护梁总长2.51m,后连杆长度1.44,预设前后连杆铰接点间距0.5m,前连杆长度1.73m,和后连杆高度差0.4m,水平相距0.82m。
利用四连杆机构的几何特性在MATLAB中建立Simulink仿真模块进行顶梁前端轨迹的检查,发现顶梁运动精度不能符合设计要求。然后研究了底座对应连杆长度,掩护梁总长度和掩护梁对应连杆长度对顶梁轨迹的影响规律。依据底架的倾斜角度和掩护梁对应变化规律对原始设计方法得到的数据进行校正,最终确定液压支架的四连杆参数。预设前后连杆铰接点间距由原来0.5m调整为0.47m,前连杆和后连杆高度差由0.4m调整为0.42m,水平相距由0.82m调整为0.8m。最终,满足了四联杆架构设计,并将顶梁前点的水平运动精度约束在70mm以下。
1[] 林福严,苗长青.支撑掩护式液压支架运动位姿解算[J].煤炭科学技术, 2011,39(04):9 7-100.
2[] Cheng Jushan.A calculating method of stability for double—telescopic props of hydraulic supports.J Shandong Univ Sci Technol, 11 (2) (1992), pp. 39-43.
3[] 李提建.液压支架四连杆机构运动轨迹误差分析[J].矿山机械,2019,47(08):1-4.
4[] 丁绍南.掩护式支架和支撑掩护式支架中后连杆与掩护梁长度比值的探讨[J].阜新矿业学院学报,1987(02):95-98.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号