中车青岛四方机车车辆股份有限公司 技术中心 山东青岛 266111
摘要:目前越来越多的轨道交通车辆使用调整PWM占空比的方式实现对列车牵引力和制动力大小的控制。而PWM信号较容易收到车辆线缆长度和布线路径的干扰,导致PMW波形占空比发生变化,直接导致车辆不能准确地施加牵引力和制动力,影响列车的牵引制动的准确性。本论文通过在原始PWM控制电路基础上增加稳压二极管方式创造性提出了一种简单新型的列车级PWM信号控制电路,本电路可以较容易的解决PWM信号占空比变化的问题,本方案已经在实际车辆上应用并取得了较好的效果,具有一定的实用性和推广价值。
关键字:PWM信号;占空比;稳压二极管
一、引言
随着现在社会的快速发展,科技的不断创新,城市轨道交通车辆技术得到了快速的发展,越来越多的城市开始运营全自动无人驾驶列车,为了提高车辆的可靠性和安全性,全自动无人驾驶列车的控制方式采用网络和硬线同步控制。而硬线控车就是通过调整PWM占空比实现对列车牵引力和制动力大小的控制。而PWM信号较容易收到车辆线缆长度和布线路径的干扰,受到干扰的PWM信号不再是标准的脉冲波,而是不规则的波形。波形的不规则直接会导致PMW波形占空比发生变化,则牵引变流器和制动控制器收到的占空比跟实际PWM发生器发出的占空比就会出现偏差,直接导致车辆不能准确地施加牵引力和制动力,影响列车的牵引制动的准确性。目前行业中应用的PWM发生器性能各不相同,控制电路也不同,因此很多PWM发生器无法做到输出的PWM脉冲波完全不受车辆布线环境的干扰,基于此本文开始了从车辆侧矫正PWM脉冲波形工作的研究。
本论文通过在原始PWM控制电路基础上增加稳压二极管方式创造性提出了一种简单新型的PWM信号在车辆上的控制电路,可以较容易的解决PWM信号占空比变化的问题,矫正PWM波形,本方案已经在实际车辆上应用并取得了较好的效果,具有一定的实用性和推广价值。
二、车辆侧PWM控制电路的研究
(一)、常规车辆侧PWM控制电路
常规的PWM控制电路由三部分组成,PWM信号发生器、PWM硬线线路以及PWM信号控制设备(一般车辆上指牵引逆变器和制动控制器),如图1所示。

图1 PWM控制电路
PWM技术是脉宽调制技[1],应用在车辆控制电路上的PWM技术用来反映车辆牵引制动控级位的的变化,即PWM波形不同的占空比对应不同的牵引制动控制级位,一般PWM波形占空比的10%-90%对应0%-100%的牵引或制动力。一个脉冲周期内高电平的时间与脉冲周期的比值就是PWM占空比。即,
(1)

其中tg 是一个脉冲周期内高电平的时间,T是一个脉冲周期。
PWM发生器发出的脉冲信号如果抗干扰能力强,不受线路影响,则PWM信号控制设备会收到与PWM发生器发出的一样的标准脉冲波,则占空比也一样,这样PWM信号控制设备收到的脉冲占空比跟PWM发生器发出的脉冲占空比就是一样的,信号不会畸变。如图2所示。

