1.中国电子科技集团公司第四十五研究所 北京 100176
摘要:针对电子元器件封测设备对晶圆识别与定位功能的兼容性需求,设计一套基于视觉伺服的晶圆自适应识别与定位共性平台,该平台机器视觉与运动控制在结构上融合在一起。基于平台开展基于视觉伺服的晶圆自适应识别与定位技术研究,形成共性技术支撑。
关键词:晶圆图像;识别与定位;共性平台;机器视觉;运动控制;
部分电子元器件的生产具有小批量、多品种和高可靠性等特点,这对封测设备的适应性、兼容性和灵活性提出了更高的要求。由于各类型电子元器件的制造工艺不同,其晶圆识别与定位所需的图形标识及其表面颜色和边缘轮廓等差异很大[1]。为此,加工不同类型和批次的晶圆时,需要手动重新配置、调整封测设备的晶圆识别与定位系统,并且要进行多次迭代的工艺试验才能最终确定合适的设备硬件配备和软件参数。这都耗费了大量的生产制造时间,严重影响了制造周期,而且每批次的设备配置不确定性也会一定程度上影响元器件品质。
因此,开展应用于电子专用封测设备的基于视觉伺服的晶圆自适应识别与定位技术研究。基于视觉伺服的晶圆自适应识别与定位技术涉及机器视觉、运动控制等技术的集成应用。其中,机器视觉涉及相机、镜头、光源和图像处理算法软件等单元产品,运动控制涉及运动控制器、伺服控制器、伺服电机等单元产品[2]。对于基于视觉伺服的晶圆识别与定位,国内外电子专用封测设备制造企业都是提出整体解决方案,对单元技术和产品进行集成。虽然国内外封测设备都有相对成熟的晶圆识别与定位工艺功能,但都未研发基于视觉伺服的晶圆自适应识别与定位技术,没有搭建自适应共性平台。
技术方案
面向晶圆自适应识别与定位的视觉伺服系统框图如图1所示。该系统使机器视觉与运动控制在结构上融合在一起,在功能上相互作用,将识别的图形标识的空间位置作为运动控制的位置检测与反馈环节,构成基于位置反馈的闭环控制系统,使系统具有鲁棒性。
不同于现有的晶圆识别与定位方法,本文采用多次识别与定位的策略,具体流程如图2所示。通过基于区域相关的算法,快速粗识别得到晶圆图形标识的实际位置,通过视觉反馈计算位置偏差。驱动电机使运动平台移动偏差距离和偏差角度,再通过基于特征的精识别和视觉反馈得到晶圆图形标识的位置误差,误差小于阈值时认为晶圆定位完成。如果误差超过阈值,则计算晶圆的定位补偿值,由运动控制系统对偏差进行补偿。重复上述过程,直到定位结束。基于特征的精确识别算法的参数是可以自适应调整的。
