西安爱生技术集团公司 710089
摘要:在当今更加复杂的战争环境中,无人机通常以协调的舰队执行特殊任务。因此,本文构建了无人机联合任务计划系统的模型,并对无人机联合任务计划控制系统,多目标任务分配架构,无人机目标融合体系结构和弹道计划模型进行了设计研究。通过结合层次聚类算法和数值模拟实验,我们旨在确认设计的有效性,进一步提高无人机在复杂和动态环境中的飞行适应性,并为在最短时间内开发合理的无人机协作任务分配提供合理的计划,理论上的帮助。
关键字:复杂环境,无人机,协作任务,模型规划
简介:随着近几年无人机技术的飞速发展,基于无人机联合任务计划的实现多个战略目标的合作已成为许多领域特别是军事领域的重要发展成就之一。其中,所谓的多无人机协作系统,是指由多个无人机组成一个整体来实现一个综合战略目标的任务机制,可以利用多个无人机的信息共享功能来实现无人机的任务效率。发挥最大作用。在这方面,有必要考虑到多目标状态的不确定性和目标的多样性,合理地控制无人机的资源分配,并依靠无人机轨迹规划模型来确保无人机到目标的全范围。通过覆盖并减少无人机定位错误,您可以灵活地应对定位目标的意外情况。
1多无人机协作任务计划和控制体系结构
如果是一架无人驾驶飞机,它会构建一个层次结构和一个包容性架构。分层结构是指人类思维行为的模型,并建立了依赖于老板的“感知-思考-执行”的组织系统。它使用实时通信来确保系统的执行能力,因此其实用性相对较差。相反,包容性体系结构采用“感知执行”单元的独立操作模式,尽管不需要依靠组织的通信来执行任务,但是缺乏全局控制使创建局部最佳情况变得容易。在这方面,基于多个系统的优缺点构造了如图1所示的分层和分层的分布式工作计划控制系统结构。
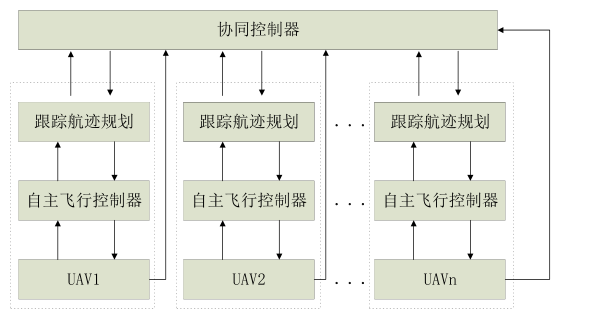
图一:分层递阶分布式任务规划控制体系结构
基于此,我们基于任务结构构建任务执行模型框架。其中,无人机根据指定的信息在任务区域内找到目标,然后准确确定任务目标的位置并进行系统分析,以确保对目标状态信息的连续监视。因此,传感器通常用于跟踪目标,并且由于传感器本身的观察范围有限,因此有必要基于多架无人机的协同目标跟踪来实现对目标信息的实时监控,以形成多UAV协作,如图2所示,跟踪多目标系统架构。
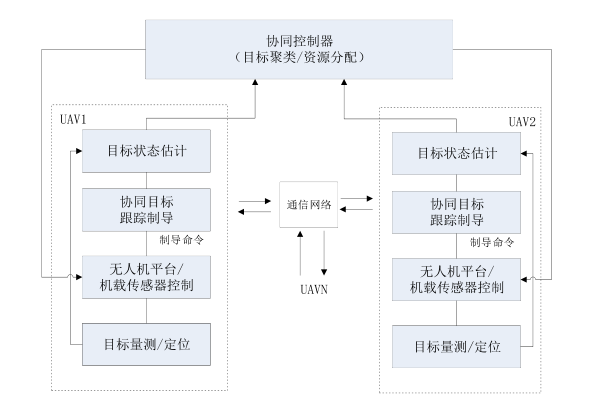
图二:多无人机协同跟踪多目标系统架构
2多无人机多目标分配控制体系结构
由于在无人机执行任务时任务目标分散,因此必须对无人机进行合理地分组和分配以满足多个目标的跟踪要求。其中,特定无人机的数量和目标的分散特性无法预先预测,任务目标可能会意外发生,因此必须考虑疏散区域的情况来选择分配算法。在这方面,我们使用分层聚类算法来分析问题,但是由于分层聚类算法不适用于地面静止或速度较慢的目标,因此我们需要在目标初始化状态下完成所有对象的聚类。类,并通过层次聚类算法的变换来完成多个对象的合理分组。
基于此,仿真实验是基于多目标分层聚类算法的,该算法基于对五个无人机系统进行跟踪六个目标(包括目标分离,目标组合和进入被遮挡区域的目标)的数值模拟的结果。已经完成了。分层聚类算法具有一定的适用性,可以平滑解决许多问题,包括无人机面临的障碍,可以满足多无人机多目标分配的实际需求。
3用于多无人机协作的融合架构
设计和应用多无人机目标融合架构也很重要,以便完全应对任务目标可能出现的意外情况。其中,不同无人机的目标信息来自多个传感器,因此基于不同数据周期和地理位置信息进行融合的方法是无人机协同目标融合的核心。为了解决该问题,通常可以使用集中式,分布式结构,分层分布式结构等,但是由于前两种架构具有某些缺点,因此它们是基于全面研究而设计的并且可以针对每个融合节点进行选择。执行本地数据处理的分层分布式体系结构执行目标融合,如图3所示。
