宁波奥克斯电气股份有限公司 浙江省宁波市 315191
摘要:随着空调在家家户户普遍使用,人们对空调的智能需求也越来越高。本论文提出一种基于24GHZ的毫米波雷达的实验研究,以此验证在空调上的可行性。
本文采用雷达系统为2发4收装置,利用该硬件系统,它可以在线性调频模式下和多普勒模式下分别采集数据,再经过Matlab仿真,构造出了基于24GHZ雷达的距离-时间图(Range-Time-Map, RTM)、多普勒-时间图(Doppler-Time-Map, DTM)。此后,对采集的样本进行分类,采用卷积神经网络(CNN)加循环神经网络(RNN)和CTC算法来分别进行样本的训练和测试,本文具体所采用的用于分类和识别的网络框架模型是Resnet18+Lstm+ctc,最终实现对整个手势动作的自动特征提取与识别,验证该系统及算法的可行性和有效性。
关键词:雷达;线性调频;距离多普勒 CNN;RNN;Resnet18;Lstm;CTC;空调
1 引言
传统空调利用遥控器进行功能操控,界面不断更新,操作便捷度降低。但基于视觉图像的手势识别易受到环境制约;基于毫米波却能弥补两者缺陷,不受光线影响,安全保密性更高。本文研究内容分两部分:硬件平台和算法研究。
硬件平台:研究采用2发4收雷达系统,多根天线对回波信号进行接收,相比单输入输出雷达来说,目标检测更具辨识性。
算法研究:利用2维快速傅里叶变换估计手势目标距离、多普勒参数,形成时频图和RD图,最后通过卷积神经网络训练及CTC算法实现分类,达到手势识别的目的。
2 硬件平台
2.1 FMCW雷达硬件组成 ADF5901双通道发送器与频率合成器配合使用,ADF4159用于生成FMCW发送信号,两个TX天线来自ADF5901发送器,前端接收路径经ADF5904实现四通道接收,ADAR7251模拟前端用于放大和采样测量接收器的IF信号, DSP处理后,结果通过USB 2.0或CAN接口访问。
2.2 FMCW雷达工作原理
雷达内部信号源产高频信号,经发射天线,以电磁波形式向外辐射,若传播方向上存在目标物,会产生电磁波反射,接收天线收到回波信号,将其转化为电信号,后端设备进行后续信号处理[1]。本文采用三角波调制,FMCW模式下,可测量静止目标的距离。如图1所示:
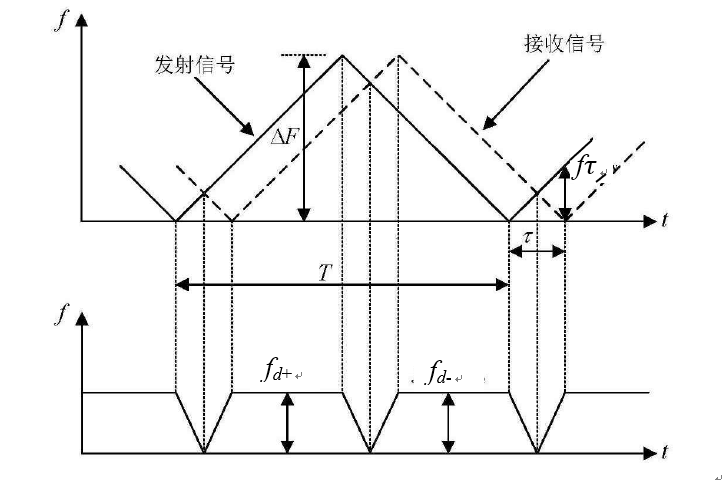
图1 目标静止时三角波调频雷达工作原理图
T:发射信号调制周期, :带宽,
:带宽, :信号在上升沿时经信号混频后在正向调频上产生的差频信号频率,
