广州市海皇科技有限公司 广东省 511468
摘要:船舶的动力定位系统是一种闭环控制系统,它通过控制系统驱动船舶的推进器来进行抵消海风、海浪还有暗流等作用于船上的环境外力,从而能够让船舶在海平面要求的位置上稳定航行。动力定位系统通过测量系统不断的检测船舶的实际位置和目标位置的差距,然后再依据环境外力的影响计算出能够让船舶恢复到目标位置上所需要的推力大小,从而对于整艘船的各处推进器进行推力的分配,让各处的推进器产生相应的推力来进行克制海风、海浪和暗流等环境外力的影响,让船舶保持在正确的航海位置上或者是沿着预定的航迹进行航行。
关键词:船舶动力 定位设备 安装误差 校正测量
引言
动力定位系统的测量设备为船舶定位的实现提供最根本的信息,比如船位、舶向、参照位置等。定位所依赖的测量设备,应按设计要求布设在船舶的特定位置,但在实际的装配施工中,会因各种因素的影响导致设备定位位置与设备设计位置发生偏差,影响定位的精度。因此,为了校正这种偏差,必须获得被测量设备的特征点相对于船体参考点的精确位置及其相对位置关系。若采用测绘的技术手段和方法,对定位设备的传感器进行相关的测量和空间位置关系的转换,获取设备特征点的精确位置及姿态数据,然后输入控制系统自动进行设备偏差的修正,则可以尽量消除定位传感器由于安装位置的不精确造成的误差。
1.动力定位系统的组成和分类。
最开始的时候,国际海事承包商协会IMCA的《动力定位船舶设计和使用指南》当中,动力定位系统包括了三个部分:动力(power)、控制(control)还有参考(references)。动力可以再次被分成发电、配电还有用电(推进器系统);控制指的是功率的管理系统,有着自动和手动两种方式,还有位置控制系统;参考就是本意上的位置、环境还有船舶方位的传感器。
因为海上作业船舶对于动力定位系统的可靠性要求变得越来越高,国际海事组织IMO还有各国的船级社对于动力定位系统都提出了非常严格的要求,除了在各种环境条件下都能够具有的手动控制还有自动控制的基本要求之外,还制定了三个等级标准,这样做的目的是对于动力定位系统的设计标准、必须要安装的设备还有操作的要求和试验的程序以及文档给出相应的建议,从而能够降低动力定位系统控制下的作业施工时候对于工作人员、船舶。
1.1.1设备的等级一:在单故障的情况下可能发生的定位失常。
1.1.2设备的等级二:有源组件或者是发电机、推进器、配电盘遥控阀门等系统单故障的时候,不会产生定位失常的状况,但是当电缆、管道还有手控阀等静态元件发生故障的时候可能会产生定位失常。
1.1.3设备的等级三:任何的单故障都不能够导致定位发生失常。
动力定位系统的分级主要是为了考虑设备的可靠性,从而保证DP安全可靠的运行,避免在DP作业的时候对于工作人员、船舶还有其他的设备产生危害。
2.测量方案
1)控制网布设:在船坞周围布置控制测量点,使用测量设备和相关辅助设备对全局控制点进行三维坐标测量,在全局空间内建成高精度测量控制网。
2)船舶坐标系构建:通过基线测量建立船舶相对独立坐标系。
3)设备定位测量:布设主甲板控制点,测出位于船舶特定位置的被测设备在控制网中的实际安装位置和姿态。
4)测量成果综合化归处理:指将控制网信息、船舶主甲板控制点、船舶设备三维信息统一化归至由基线确定的独立船舶坐标系内。
得到被测设备特征点在船舶坐标系的三维坐标信息和方位信息等精确数据,供给船舶控制系统使用,即可校正偏差。详细的测量及计算过程,可以按以下步骤进行。
2.1船舶坐标系的构建
根据船舶资料,建立船舶坐标系。所测控制点的数据经过坐标系转换,便可将控制网所在坐标系转换至船舶坐标系下。HYSY286及类似的工程船船型,建立船舶坐标系可以参考图2方法。
在图2(a)中,船首方向的基线为x轴正方向,尾柱与基线的交点为坐标系原点,沿尾柱向下为z轴正方向。在图2(b)中,Y轴正方向与X轴、Z轴构成坐标系,Y轴正方向指向船体右舷。
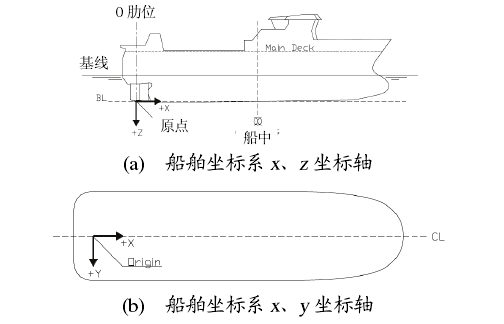
图2船舶坐标系
2.2船舶设备位置校正
在对设备进行测量并获取设备位置和姿态信息后,便可以将设备相对于船的精确安装位置和姿态数据输入动力定位系统软件中,进行设备特征点相对于船舶重心或船舶定位参考点的标定校准,纠正偏差,使船舶在动力定位过程中有更精确的定位信息。
3.高性能船舶动力定位系统设计方案分析
3.1船舶电力系统的设计
首先,在船舶动力定位系统的电力系统设计中,主要设置了两台特定功率的轴带发电机。同时还设置应用了两台不同功率的主柴油发电机和一台特定功率的应急发电机。此外,还在船舶动力定位系统的电力系统设置了一个12屏主配电板,并设置有相应的应急配电板。对于电力系统的电站设置有专门的电站管理系统,能够对电力系统电站机组的自动起停运行以及自动并车、转移负载、大功率负载询问、机组运行故障报警处理等功能进行控制。总之,对于船舶的动力定位系统来讲,电力系统部分主要是提供进行动力定位的侧推、方位推等设备运行中所需的驱动动力。同时,为船舶中的各种设备以及操作控制系统进行工作电源的提供与保障。
3.2船舶推进系统设计分析
其次,在进行与船舶动力定位系统相关的推进系统设计中,主要就是进行推进主机、齿轮箱、轴系、可调桨以及方位推等设备装置的设计。船舶运行过程中主机与轴带电机、方位推与艏侧推等之间,可以相互进行备用,以实现对船舶推进系统的安全可靠运行提供保障。通常情况下,在船舶设计制造中,船舶推进系统中的各个主要设备通过通讯线路与动力定位控制系统实现相互联系,同时通过动力定位系统的控制作用,实现船舶运行中的动力推进功能。
4.结束语
总之,高性能船舶动力定位系统,对于船舶自动化航行过程中的问题避免,以及对于恶劣天气条件下的船舶航行安全保障等,都有着积极的作用和意义。因此,进行高性能船舶动力定位系统技术的分析,也具有积极的作用和很高的价值意义。
参考文献
[1]赵大威,边信黔,丁福光.非线性船舶动力定位控制器设计[J].哈尔滨工程大学学报.2011(1).
[2]王宗义,肖坤,庞永杰,李殿璞.船舶动力定位的数学模型和滤波方法[J].哈尔滨工程大学学报.2009(4).

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