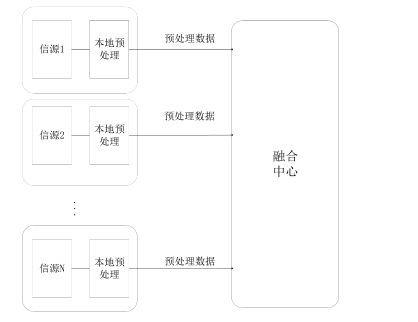
图三:递阶分布式融合架构
另外,使用IMM_UKF算法和IMM_EKF算法进行仿真实验,并通过数据过滤和融合分析形成比较数据。其中,IMM_UKF算法在200秒实验中的目标融合效果比较好,Y轴误差低于X轴误差,特别是在120秒后的转弯步骤中,前者的距离误差明显低于后者。
4多无人机航迹模型架构
除了无人机执行任务期间多架无人机之间的协调问题外,避开障碍物和无人机的禁飞区控制问题也很重要,为此,您通常可以使用距离保持悬停跟踪模式。一方面,通过跟踪目标来解决无人机的缺点,保持直接跟踪速度太快,而在转弯操作的基础上,可以实现对目标群的全向探测而没有盲点,减少了实战。地面机动目标对无人机的威胁程度。首先,对于单个无人机,将LGVF距离保留算法用于跟踪控制,并将反馈控制添加到该算法中,以形成LGVF距离保留算法架构,如图4所示。调整PID值以加快原始LGVF的收敛速度。其次,考虑到障碍物环境,根据尽可能不偏离原始路径的原理执行障碍物避开控制。在障碍物上空飞行之后,LGVF导航矢量被用作控制无人机以收敛到以任务目标为中心的极限圆的主要控件。
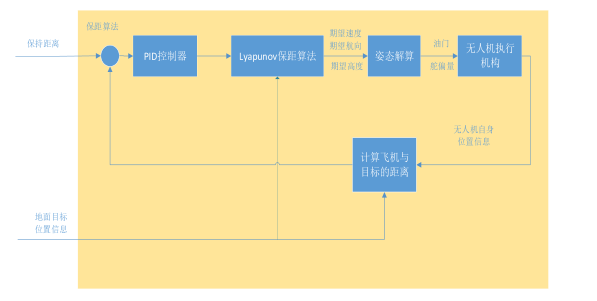
图四:LGVF保距算法架构
在此基础上,我们分别针对单架无人机和多架无人机进行了避障模拟实验,其中以固定翼无人机为例进行试验,结果发现两次避障转弯是最好的处理方法。而且由于无人机之间存在一定的相角,可以证明该算法满足无人机避障要求,具有特殊的应用潜力。
5调整无人机轨迹的方法
无人机的航迹调整方法从四个方面开始,包括速度,飞行运动,时间调整和航迹长度调整。所谓速度调整,是指调整多架无人机的飞行速度,使多架无人机的速度相对均匀,使多架无人机可以同时到达其飞行位置。但是,机械协调的飞行速度是有限的,因此协调无人机的飞行路径长度之间不能有很大的差距。如果不同无人机的计划长度相差太大,则基本上需要调整无人机的飞行运动,以使无人机最终可以一起到达任务地点。调整无人机的飞行行为可以提高无人机的机动性。不同的飞行模式可让您延长无人机的飞行时间,并有效地改善以后调整无人机的飞行路径长度时出现的问题。我们通过调整无人驾驶飞机的飞行时间,消除所有外部因素,为每架无人驾驶飞机生成替代的飞行轨道并量化团队的总到达时间,来设计单次飞行的最独特的轨道。这种协调方法将任务失败的成本降至最低。美军在模拟战中实践了无人机轨迹调整技术。事实证明,这种做法不仅是因为轨道调整技术已成功到达任务位置,而且还由于时间调整技术的支持,以确保多次无人机调整任务。万一发生故障,每架飞机也可以独立飞行到任务地点。此外,它获得了多点轨迹规划技术,并将其合理地应用于无人机的飞行轨迹技术。
结论:为响应跟踪多个无人机协作目标的需要,阐明了协作系统体系结构在军事和私营部门中的应用价值,并在对无人机协作任务计划控制系统进行简要分析的基础上探索了协作机制的具体构建方法。是的,多目标任务分配架构,无人机目标融合架构以及弹道计划模型仿真实验证明了该算法应用的有效性,希望这将有助于无人机系统的进一步完善和推广。技术的进一步发展。
参考文献:
[1]竺殊荣.动态环境下多无人机协同任务规划方法[D].南京邮电大学,2019.
[2]张灿.多无人机协同任务规划的仿真系统设计与实现[D].南京邮电大学,2019.
[3]刘畅,谢文俊,张鹏,郭庆.多目标群多基地多无人机协同任务规划[J].弹箭与制导学报,2019,39(01):119-124.
[4]杨晨,张少卿,孟光磊.多无人机协同任务规划研究[J].指挥与控制学报,2018,4(03):234-248.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