:信号在上升沿时经信号混频后在正向调频上产生的差频信号频率, :信号在下降沿时经混频后在负向调频段上产生的差频信号频率。
:信号在下降沿时经混频后在负向调频段上产生的差频信号频率。
 (1)
(1)
 :时间延迟,
:时间延迟, :光速,
:光速, :目标距离。混频输出中频信号
:目标距离。混频输出中频信号 频率根据三角关系,可得:
频率根据三角关系,可得:
 (2)
(2)
 (3)
(3)
当目标相对于雷达运动时,产生多普勒频移 ,如图2所示:
,如图2所示:
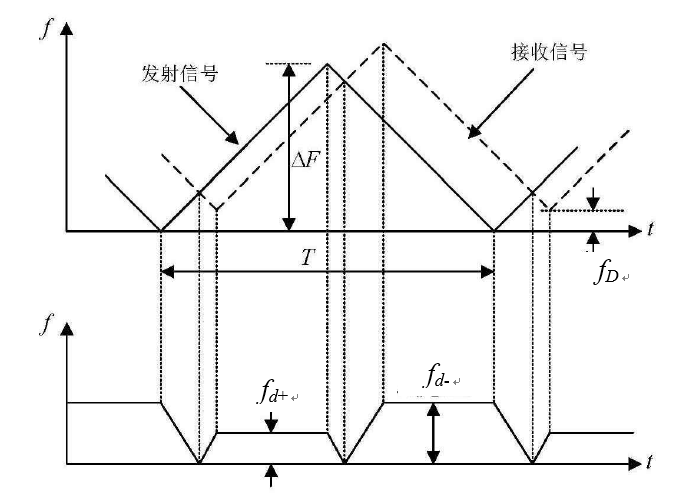
图2 目标运动时三角波调频雷达工作原理图
其中:
:多普勒频移, :雷达中心发射频率,
:雷达中心发射频率, :目标与雷达连线与目标在运动方向之间角度。默认
:目标与雷达连线与目标在运动方向之间角度。默认 ,得:
,得:
 v/c (5)
v/c (5)
其中:
 - (6)
- (6)
 + (7)
+ (7)
为目标相对静止时产生的中频频率, 为多普勒频移。两式相加可得:
 (8)
(8)
 (9)
(9)
将(6)减(7)可得:
 (10)
(10)
将(10)代入(5)可得:
V= (11)
(11)
3 数据采集与分析
3.1 FMCW雷达模式
本文采用时频分析方法[2],对被测信号进行A/D变换,利用DSP进行FFT,最终在matlab仿真。如图3所示:
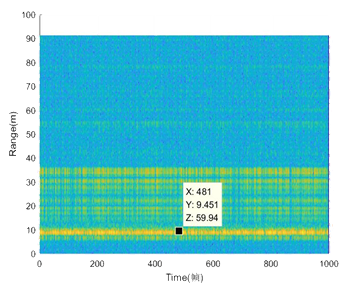
图3地方固定后前后挥手仿真图
因线性调频模式相干积累时间比较长,时间太短影响效果,故采集数据为1000帧。上图为人蹲在离雷达约9米,进行前后挥手,与仿真图结果一致。由于受环境限制,有很多杂波不能避免,需继续优化。
3.2 距离多普勒雷达模式
距离多普勒算法是对时域相关算法演变,作为一种广泛使用算法[3]。Matlab仿真时,选通道1为观察通道,雷达采集6种手势数据,生成各个手势的RD图。如图4为出前后挥手的RD图:
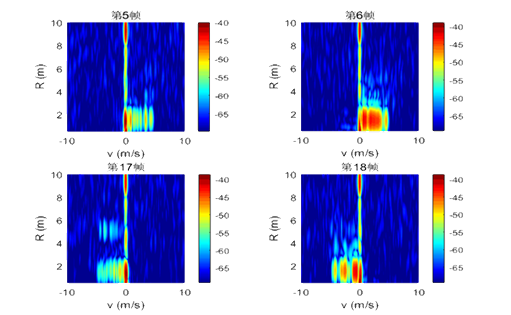
图4 前后挥手RD图
手势动作多普勒频率和能量都随着距离的变化而变化。在动作发生阶段,多普勒频率迅速增大,随后手臂远离雷达时,产生负多普勒频率。
4 数据处理
采用CNN+RNN+CTC算法,对RD图进行数据的自动特征提取与识别,本文采用网络框架模型为Resnet18+Lstm+ctc。
4.1 卷积神经网络
