中车青岛四方机车车辆股份有限公司 山东青岛 266000
摘要:针对工业机器人对于外界作业环境接触力感知的需求,本文选取六维力传感器并对其特性和使用方法进行了分析,设计了传感器、机器人和作业工件之间的连接方式,基于Matlab开发了传感器的数据采集与显示系统,为工业机器人引入力觉控制提供基础。
关键词:六维力传感器;工业机器人;仿真
1 引言
近年来,我国制造业产业结构转型升级、劳动力成本持续增长及劳动力结构性短缺,“机器换人”日益成为热点,其主要现象就是智能化工业机器人的投入使用[1]。
传统的工业机器人大部分是基于位置的运动控制,对于抛光、打磨等需要机器人与作业工件接触的任务,需要引入力觉控制系统[2]。力控制的基础是机器人能够获得准确的外界力信息,主要方法是使用力传感器,根据力传感器的安装位置又分为关节力传感器、末端力传感器和底座力传感器。传感器的种类较多、安装方式多样,且传统工业机器人控制器封闭无法处理力信息,这都限制了工业机器人在打磨抛光等对接触力有要求的任务上的应用。
本文选取六维力传感器一次测得三维力和三维力矩信息,在工业机器人本体无法改动和控制器封闭的条件下,设计传感器安装方式,开发传感器数据采集与显示系统,实现受力信息的在线可视化显示。
2 力感知
机器人对于外力感知主要包括力传感器方法和电流环反馈方法。电流环反馈方法需要复杂的机器人动力学建模与辨识,由于机器人关节摩擦力模型难以精确建模,因此并不实用。从简单性和可扩展性方面考虑,采用机器人腕部力传感器的方法。
2.1 多轴力传感器
为了准确的得到外部力信息,本文采用图1所示的静电电容型六轴传感器,可以同时输出 、
、 、
、 三个轴上力和力矩的大小信息。其主要原理就是传感器内部的敏感部件是一块静电电容,在外界力的作用下使得电容两极之间的距离产生变化,从而使得输出电压发生变化[4]。
三个轴上力和力矩的大小信息。其主要原理就是传感器内部的敏感部件是一块静电电容,在外界力的作用下使得电容两极之间的距离产生变化,从而使得输出电压发生变化[4]。
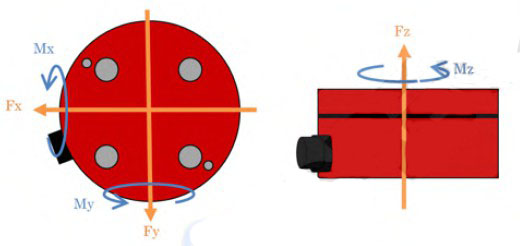
图1 六维力传感器
由于传感器本身搭载了MCU,与传统的力觉传感器相比不需要进行补正环节,经他轴灵敏度校正和内部温度传感器温度校正后准确输出检测值,主要参数如表1所示。
表1 六维传感器参数
单位 | 参数 | 规格 |
力额定负载 | N | ±200 |
力矩额定负载 | Nm | ±4 |
零点输出 | LSB | 1638.250 |
输入输出 | - | RS-422 |
最大工作电流 | mA | 200 |
2.2 力传感器的安装
一般的工业机器人并没有预留传感器的安装位置[5],因此本文设计了图2所示的安装方式。
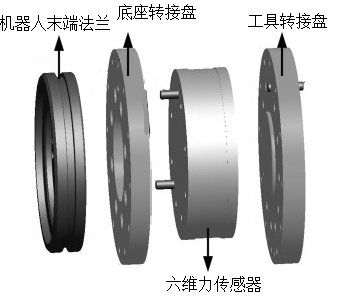
图2 传感器的安装方式
将特定加工的底座转接盘通过螺母固定在机器人自身的六轴末端位置,利用位置配合螺母实现方向定位。
使用六角扳手将传感器自身所搭载的拉铆螺母固定在有预留位置的底座转接盘上,同理利用工具转接盘将末端工具和六维力传感器完成刚性连接。
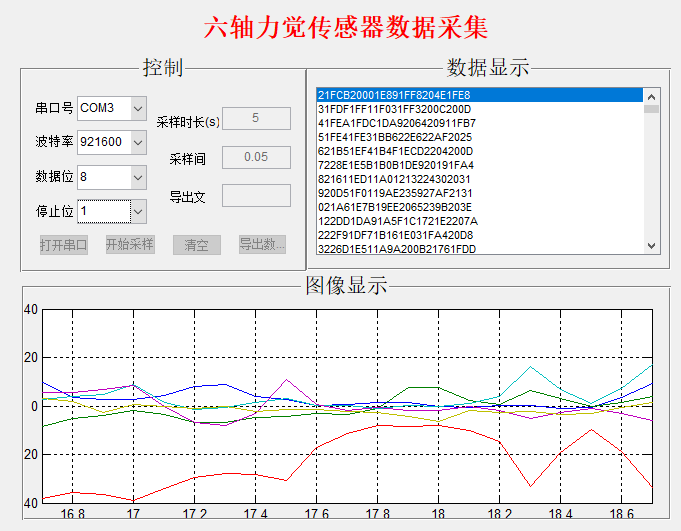
3 数据采集与显示
六轴传感器根据输入命令“R”或“S”来输出各轴的检测力和力矩。输出的数值范围在0-16383之间,当传感器末端没有负荷时输出的初始值即为零点输出值,当传感器末端检测到力信息变化时,输出共占27个字节的字符串形式。
所使用六维力传感器的默认通信为RS-422,而Matlab具有强大的串口处理功能,整个数据采集可视化程序在Matlab环境中实现。
s = serial('COM3');%定义串口号
set(s,'BaudRate',921600);%设置波特率
set(s,'timeout',1);%一次读写的最大完成时间
set(s,'InputBufferSize',1024);%输入缓冲区大小
set(s,'Parity','none');%设置校验位
set(s,'DataBits',8);%设置数据位
set(s,'StopBits',1); %设置停止位
set(s, 'Terminator', 'LF');%设置终止符为LF
将每次采集的结果存入一个6×n的矩阵中,并且以Excel文档的形式进行保存。
利用Matlab编写设计图形用户界面(Graphical User Interface,简称 GUI)作为上位机,以达到操作简便、数据可视的目的。
图3 数据实采集与显示
设计的 GUI界面主要包括控制区、数据显示区和图像显示区三大部分,实现外界环境力信息数据的在线处理。
4 结论
本文根据机器人对于外界环境力测量感知的需求,选取了六维力传感器,并对传感器的特性和使用方法进行了分析,设计了传感器、机器人和作业工件之间的连接方式,利用Matlab开发了传感器的数据采集与显示系统,为传统工业机器人的二次升级开发提供基础。
参考文献
赵杰.我国工业机器人发展现状与面临的挑战[J]. 航空制造技术, 2012(12):19-22.
王志军,王凯,刘宣佑.六维力传感器解耦综述[J]. 机械工程与自动化, 2018, 000(002):220-221.
黄玲涛,王彬,倪水,杨劲松,倪涛.基于力传感器重力补偿的机器人柔顺控制研究[J].农业机械学报,2020,51(03):386-393.
韩康,陈立恒,李行,夏明一,吴清文.高灵敏度大量程六维力传感器设计[J].仪器仪表学报,2019,40(09):61-69.
张立建, 胡瑞钦, 易旺民. 基于六维力传感器的工业机器人末端负载受力感知研究[J]. 自动化学报, 2017, 043(003):439-447.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号