在晶圆定位过程中,平台由于快速和高加速度的运动,会产生跟踪误差,该误差由于存在不确定性而难以实现静态补偿,为此在晶圆进给运动中,实时检测与动态补偿定位误差。
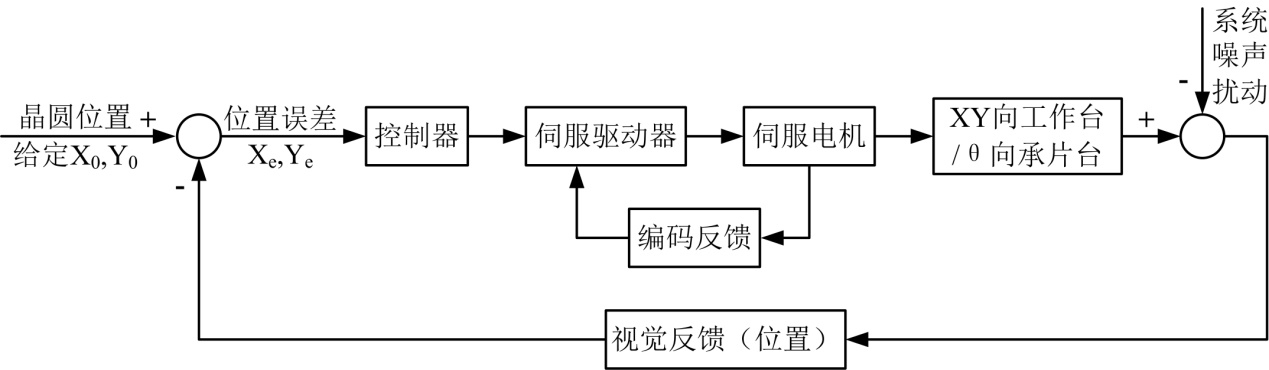
图1视觉伺服系统框图
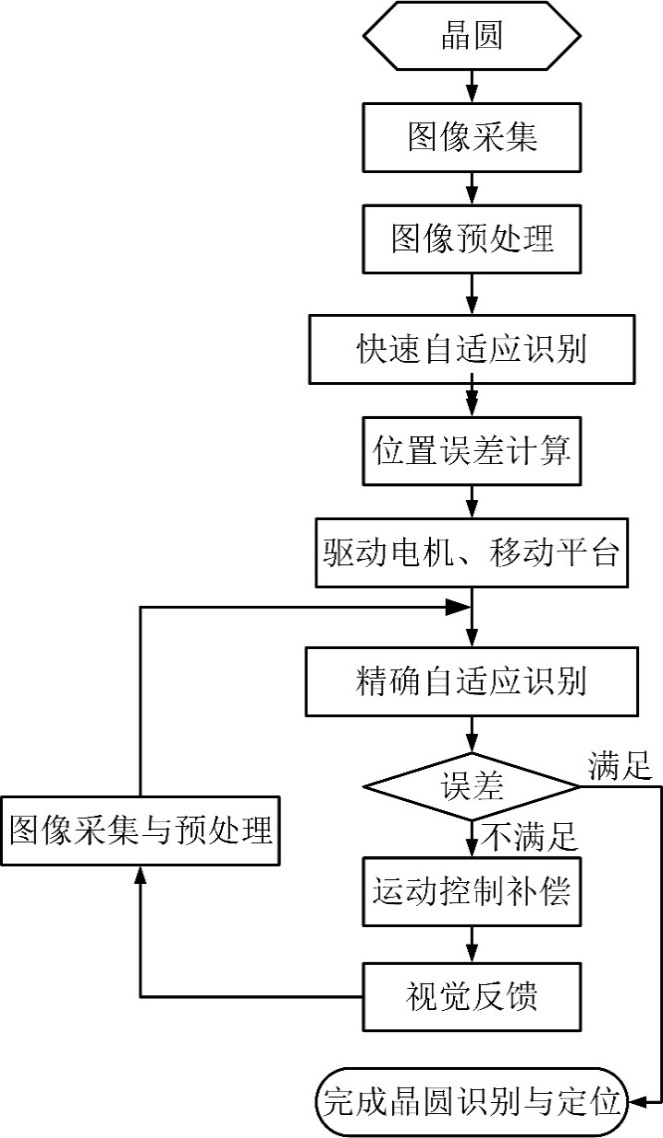
图2 晶圆自适应识别与定位流程图
共性平台
为开展研究,需要搭建共性平台。共性平台由机架、大理石平台、运动平台系统、机器视觉系统和电控系统组成。运动平台系统由XY向直线运动工作台、θ向旋转承片台和Z向调焦机构组成。机器视觉系统由相机、镜头、光源和图像处理算法软件组成。运动平台系统设计为开放式的,能够方便进行不同规格相机、镜头和光源的更换,并能承载4-6英寸晶圆。
2.1 机架和大理石平台
机架的功能是承载大理石平台、电控箱、工控机等。有移动和固定两种方式,保证稳定性和减震性。大理石平台的功能是承载运动平台系统。平台及立柱采用大理石材料。与机架连接处采用黑色橡胶隔垫,起到缓冲减震作用。
2.2 运动平台系统
(1)XY向直线运动工作台
XY向直线运动工作台采用十字叠型结构,线性电机驱动、精密直线导轨导向,配合高分辨率光栅尺闭环控制,实现晶圆在二维方向的直线进给运动。驱动部分密封防尘。两轴方向均选用无铁芯直线电机做执行单元,开放式光栅尺做位置反馈。光栅尺信号连接到驱动器构成速度环控制,同时光栅尺信号反馈到控制卡构成位置环控制,这种控制方式保证运动平台的精度及运行的平稳性。需选用精密导轨导向保证运动的直线度。工作台应达到以下主要指标:有效行程180mm×180mm,定位精度误差±2um,最高运动速度300mm/s。
(2)θ向旋转承片台
θ向旋转承片台安装在XY向直线运动工作台之上,用于晶圆旋转定位。其主要由旋转电机和承片台组成。选用直驱电机驱动承片台做360。旋转运动[3]。定位精度20"。旋转电机选用中空结构,可用于在工作台底部设置成像系统。中心孔径越大,可观测到的晶圆范围越大,越有利于晶圆对位。同时,承片台可选用金属材料或光学玻璃,采用真空吸附方式固定晶圆。玻璃承片台适用于安装背光源或底部成像系统。
(3)Z向调焦机构
Z向调焦机构采用精密细分的伺服电机,驱动滚珠丝杠,实现镜头的精密调焦。Z向调焦机构采用开放式设计,配置多组安装位置,适用于多种规格的相机、镜头、和光源的安装。Z向电动调焦行程20mm,定位精度±3um。