卷积神经网络包括输入层、隐含层和输出层,隐含层分三部分:卷积层、池化层和全连接层。输入层读取图像中的信息。卷积层为得到全局信息,对图像中的每一个特征进行局部感知,然后把局部特征进行综合操作。池化层对输入的特征图进行压缩,提取主要特征。池化层中拥有关于类别区分性的一些局部信息,连接所有特征,最终输出给分类器。全连接层实现对卷积层的整合。输出层采用逻辑函数或归一化指数函数来实现分类标签的输出。
4.2 循环神经网络
RNN为循环神经网络,与序列当前输出和前输出密切相关。包括输入层,隐藏层,输出层组成。隐藏层有一个数据循环,能实现时间记忆功能。本文采用LSTM算法。
4.3 CTC分类算法
CTC是对时序进行的分类算法,特征有3点:(1)条件独立,(2)单调对齐,(3)多对一映射。将采集的六种手势动作样本输入分类器,关于每个动作输入56个样本,采用CTC算法实现分类,得到准确率为96.4%,如图5所示。
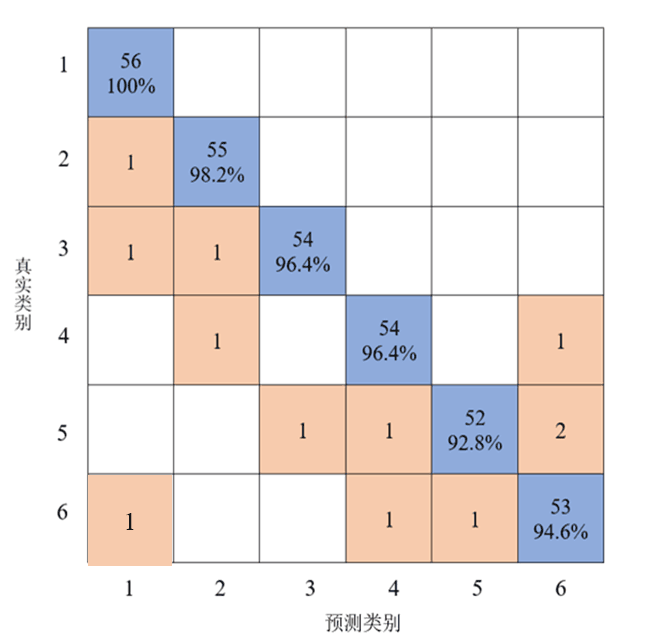
1、右左挥手 2、前后挥手 3、前后推拉 4、画对勾 5、画圆圈 6、画三角
图5手势动作的分类识别率
5 结束语
本文利用毫米波雷达硬件系统,在线性调频和距离多普勒雷达模式下分别对数据进行采集,然后通过Resnet18+Lstm+ctc的算法验证了应用在空调上的可行性,对智能空调器的开发提供了重要的指导意义。
参考文献:
[1]刘熠辰,徐丰.基于雷达技术的手势识别[J].中国电子科学研究院学报,2016,11(6):609-613.
[2] 刘康宁.基于时频分析的雷达信号调制方式识别技术研究[D].西安:西安电子科技大学,2014.
[3] 尹曼, 皮亦鸣. 结合 Chirp Z 变换的聚束 SAR 极坐标格式成像算法. 雷达科学与技术. 2007, Vol.5(5):349-370.
[4] 吴俊. 多基地SAR成像方法研究[D].电子科技大学,2016.
[5] 王俊,郑彤,雷鹏,张原,樵明朗.基于卷积神经网络的手势动作雷达识别方法[J].北京航空航天大学学报,2018,44(06):1117-1123.
作者简介:张姝赟(1994-09-05),女,汉族,籍贯:安徽黄山,毕业于武汉大学电子信息学院,硕士,现任宁波奥克斯电气股份有限公司研发中心技术研发一职,从事空调电控软件设计工作。
2 / 2

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2025 期刊网(www.qikanchina.com) 琼ICP备2021005105号



 =
= ,由(1)(2)可得:
,由(1)(2)可得: (4)
(4)