1江苏大学,江苏镇江市 212000 2扬州大学,江苏扬州市 225000
摘要电动汽车及其相关技术是目前汽车行业的研究热点。电动汽车的能量储存在动力电池中,无法直接测量,而电池能量状态的影响因素众多,很难估计准确,从而使电动汽车续驶里程估计不准。本文针对电动汽车各种使用条件,考虑了温度、电池耐久性、 和电流因素对电池产热的影响,分析了产热比例。
和电流因素对电池产热的影响,分析了产热比例。
关键词:电动汽车;锂离子电池;温度预测; 的车载电池温度管理系统研究
1 研究现状以及优化措施
1.1电池SOC估计算法研究现状
电池的充电状态( )反映了电池的当前温度,这是电池最关键的状态量之一。因此,许多SOC估计算法都依赖于电池状态估计。对于电池温度预测, 值也与 状态密切相关,因此需要准确的 估计。另外,对于实际的车辆运行状况,为了防止由于模型估算不正确而导致电池过放电,并且出于安全考虑,通常不使用 的下半部分[1]。如果可以提高 估计的精度,则可以基于温度预测提前降低电池电流的输出,并且可以提高电池能量的利用率[2]。因此,准确的 估算对于电动汽车的行驶范围非常重要。
值也与 状态密切相关,因此需要准确的 估计。另外,对于实际的车辆运行状况,为了防止由于模型估算不正确而导致电池过放电,并且出于安全考虑,通常不使用 的下半部分[1]。如果可以提高 估计的精度,则可以基于温度预测提前降低电池电流的输出,并且可以提高电池能量的利用率[2]。因此,准确的 估算对于电动汽车的行驶范围非常重要。
1.2改进电池 估算法
串联电池组电荷量SOC通常采用式(1-1)表示:
 (1-1)
(1-1)
当i=j时,此时可化简为式(1-2):
 (1-2)
(1-2)
串联电池组的 估算可通过单只电池i的SOC进行估算。
估算可通过单只电池i的SOC进行估算。
目前,人们通常根据卡尔曼滤波算法应用系统的不同,将卡尔曼滤波算法划分为标准卡尔曼滤波算法和扩展卡尔曼滤波算法。其中,标准卡尔曼滤波算法的通常对线性系统进行滤波处理,它对系统动态变量具有较高的预估作用[3]:
状态方程: (1-3)
(1-3)
输出方程: (1-4)
(1-4)
上式中, 、
、 、
、 分别用于表示系统输入和输出相关信息,
分别用于表示系统输入和输出相关信息, 用于表示过程噪声变量大小,
用于表示过程噪声变量大小, 用于表示系统观测的噪声变量大小,而
用于表示系统观测的噪声变量大小,而 、
、 、
、 、
、 则输入输出参数系数。
则输入输出参数系数。
由于车载电池为一个非线性系统,其电池电量以及电池充放电倍率都为非线性对应关系,故系统借助扩展卡尔曼滤波算法进行信号处理时,会将非线性信号转换线性信号[4]。当系统借助扩展卡尔曼滤波算法进行处理时,其扩展卡尔曼滤波算法模型可用式(1-5)(1-6)进行表示:
状态方程: (1-5)
(1-5)
输出方程: (1-6)
(1-6)
上式中,  用于表示非线性系统转移函数,而
用于表示非线性系统转移函数,而 则为非线性测量函数
则为非线性测量函数
考虑到电池的非线性特性,本论文采用修正后的卡尔曼滤波算法对电池 进行测算。当系统完成对电池相关参数测量时,系统首先借助扩展卡尔曼滤波算法进行修正,再根据修正的结果进行计算[5]。通过扩展卡尔曼滤波算法处理后,其能够很好的解决电池的非线性特性的问题:
1、模型选择
系统状态方程: (1-7)
(1-7)
系统输出方程: (1-8)
(1-8)
上式中, 为 值大小,而 为电池负载电压值大小,而 、
、 、
、 、
、 、
、 为待辨识的电池模型参数,其输出获得对高精度评估电池 大小具有重要的作用。该数值的获取需经过由电池从一个满充电状态以标准放电速率放电的过程,并通过最小二乘法进行拟合,即可获得相关参数数值大小。
为待辨识的电池模型参数,其输出获得对高精度评估电池 大小具有重要的作用。该数值的获取需经过由电池从一个满充电状态以标准放电速率放电的过程,并通过最小二乘法进行拟合,即可获得相关参数数值大小。
2、系统参数选择