2.3机器视觉系统
(1)相机
可根据封测工艺的实际需求选择使用CCD或CMOS面阵成像芯片的相机。面阵相机的感光元形状是方形的,靶面尺寸有1/3",1/2",2/3"等,检测范围是一个矩形。需要综合考虑成本、性能的因素,以及产品的适应性和可继承性,可选用USB、千兆网等接口的相机。
(2)光学镜头
选择镜头需要考虑的主要参数有景深、视野范围、像面尺寸、放大倍率、焦距、工作距离、分辨率以及外形尺寸。对于晶圆的识别与定位,最常用的是定倍远心镜头,可满足大部分识别需要。定倍镜头尺寸小,工作距离和结构可以灵活设计,成本低[4]。如果要识别的特征尺寸范围较大,可以选择变倍显微镜头。不同倍率下的分辨率也不同,倍率改变后必须重新校正像素比。为实现晶圆的正面对准和背面加工,还需要配置底部对准镜头。
(3)光源
稳定均匀的光源照明是获得高质量图像采集效果的重要保障。合适的光源配置,能使图像中的晶圆图形标识信息与背景信息得到最佳分离,提高信噪比,利于后续图像处理。光源可分为正面照明光源和背面照明光源。正面照明用于检测物体表面特征;背面照明用于检测物体轮廓或通透物体的纯净度。
LED光源有多种颜色可选,包括红、绿、蓝、白、红外、紫外等,需根据晶圆的材质和表面特征,选用合适的光源颜色。多色光源的出现为视觉方案的选型提供了便利,可在不更换光源的情况下,程控切换光源颜色。
(4)图像处理算法软件
基于图像处理算法软件开发共性平台的图像处理算法。常用算法软件有德国MVtec的Halcon,加拿大Matrox的Mil,美国Cognex的VisionPro和CVL,中国凌云的VisionWare和海康的VisionMaster等。
共性平台的图像处理任务主要有图像预处理、图像清晰度评价和晶圆图形标识识别等。进行图像预处理时,可以直接调用图像处理算法软件的预处理函数。对于图像清晰度评价,可根据清晰度评价算法对图像处理算法软件进行二次开发来实现。常用的晶圆图形标识识别算法有基于区域相关的和基于特征识别的两种。根据图形标识的类型和工艺要求开发合适的识别算法,识别算法还应该能够进行自适应的参数调整。
2.4电控系统
如图3所示,电控系统提供开放式的控制平台,能兼容不同模式的图像采集卡或相机,如基于PCI总线的采集卡、USB接口、千兆网相机等。在运动控制平台方面,要求兼容集中式控制和总线式控制方式,提供充足的数字及模拟输入输出接口。
