塔里木大学机械电气化工程学院 新疆阿拉尔市 843300
摘要:伴随着科技的进步和发展,人们对智能多功能护理床的要求也越来越高,在追求其舒适性的基础上,更加看重其实用性。基于此,人们设计并研发了一种多功能的床椅一体化护理床。为了对此机构进行简化,避免其受到抬背机构和床椅机构的影响,对传统的电动推杆进行了改进。本文借助人机工程仿真软件,对床椅一体化护理床抬背机构的运动情况及滑移补偿情况进行了分析,具体内容如下。
关键词:护理床;抬背机构;滑移机构;人机工程学
近年来,智能设备被越来越多的运用到医疗行业和服务领域中来,其中智能护理为人们带来便利的同时,也进一步改善着其生活质量。智能化装备在护理过程中的有效应用,可极大的减轻护理人员的工作量,缓解其心理压力,降低社会及家庭的负担,且有助于病人的生活自理。当前,护理床的功能愈加完善,为了进一步提升其舒适度,本文对多功能护理床展开了创新研究,并详细分析了抬背机构和滑移补偿机构的重要作用。
1.抬背机构运动分析
1.1转角式抬背机构分析
在对多功能护理床的抬背动作进行模拟时,可采用西门子人机工程仿真软件进行,抬背时,人体髋关节的旋转中心,并不重合于护理床机构的旋转中心,从而导致其压力重心出现了滑移。在抬背过程中,其转矩跟随人体抬背角度的一起改变。如图1,对运动模型进行简化分析,T为驱动抬背的总转矩,将其分为T1和T2,其分别为驱动背板和驱动人体上半身运动的转矩,r1和r2分别为背板重心距离旋转轴旋转中心的长度及人体上半身重心距离髋骨旋转中心的长度,抬背速度为ω。
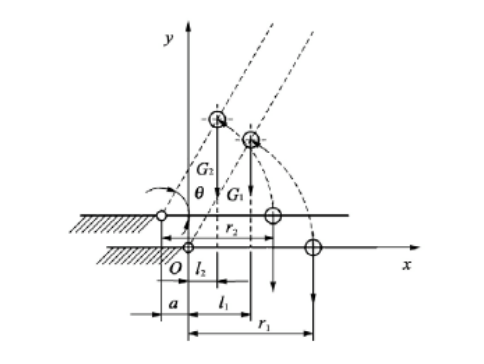
图1抬背结构简图
1.2背部滑移分析
在发生背板翻转动作时,背部改变平躺姿态为坐姿,人体背部与背板表面会发生相对滑移,方向为自下至上,相反,当背板改变坐姿为平躺时,人体背部与背板表面的相对位移方向则会是自上而下。这种情况对于身体健康的人,则可在自身腰腹力量的作用下进行调整,而对于年老体弱残者,由于缺乏较强的腰腹力量,很难自行改变,且滑移情况会打乱其睡衣或床单的整洁性,从而使局部压迫感加重,在无护工帮助的情况下,将对病人的休息质量产生干扰。
因此,为进一步了解滑移的影响,本文分析了滑移量的变化情况。为确保数据真实可信,根据人体工程学,创建了抬背仿真运动模型,并参考我国成年人人体主要尺寸,对抬背动作进行了描述和修正。最终得出,仿真曲线与实测值基本一致。
2.背板滑移补偿方案
2.1旋转中心重合法
之所以出现相对滑移,是因为人体与床背板具有不相重合的旋转中心,因此,为了消除相对滑移,需采取措施,使二者的旋转中心重合。为确保背板与人体背部相对静止,且不妨碍其抬背动作,需改进抬背机构,改变铰链连接方式,确保在完成抬背运动的过程中,背板与人体背部以人体髋骨为旋转中心。为此,需采取以下两种措施,一是将旋转机构改变,执行抬背动作时,改变以往围绕背板与座板的铰链处进行旋转的方式,将髋骨中心作为旋转轴。二是使背板保持原来的铰接旋转方式,采取浮动式方案,设计背板的上表面和背部接触部分,当抬背时,浮动背板可跟随人体背部的运动情况,随之在一定范围内进行旋转,顺应人体位姿的变化情况,为确保背板与人体背部处于相对静止,需借助弹性装置,将背板上表面活动板与抬背机构进行连接。当进行抬背活动时,浮动背板可在弹簧的弹性变化范围内,随着人体背部的旋转情况,实时调整自身位姿,从而与人体保持相对静止。为完善该方案,需有效控制弹簧弹性模量,避免其过大或过小。
2.2主动补偿法
主动补偿法又称有动力补偿法,即将一层滑动背部添加到原来的背板上,借助伺服电机
的力矩,对滑动背板进行控制,使其与人体背部的运动情况相一致,避免人体出现相对位移。具体操作为将行程为150mm的丝杠滑轨机构,加入到背板与滑动背板之间,对抬背的角度数据进行收集,并将其作为滑动机构的输入信号,处理后,转换丝杠滑轨的运动状态,使其转变为滑动背板的直线滑移运动。在实施该方案时,需针对抬背运动和背板滑移运动,采取两个独立的动力控制系统,其难点为两组运动很难保持同步,需严格设计控制系统及信号采集情况,而且间断抬背和反复启停现象会严重影响该过程,从而无法掌控其补偿精度。
2.3被动补偿法
被动补偿又称为无动力补偿法,类似于主动补偿法,其采用的滑移补偿方式同样是借助一块固定板和滑动背板,不同点则是该方法不需伺服控制系统,可根据抬背旋转情况,遵循背板滑移运动规律,设置出一套相应的凸轮传动机构。为确保滑移运动与抬背运动同时进行,可根据抬背旋转角度的变化,对滑移距离进行控制。该方案在实施时,可通过抬背的旋转运动与直线运动的相互转换来进行,且不受系统反复启停的影响。
3.结语
综上,改进和创新抬背机构,具有较大的现实意义和理想价值,可改善传统机构在功能复合过程中的弊端,且可作为依据,供未来设计和改进护理床进行参考。此外,结合对背板滑移的探讨及设计的补偿方案,可极大的提升用户的舒适程度。而且西门子JACK人机工程仿真软件的运用,进一步彰显了其设计的人性化。此外,根据人机工程学创建机构运动模型,进而展开对抬背机构的运动分析,可作为参考依据,为该方案提供支持,进而推动对护理床的开发研究进程。
参考文献
[1]王学龙. 基于人体工程学的多功能护理床抬背机构的三维模型仿真设计[J]. 科技视界, 2018(11):15-16.
[2]秦帅华, 赵新华, 杨玉维,等. 多功能护理床起背机构创新设计及运动分析[J]. 天津理工大学学报, 2018, 034(002):1-5,11.
[3]胡木华, 刘静华, 陈殿生,等. 床椅一体化多功能护理床——实现卧床老人生活自理的梦想[J]. 机器人技术与应用, 2017(02):46-50.
作者简介:宋明玺(1999-02-19),男,汉族,籍贯:青海省海东市互助县,学历:本科在读

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



