湖南汽车工程职业学院,株洲 412000
摘 要:一种物流用无人机接受装置,包括底壳体、升降平台、左右对称设置的半环形夹持机构以及盖板,所述底壳体截面为U形状,底壳体的内侧中部分别设置有两个凸台,所述半环形夹持机构通过设置于其底部的卡槽卡合于凸台上并能够沿凸台长度方向左右移动,所述底壳体内还设置有一步进电机,步进电机输出轴端连接有一丝杆,所述升降平台侧面通过丝杆滑块与丝杆传动连接,所述盖板铰接连接于底壳体的顶部且通过一大扭力电机控制其转动,本设计的有益之处在于:可以实现盖板的自动打开,半环形夹持机构也可以自动打开,且升降平台可以自主升降,无人机落入升降平台后进行充电,无人机从进入装置直到收纳于其内部均可以智能控制。
关键词: 物流用;无人机;接受装置
1、 研究背景
现目前快递员收发快递都是人工完成的,其作业效率低,缺少一个智能化的无人工作装置,无人机应用于快递行业将是一个趋势,然而无人机在使用时,需要具有一个专门用于收纳存储无人机的装置,方便无人机使用。
为了克服现有技术不足,现提出一种物流用无人机接受装置,其可以自动对无人机进行自动收纳保存,并且可以对无人机进行充电。
结构设计
一种物流用无人机接受装置,包括底壳体、升降平台、左右对称设置的半环形夹持机构以及盖板,所述底壳体截面为U形状,底壳体的内侧中部分别设置有两个凸台,所述半环形夹持机构通过设置于其底部的卡槽卡合于凸台上并能够沿凸台长度方向左右移动,所述底壳体内还设置有一步进电机,步进电机输出轴端连接有一丝杆,所述升降平台侧面通过丝杆滑块与丝杆传动连接,所述盖板铰接连接于底壳体的顶部且通过一大扭力电机控制其转动。
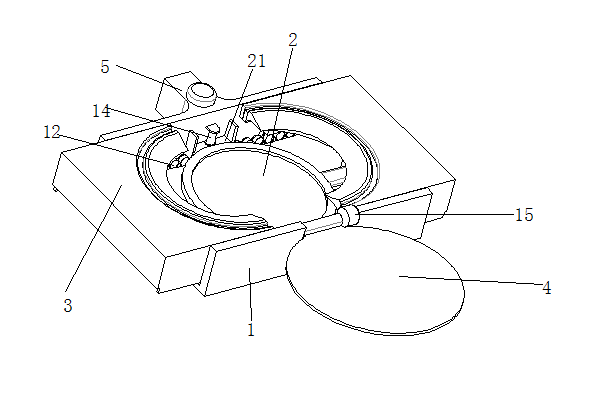
图1
1-底壳体;2-升降平台;3-半环形夹持机构;4-盖板;5-电气控制盒;11-凸台;12-无动力滚轮组;13-步进电机;14-丝杆;15-大扭力电机;21-丝杆滑块;31-卡槽;32-橡胶轮;33-行走电机。
图2
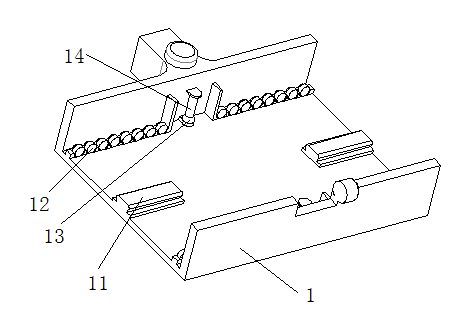
作为一种改进,所述卡槽端部设置有一通过行走电机控制的橡胶轮。
作为进一步改进,所述底壳体的内部两侧设置有无动力滚轮组,所述半环形夹持机构两侧与无动力滚轮组接触。
作为进一步改进,所述盖板上设置有无线充电装置。
作为进一步改进,所述底壳体的外侧面设置有电气控制盒,所述电气控制盒内设置与行走电机、大扭力电机以及步进电机连接控制的控制芯片。
结构原理
工作原理及使用流程:其在具体使用时,当无人机需要进入该收纳存储装置时,无人机给电气控制盒5发出信号,位于电气控制盒5内的控制芯片首先控制大扭力电机15转动,盖板4绕其铰接点转动打开,行走电机33控制橡胶轮32转动,橡胶轮32在凸台11上滚动,由于橡胶轮32具有较大的摩擦力,因而橡胶轮32可以带动半环形夹持机构3在凸台11上向两侧移动,两个半环形加持机构3向两侧移动呈打开状态,接着步进电机13转动,丝杆14带动位于升降平台2侧面的丝杆滑块21实现升降平台2的自动升起,无人机可以顺利的进入到升降平台2上,位于升降平台2上的无线充电装置可以实现给无人机的无线充电,然后步进电机13、行走电机33以及大扭力电机15依次反转,整个收纳存储装置进行关闭,实现无人机的收纳存储。
结论
与现有技术相比,本研究的有益效果是: 本设计提到的一种物流用无人机接受装置,其可以实现无人机收纳充电的智能控制,无人机可以自动进入底壳体内,并通过升降平台实现自动进入,并可以给无人机实现无线充电,使得无人机在使用时更加方便。
[1]刘珏,张恩宇,漆骏骞,程伯晗.基于北斗与ADS-B技术的无人机监视管理系统设计[J].科技创新与应用,2020(15):37-39.
[2]刘刚,裴红蕾.复合形引导蜂群寻优的无人机航迹多目标规划[J].机械设计与制造,2020(04):253-257.
[3]李永山.警用无人机主道路口混合交通流监测系统设计[J].电子设计工程,2020,28(07):104-107+112.
[4]王宏娥.翻转课堂在高职英语教学中的实践与反思[J].潍坊工程职业学院学报,2020,33(02):99-104.
[5]苏宝塍.广州天海翔航空:领跑中国无人机研发 助推制造强国梦实现[J].中国高新科技,2020(03):89.
[6]黄小毛,张垒,TANG Lie,唐灿,李小霞,贺小伟.复杂边界田块旋翼无人机自主作业路径规划[J].农业机械学报,2020,51(03):34-42.
[7]李方正.无人机及图像处理技术在油气田生产中的应用研究[J].价值工程,2019,38(36):249-250.
[8]崔恺,曾国奇,林伟,全权.一种基于图论的机场空域无人机流量控制方法[J].北京航空航天大学学报,2020,46(05):978-987.
[9]王湛,王江东,杨宏伟.民用轻小型无人机系统检测认证研究[J].质量与认证,2019(12):52-54.
[10]胡月,丁萌,姜欣言,曹云峰,禹科,张艳琳.一种面向有人/无人直升机协同打击的地面目标任务分配方法[J].航空科学技术,2019,30(10):64-69.
作者简介:兰新武(1967-):男,籍贯:湖南株洲,汉,学历:本科 ,职称:教授,研究方向:汽车运用技术、新能源汽车
基金课题: 2017年度湖南省自然科学基金项目(2017JJ5034);湖南省教育厅资助科研项目(项目编号:17C0812);湖南汽车工程职业学院科学研究项目(课题编号:HQZYKYB01)
1

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