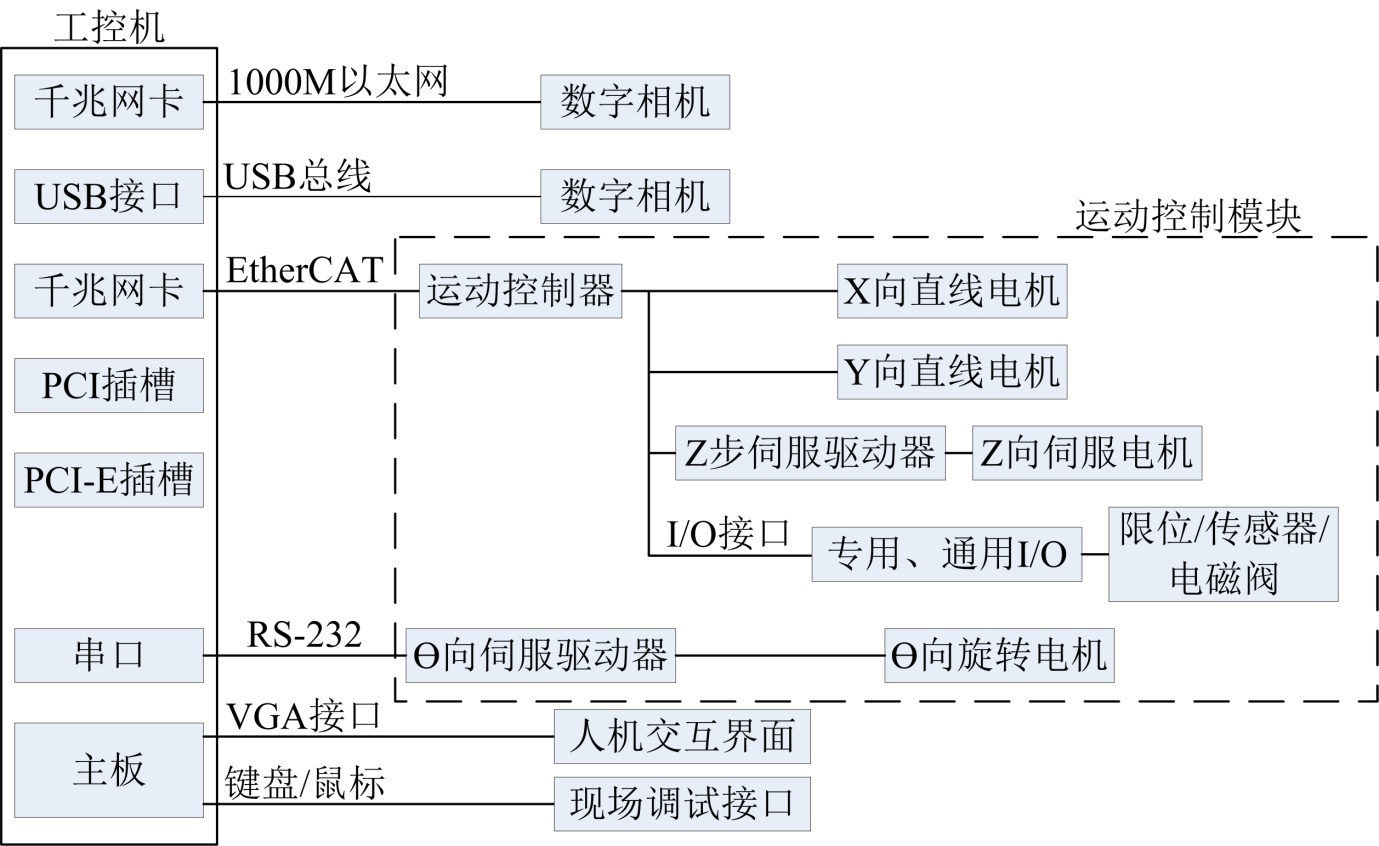
图3 电控系统框图
基于工控机的电控平台,预留6个PCI插槽、2个PCI-e插槽及6个USB接口,主板集成2个千兆口,以满足图像采集卡、运动控制卡接口需求。运动控制平台的总线式控制方式采用EtherCAT总线结构,硬件资源丰富,便于功能扩展。运动控制器集成3个伺服驱动器,可驱动直线电机、伺服电机,每个伺服通道集成电流环、速度环和位置环;集成4路步进电机驱动器控制通道、8路数字输入、8路数字输出、8路模拟量输入、2路模拟量输出;编码器最高输入频率50MHz,可满足绝大多数需求。
关键技术及解决方案
需要突破参数自适应调整的晶圆图形标识识别技术。基于特征的晶圆图形标识识别算法需要提取图像的特征。由于生产工艺的不同,不同晶圆上图形标识的表面颜色、边缘轮廓存在差异,造成了图像对比度不同,而特征提取结果受图像对比度的影响较大。
目前,对于使用固定参数提取特征的识别算法,由于对比度的变化,使特征的一致性和鲁棒性较差,严重影响识别的准确度。对于参数可以自动调整的识别算法,其参数也仅通过分析当前图像数据进行设置,虽然特征的一致性和鲁棒性有所提升,但仍会影响图形标识的准确识别。因此,需要在学习大量的图像数据、特征数据和参数设置数据的基础上,构建参数(如粗糙尺度、精细尺度和对比度阈值等)自适应调整模型,如神经网络模型等,用以分析当前图像数据,解决识别算法的参数自适应调整问题,适应识别不同对比度的晶圆图形标识图像的需求。参数自适应调整的晶圆图形标识识别流程如图4所示。

图4 晶圆图形标识识别流程图
结束语
本文结合电子元器件制造的现状,开展应用于电子专用封测设备的基于视觉伺服的晶圆自适应识别与定位技术研究,设计了满足4-6英寸晶圆的自适应识别与定位的共性平台,为具有兼容性的封测装备研制提供共性技术支撑,使封测设备能够自适应的用于加工不同类型和批次的晶圆,为快速适应生产制造各类高品质电子元器件提供保障。
参考文献:
作者简介:
林佳(1987-),男,山东潍坊人,博士,工程师,主要从事机器视觉、人工智能和电子工业专用设备方面的研究。
4

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



