青岛黄海学院,山东 青岛 266427
摘要:因每年落水溺亡人数的增加,设计开放海域智能救生装置,通过发射装置发射到水中,然后再利用人体红外感应和人脸识别定位落水者大致位置,再通过超声波测距协同控制救生圈调整营救方向。提供一种人机协同、精准施救、自动返航的水面救援装置,从而大大提高救援的安全性和效率。
关键词:发射装置;救生圈;超声波
一、引言
随着人口的增多和海边浴场大发展,溺水情况发生的也更加频繁。在未来随着超声波技术的发展,像此类可以准确找到溺水者位置、使用方便、成本低、普及率高的救援游泳圈将会在各种适合游泳的水域体现出自身优良的性能和极高的性价比。
二、功能概述
该救援装置主要是由发射装置、救援装置和动力装置等三部分组成。发射装置为手持枪型发射装置,以压缩空气为动力,将救生圈发射到距离溺水者较近的水中;救援装置由救生圈上的单片机控制多种定位装置和摄像头识别,同时进行定位和识别,保证定位的准确性,及时准确到达救援对象附近;动力装置采用双螺旋桨有利于调整方向,使救生圈的运动相对平衡,利于掌控。救生圈的形状设计为U型,流线型身躯减少了气体和液体带来的阻力,容易在水中穿行,救生圈上还设有把手,把手采用了搪塑材料,触感柔软,在U型救生圈的两端给有一个把手,在U内部还有一个把手,采用牛皮外表,而且内侧纹路还可以增大摩擦,溺水者抓住把手的时候更加省力安全。平时不使用的时候可以在岸边使用太阳能给蓄电池进行充电蓄能,实现节能。使用时,通过枪型发射器可以将压缩的救生圈从岸上发射到远处,再依靠自身的超声波和热释电红外传感装置搜索装置搜索溺水者和测量救生圈与溺水者的距离、依靠摄像头识别溺水者,最后确定溺水者的位置,然后由动力装置推动救生圈至溺水者的身边,救起溺水者后再自动返回最近的岸边,以便于救援人员的对溺水者的身体状况的检查,进行准确救援的救援游泳圈。
三、系统结构
1、工作原理及性能分析
自主定位救生圈如图1所示,包括圈体1,圈体1上设有定位装置和动力装置,定位装置连接于单片机2输入端,单片机2输出端与动力装置相连。定位装置和动力装置位于圈体1径向的两侧,定位装置包括设于圈体1上的超声波扫描仪和热释电红外传感器5。摄像头3用于识别溺水者,所述的摄像头3连接步进电机4,所述动力装置是设于圈体1上的双螺旋浆推进器7,所述动力装置包括双螺旋浆推进器7。超声波扫描仪和热释电红外传感器5将信号传递给单片机2,单片机2控制双螺旋浆推进器7发生旋转推动,圈体1朝向受害者,双螺旋浆推进器7给圈体1提供动力,驶向受害者,所述圈体1设有两个分布均匀的双螺旋浆推进器7,所述圈体1上设有径向对称的蓄电池6。