图2 标准PWM脉冲波形
但是在实际电路应用中,很多PWM发生器输出端没有较好的抗干扰能力,导致PWM脉冲波形在通过线路传输过程中受到干扰,则PWM信号控制设备收到的PWM脉冲波发生变化,就不再是标准的脉冲波,如图3所示。
图3 受干扰后PWM脉冲波形
从上图可以看出,PWM信号经过线路传输后波形发生变化,波形在脉冲波的下降沿出现延时下降的情况,导致波形不再是标准的脉冲波。选取一个脉冲分析,在脉冲的下降沿,电压并没有立即从高电平将为0,而是缓慢变化,这就导致电压越小脉冲的占空比越大,PWM信号控制设备实际收到的PWM占空比就会比PWM发生器发出的占空比要大,至于占空比大出多少,主要看PWM信号控制设备设置的高低电平转换电压的大小,转换电压越低收到的占空比越大,一般如果高电平电压是DC110V,则高低电平转换电压是DC50V。
(二)、基于稳压二极管的车辆侧PWM控制电路
从车辆电路角度考虑,由于线路路径复杂多变,直接消除线路引起的干扰基本上不可能,并且比较困难。如果将脉冲波输入PWM信号控制设备的电压波形整体减少一定的幅值,则可以将波形畸变严重的部分直接屏蔽掉。基于此设想本文提出了一种从车辆侧矫正PWM脉冲波形的方法。
本文在原始PWM控制电路基础上通过增加稳压二极管方式创造性提出了一种简单新型的PWM信号在车辆上的控制电路,可以较容易的解决PWM信号占空比变化的问题,矫正PWM波形,控制电路见图4。
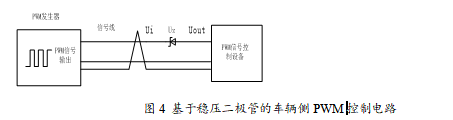
图4 基于稳压二极管的车辆侧PWM控制电路
如上图所示,在PWM发生器和PWM信号控制设备之间增加一个反向稳压二极管,当PWM脉冲波形经过二极管时,如果脉冲电压小于,则脉冲无法通过,当脉冲电压大于时,稳压二极管被反向击穿,由于稳压二极管自身特性,内部电阻随着电流增大而减小[2],因此稳压二极管会分走固定数值的电压,这样通过稳压二极管后的脉冲电压就会减少,即
(2)

其中是PWM脉冲其发出的脉冲电压,是稳压二极管的稳定电压,是经过稳压二极管后的PWM脉冲电压。由图3可以知道PWM脉冲波形延时变化的部分主要集中在低电平部分,因此的脉冲波形更接近于标准的脉冲波。
三、参数选取及试验验证
在改进的车辆侧PWM控制电路中,参数的选取比较重要,它直接决定了PWM脉冲波是否能够较好的被矫正,现举例进行说明。考虑到蓄电池保护电压,一般车辆控制电压范围为DC80V-DC110V,则PWM脉冲的高电平电压范围也是DC80V-DC110V,假设PWM信号控制设备判断低电平的转换电压是DC50V,则的最大值如下:
(3)
即最大不能超过30V,则的范围是DC0V-DC30V。如果=30V,当PWM脉冲高电平为80V时,则
(4)
由于PWM信号控制设备判断低电平的转换电压是DC50V,因此当为50V时,刚好处于高低电平转换的临界值。因此如果大于30V,则必定小于50V,则PWM信号控制设备收到的脉冲信号高电平小于50V,因此PWM信号控制设备计算的脉冲占空比会一直为0.这样PWM信号控制设备就收不到PWM脉冲占空比的变化。因此的范围是DC0V-DC30V,由于PWM脉冲波越往高电压端,波形受干扰越小。本文取为28V进行试验,采用改进后的PWM控制电路波形见图5.

图5 改进后的PWM输出波形
图5为增加稳压二极管前后波形对比图,黄色为稳压二极管输出波形,绿色为稳压二极管输入波形,图中可以看出黄色波形比绿色波形整体幅值下降了28V,并且黄色波形形状更接近于标准的PWM脉冲波,黄色波形在低压段下降沿斜率明显增大,因此在50V以上的PWM波形基本恢复正常。
四、结论
为解决因PWM脉冲波畸变,导致PWM信号控制设备计算的脉冲占空比与PWM发生器发出的脉冲占空比不同的问题。本文在常规车辆侧PWM控制电路基础上增加了稳压二极管,通过稳压二极管固定分压的方式实现了对PWM脉冲波占空比矫正的目的,从而最大程度的还原PWM脉冲波占空比,目前已通过现车试验验证了本方案的可行性。
参考文献
[1]刘凤君.现代逆变技术及应用[M].北京:电子工业出版社,2006(9):137.
[2]华成英,童诗白.模拟电子技术基础[M].北京:高等教育出版社,2006(1):24-25
作者简介
赵孔仓(1988-),男,山东菏泽人,硕士研究生,主要从事轨道交通车辆电气集成设计。

3

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