比较式(1-5)(1-6)和式(1-7)(1-8)可求得系统参数 和 ,其结果如下所示:
和 ,其结果如下所示:
 (1-9)
(1-9)
 (1-10)
(1-10)
3、算法状态初始化
 ,
,  (1-11)
(1-11)
上式, 电池内部电荷初始值,
电池内部电荷初始值, 为电池内部电荷均方差误差。
为电池内部电荷均方差误差。
4、扩展卡尔曼滤波算法循环迭代计算:
 (1-12)
(1-12)
上式: 预测的电池内部电荷量大小,而 则为预测的电池电压值大小,
预测的电池内部电荷量大小,而 则为预测的电池电压值大小, 则为系统预测均方估计误差大小,
则为系统预测均方估计误差大小, 则为计算的卡尔曼增益系数,
则为计算的卡尔曼增益系数, 则为电池内部最优估计电荷量 大小,而
则为电池内部最优估计电荷量 大小,而 则为均方估计误差大小。
则为均方估计误差大小。
根据上述分析可知,车载电池 可根据前一次电池剩余电量以及当前开路电压大小计算得出。为了提高系统整体估算精度,文中借助扩展卡尔曼滤波算法对采集的信号进行评估,最大限度的提高系统整体测量精度。
2 优化结果
为了验证文中设计的车载电池管理系统均衡功能模块整体性能指标,首先将车载电池管理系统进行关闭,并对车载电池进行多次充放电,从而使得车载电池温度出现了明显不一致,其各电池组
值如图2-1所示[6]。
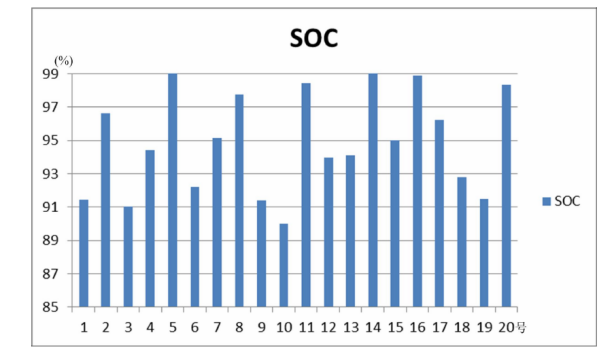
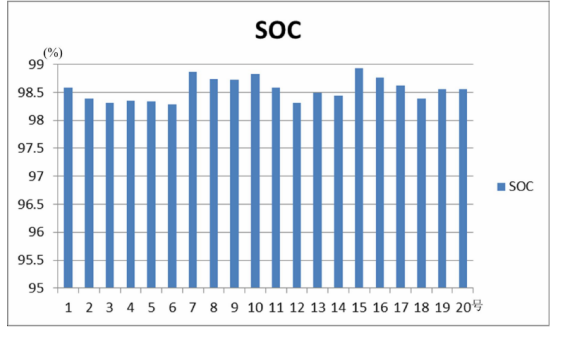
图2-1未采用均衡的电池SOC值 图2-2均衡后电池SOC值
在明确电池组中各个电池 出现不平衡时,由车载电池管理系统对各个电池进行均衡处理,经过多次充放电实验后,其管理后的电池组各个电池 值大小如图2-2所示。
通过上面两图对比分析可知,当车载电池未进行均衡处理时,车载电池组中各个单体电池之间的 最大差异为8%。在确定车载电池组不平衡时,使用均衡控制策略后,其车载电池组中各电池 之间的最大差异控制在1%左右。因此,通过分析可知,文中设计的车载电池管理系统能够有效消除各个电池 之间的不一致性[7]。当车载电池管理系统对车载动力电池电容量进行均衡处理时,其均衡所花费时间由车载动力电池状态所决定。在对电池组进行均衡时,其均衡时间长短受电池之间 最大差值的影响。当车载电池组中各单体电池 最大差值为16%时,车基于嵌入式技术的车载电池管理系统均衡时间通常为5h左右。当车载电池组内各电池 相差最大为2%时,车载电池管理系统需运行0.8h,其测量结果与理论计算结果相符合。
3 结论
本文改进的 估算法可同时对电池组内多个单体电池进行放电均衡,具有均衡速度快等优点。同时支持热管理,可准确地估算出电池温度,并对电池进行主动式冷热管理,延长电池整体寿命,从而很好的达到了车载电池温度的测量与控制。
估算法可同时对电池组内多个单体电池进行放电均衡,具有均衡速度快等优点。同时支持热管理,可准确地估算出电池温度,并对电池进行主动式冷热管理,延长电池整体寿命,从而很好的达到了车载电池温度的测量与控制。
参考文献
[1]朱刚.电动汽车电池管理系统(BMS)现状分析[J].通信电源技术,2016(5):156-157.
[2]曹志良.车载锂离子电池组均衡充电管理系统的研究[J].电源技术,2014,38(3):569-571.
[3]王倩.锂电池管理系统及均衡算法的研究与实现[D].河北科技大学,2014.[4]于广电动汽车动力电池管理系统研究与设计[D].2016.
[5]李改有,杨姜,席光荣.一种混合动力车载锂电池管理系统[J].电子世界,2016(1):46-48.
[6]刘丽.新能源车辆的动力电池组均衡管理系统的发展现状概述[J].中国机械, 2014(11):12-13.
[7]庞敬礼. 基于嵌入式技术的车载电池管理系统研究与设计[D].江苏大学,2019.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



