四川城市职业学院,四川成都, 610020
摘要:码垛是工业机器人现场最典型的应用之一,工业机器人码垛在提升生产效率的同时能够完成恶劣的生产环境下的工作任务。因此,掌握合理的码垛编程方法具有重要意义。本文以长方体工件码垛为例,基于ABB的IRB120机器人,深入分析比较了两种不同码垛编程的位置计算方案。
关键词:工业机器人;码垛;编程
码垛编程是工业机器人编程与操作技术人员必须掌握的技能之一,但在实际应用过程中,可以通过多种不同的方案实现码垛任务,本文主要以长方体工件码垛为例,针对两种常见的码垛编程的位置计算方案进行了分析比较,帮助技术人员实习高效编程。
1. 长方体工件码垛任务分析
长方体码垛是工业现场最常见的码垛应用之一,为使垛型结构更规范、稳固,常常需要设置为奇偶层不同的排列方式,如图1所示。码垛任务要求为,当传送线上长方体工件到位后,机器人从原点出发到工件位置进行吸取,并将吸取的工件放置到码垛盘上,码垛形状如图1,每层5个工件,共10个工件,奇偶层排列不同,码垛结束后,机器人回到原点。
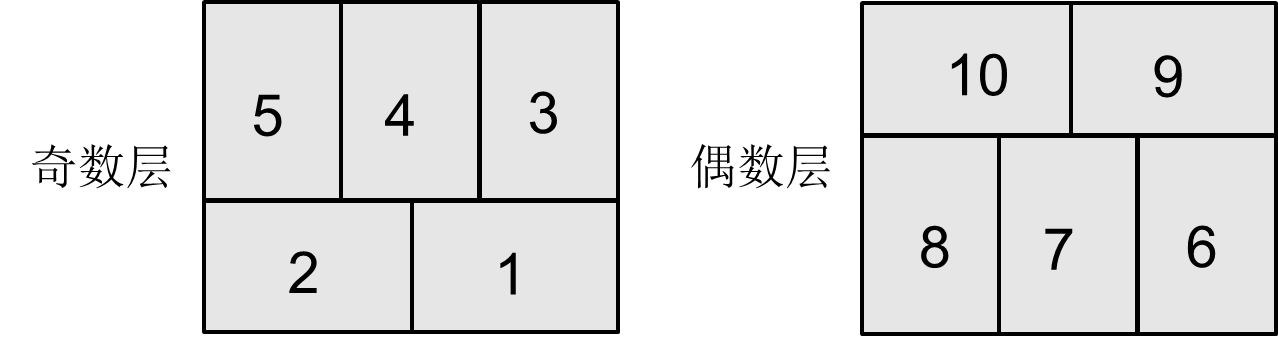
图1 长方体码垛排列要求
2. 基于TEST指令的码垛方案
TEST条件指令为码垛中常用的指令之一,可以通过判断码垛工件的个数ncount,确定码垛工件的放置点,分析长方体工件的码垛任务要求后可知,可以确定pBase1和pBase2两个基准点,其他点位通过偏移计算得出,具体位置计算程序如图3所示,其中长方体工件长为L,宽为W。
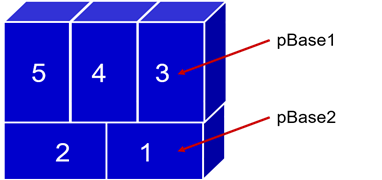
图2 选取两个放置基准点
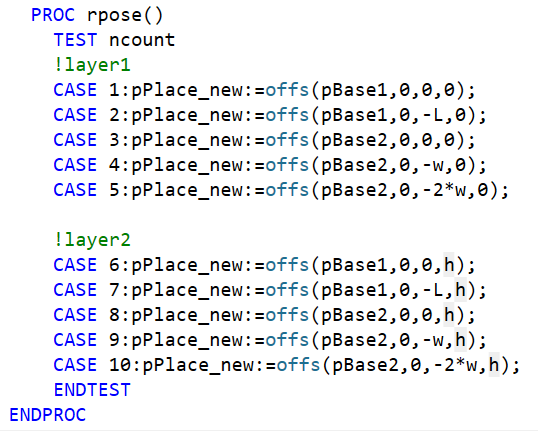
图3 基于TEST指令的位置计算程序设计
该方案的优点是TEST指令用法简单,程序结构清晰,易于学习和掌握。但缺点是若需要进行多层码垛,则需要编写多行程序,占用空间较大。
3. 基于数组应用的码垛方案
所谓数组,就是有序的元素序列,这和我们码垛产品有行有列的特性是一致的。由此,我们可以想到利用数组实行码垛工件位置的确定。在此方案中,我们只需要确定一个基准点pBase1,再结合Reltool旋转指令,将工件位置存于数组中,即可完成码垛位置计算程序,如图4所示。

图4 基于数组的位置计算程序设计
该方案的优点是程序简单,不受码垛层数限制。但缺点是需要理解数组的概念,同时只设一个点,需要进行复杂的位置偏移计算。
4. 结束语
本文通过基于TEST指令和数组应用的两种码垛编程位置计算程序的分析比较,总结了两种方案的优缺点,对于初学者可以先从TEST指令入手进行练习,该方法程序简单直观。对于需要多层码垛的情境则可以采用数组应用的计算方法,该方法更灵活快捷,但对技术人员位置计算能力要求较高。
参考文献
[1]叶辉,管小清.工业机器人实操与应用技巧[M].北京.机械工业出版社,2017:69-117
[2] 张洪森,赵玉红,刘添,黄锦波. ABB工业机器人码垛实现[J].工业控制计算机,2019,32(12):62-63
[3] 刘安军. ABB 工业机器人模拟码垛的实现[J].甘肃科技,2019,35(12):10-12
作者简介:任娇(1987.12-),女,汉族,四川武胜人,硕士研究生,讲师,研究方向:机电一体化。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



