中交第二公路勘察设计研究院有限公司(湖北武汉 430056)
摘要:本文以广西壮族自治区桂柳高速改扩建项目为例,靶标点平面测量采用GPS快速静态方法施测,高程测量采用电子水准仪与项目水准网同步构网施测,然后用经平差计算后的靶标点三维坐标来整体纠正激光点云,使激光点云数据成果能够满足相关精度要求。经检查计算,最终激光点云成果平面中误差不大于±5cm,高程不大于±2cm,满足高速公路改扩建对于激光点云的精度要求,为今后同类工程项目提供了一定参考意义。
关键词:公路改扩建;激光扫描;靶标点
近年对既有高速进行改扩建逐渐成为提升公路通行能力和服务水平的重要手段,相比新建项目,其优势在于建造成本低,占用土地少等特点。高速公路改扩建项目传统测量方法需要作业人员在正常通行的高速公路路面进行特征点数据采集工作,存在着数据采集量大,工作周期长,劳动强度大,安全风险高,工期难以保证等问题。随着测绘技术的不断发展,尤其是车载激光三维扫描技术在公路勘察领域的应用,为高速公路改扩建项目提供较强的技术支撑。
一、广西桂柳高速公路改扩建工程简介
广西桂柳高速公路改扩建里程约100公里,测区雨量充沛,植被茂密,属呈丘陵地形。路线大致呈南北走向,该高速公路自建成通车以来,极大的推动了沿线市县的经济社会发展,成为连接周边大中城市的便捷通道,随着交通流量的迅速增长,通行能力和服务功能已经满足不了发展的需求,拟在原路的基础上实行改扩建。车载激光扫描系统获取的原始点云的平面和高程精度都无法满足高速公路改扩建的要求,因此需要利用沿高速两侧所布设的一定间距的靶标点来纠正点云的平面及高程精度,使最终点云成果数据能够满足高速公路改扩建的平面中误差不大于±5cm,高程中误差不大于±2cm的精度要求。
二、车载激光扫描技术
车载激光扫描系统是集激光扫描系统、全球定位系统(GNSS)、惯性导航系统(IMU)、全景相机、同步控制单元为一体,利用汽车作为运载体以一定的行驶速度对路面及周边地形进行三维激光扫描测量,最终获取高密度、高精度的三维激光点云数据,以满足项目设计对公路基础测量数据的需求。
1.车载激光扫描测量作业流程(图1)
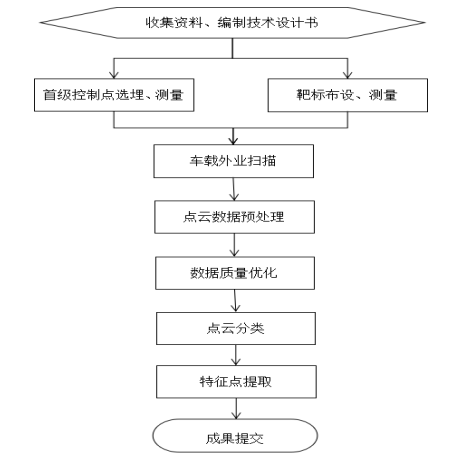
图1 车载激光扫描作业流程
2.靶标点布设
靶标点布设单侧间隔500m,双向交错间隔250m。同时,在GNSS信号受影响区域应适当加密(如隧道口前后均应补充靶标点),路线首尾处两侧车道均布设靶标点。靶标点基于点云中记录的地物灰度信息进行识别。为此,在公路应急车道涂刷白色快干漆的方式布设标靶点,涂刷尺寸为30cm*30cm正方形,并使用其中一个角点为测量点。精度检核点按间隔不大于1000m均匀分布于应急车道上,左右车道均布设(即每隔约500m沿道路两侧交错布设)。
3.靶标点测量
为保证激光点云成果平面精度不大于5cm,高程精度不大于2cm的总体要求,所有靶标点平面测量参照《公路勘测规范》(JTGC10—2007)GPS一级网观测技术指标执行,即采用GPS快速静态模式进行,用10台GPS接收机以点连接方式进行同步观测,并每隔5km联测于项目首级平面控制点(四等),共测量靶标点627个,其中用于激光点云纠正靶标点417个,精度检核点210个,采用首级平面控制点为起算点进行约束平差计算,经计算后最弱点位中误差为1.4cm,满足《公路勘测规范》(JTGC10—2007)的精度要求。靶标点高程测量采用徕卡DNA03电子水准仪测量,参照《公路勘测规范》(JTGC10—2007)水准测量技术指标执行,与项目首级控制网控制点进行整体施测,并按照一定间距使两侧靶标点水准路线构成闭合水准路线,增加水准网检核条件,有效检核靶标点测量误差和各种错误,从而避免因使用有粗差或者错误的靶标点高程导致最终点云成果畸形。通过此种测量方法不仅使所有靶标点与项目首级控制点具有同等的高程精度,更大大提高激光点云数据的可靠性,保证了激光点云数据的高程精度(表1)。
表1 GPS一级网观测主要技术指标表
等级 | 卫星高度角 | 时段长度(min) | 有效卫星数 | 采样率(s) | GDOP |
GPS一级(快速静态) | ≧15° | ≧15 | 4 | ≦30 | ≦6 |
4.路面激光扫描
车载激光扫描系统采用加拿大Optech LynxHS600系统,设备检校是保证车载移动激光扫描测量成果精度的核心环节,作业前在测区附近选取特征建筑物进行检校,以确定激光传感器的Heading、Roll和Pitch三个姿态角;如沿点状地物两侧同方向测量,heading角误差会导致该点状地物在平面位置上存在不匹配问题,顶视图表现为平面位置上的错位;Pitch角误差会导致与行驶方向垂直的同一墙壁点云数据不匹配,剖面图表现为两条交叉线;Roll角误差与行驶方向平行的同一墙壁点云数据不匹配,剖面图表现为两条交叉线。选取6个首级控制网点作为GPS基站点,确保基站覆盖半径小于15km,采样频率设为2Hz,并且每台基站在作业前30分钟开始数据记录,作业后30分钟停止数据记录。为保证扫描数据质量,作业过程中行车速度保持在以50km/h,且尽量匀速行驶;由于待改扩建高速公路车流量大、部分道路两侧植被茂密,车载激光扫描车行进过程中的 GPS 动态观测条件并不理想,为保证外业激光扫描数据的质量及减少因车辆遮挡导致的数据漏洞,本项目进行两次完整的外业数据采集。
5.数据处理及精度检核
原始车载激光点云数据平面精度只能达到10cm,高程精度只能达到5cm,利用道路两侧布设的417个靶标点进行点云平面改正和高程改正,并以210个精度检核点作为优化后点云的精度检核点,经分析计算,点云平面中误差为:![]() ,(见表2);点云高程中误为:
,(见表2);点云高程中误为:![]() (见表3),经改正后的点云精度优于平面不大于0.05m及高程不大于0.02m的精度要求。为进一步验证优化后的点云高程精度,采用徕卡1201全站仪随机在路面测量714个检查点(测站至测点距离不大于150米),经与点云进行比较计算高程中误差为
(见表3),经改正后的点云精度优于平面不大于0.05m及高程不大于0.02m的精度要求。为进一步验证优化后的点云高程精度,采用徕卡1201全站仪随机在路面测量714个检查点(测站至测点距离不大于150米),经与点云进行比较计算高程中误差为![]() ,(见表4),高程精度优于0.02m,可见,经改正后的点云数据质量较高。此外,因车辆遮挡导致的数据漏洞,用同位置、同精度的另一次激光点云进行填充,以保证激光点云能够完整反映实际路面状况。
,(见表4),高程精度优于0.02m,可见,经改正后的点云数据质量较高。此外,因车辆遮挡导致的数据漏洞,用同位置、同精度的另一次激光点云进行填充,以保证激光点云能够完整反映实际路面状况。
表2车载激光点云平面误差(m)
Dx | Dy | Ds | ||||
Xmax | Xmin | RMSE | Ymax | Ymin | RMSE | 0.024 |
0.054 | -0.043 | 0.18 | 0.041 | -0.041 | 0.017 | |
表3 车载激光点云高程误差(m)
Hmax | Hmax | RMSE |
0.053 | 0.002 |
表4 检查车载激光点云高程误差(m)
Hmax | Hmax | RMSE |
0.038 | -0.036 | 0.14 |
6.路面点提取
对改正后的激光点云进行分类,分离出地面点与非地面点。利用地面点可以制作DEM获取地面信息。结合激光点云强度信息的特点,可利用软件自动提取公路改扩建勘察设计所需的原有道路车道标志线、中央分隔带、横断面等数据信息,以满足设计对基础数据的需求(图2)。
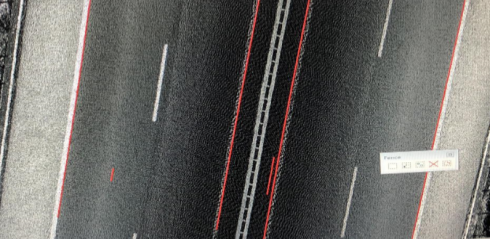
图2 车载激光反射强度示意图
三、结语
靶标点测量采用GPS快速静态测量、水准测量通过与首级控制点进行整网施测,不仅有效保证了所有靶标点的精度,同时也为激光点云的进一步优化与纠正提供了更为精确的基准数据,提高了激光点云成果的可靠性,满足了激光点云平面中误差不大于5cm,高程中误差不大于2cm的精度要求,为后期路面信息提取提供更为精准的三维激光数据,更有效减少了项目水准测量工作量,缩短了项目工期,有效提高了项目整体效益。
参考文献:
[1]JTG C10-2007.公路勘测规范[S].
[2]王璐.高速公路改扩建测绘项目勘测关键技术研究[J].工程技术研究,2018(11):72-73.
[3]黄文元,党建军,黄爱华.我国公路改扩建工程勘测方法对比分析[J].公路2011(03).
[4]魏国忠,侯飞,张衡等.高速公路勘测中车载激光点云高精度校正可行性分析[J].测绘通报,2016(8):20-24.
[5]李琴.车载移动测量系统的数据处理及应用[J].测绘通报,2014(S2):129-132.
【作者简介】雷攀(1984.09-),男,汉族,湖北武汉市人,本科学历,中交第二公路勘察设计研究院有限公司工程师,主要研究方向:公路工程测绘生产。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