定位装置能够准确判断出受难者所在位置,并将信号传递给单片机2,单片机2将信号传递给动力装置,动力装置给圈体1提供动力,使圈体1驶向受害者。动力装置能够保持圈体1的平衡,并且方便圈体1转动方向。超声波扫描仪和热释电红外传感器5全角度视角内进行扫描,从而获取落水人员与救生圈的相对位置。步进电机4可以控制摄像头3的摆动,全角度视角内进行识别,可以获得溺水者的基本情况和大体位置。双螺旋浆推进器7通过控制转速调节推进动力,能够改变救生圈的前进方向。双螺旋浆推进器7类似于飞机航模上的无刷电机,通过电调控制,能为救生圈提供强大动力;外部管道防水,利用交换式挡板能够使无刷电机后部进风口通气正常但不会进水。由于救生圈较轻,双螺旋浆推进器7能够提供很强的动力,效率很高。蓄电池6能够提供电源,并且控制圈体1的平衡,两个螺旋浆推进器7转速的差异能够改变前进的方向,从而快速驶向落水人员。
当有人落水时,将多功能定位救生圈利用枪形发射装置发射到水中,步进电机4可以控制摄像头3的摆动,超声波扫描仪和热释电红外传感器5感受落水者的位置,并将信号传递给单片机2。单片机2将信号传递给动力装置,双螺旋浆推进器7给圈体1提供动力,使救生圈驶向溺水者,溺水者抓住救生圈上的把手8,从而幸免于难。
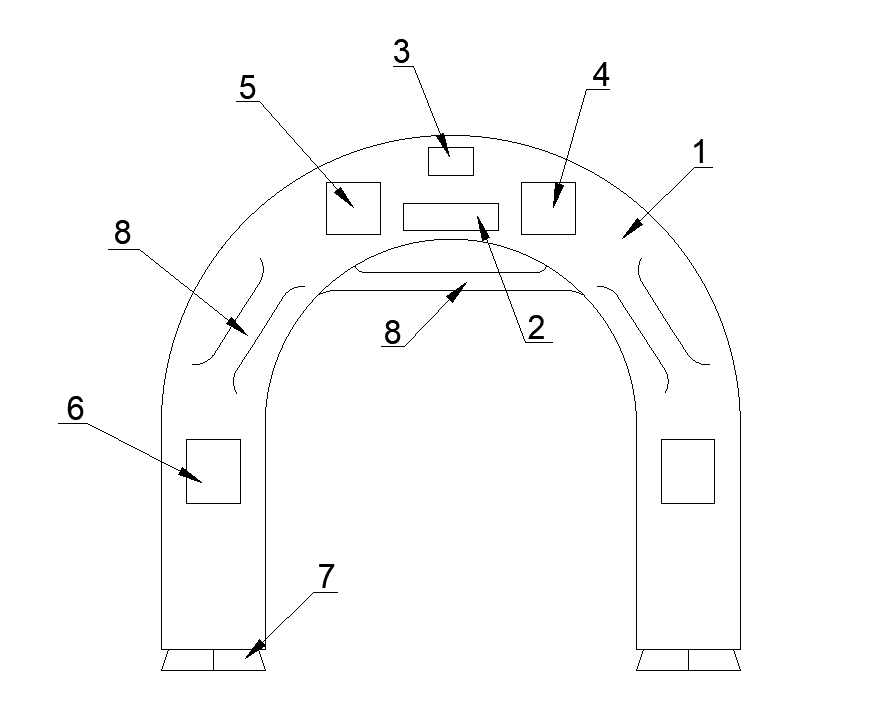
图1救生圈整体结构示意图
(1)救援装置。救援装置由单片机、超声波扫描仪、热释电红外传感器、摄像头和压缩U型游泳圈组成。发射装置将救援部分发射到就溺水者附近后,压缩U型游泳圈遇水充气,同时,超声波扫描装置发出超声波不断发出超声波确定溺水者具体位置,热释电红外传感装置不断感应溺水者是否在其感应范围内,摄像头监控溺水者的动向,并向动力系统发送数据。
(2)动力装置。两个小型螺旋浆推进器位于U型救生圈两端,在接受到救援部分给出的溺水者位置信号以后,会向溺水者的访问移动,并在合适距离停止工作,使溺水者可以用手抓到U型救生圈,从而达到救援目的。
2、总体设计方案
本多手段联合定位生命救援装置,包括救生圈、双螺旋浆推进器、太阳能板组、多种定位装置及控制系统等。
3、电气控制
电气控制部分主要采用单片机控制,由摄像头、超声波扫描仪和热释电红外传感器等采集输入信号传递给单片机,再发出指令控制救生圈移动。发射装置将救援部分发射到就溺水者附近后,压缩U型游泳圈遇水充气,同时,热释电红外传感装置不断感应溺水者的范围,全角度进行扫描,超声波扫描装置发出超声波不断发出超声波确定溺水者具体位置,摄像头识别溺水者,通过单片机向动力装置发送信号。
4、机械部分
由双螺旋浆推进器组成,两个小型螺旋浆推进器位于U型救生圈两端,通过控制转速调节推进动力,能够改变救生圈的前进方向,双螺旋浆推进器类似于飞机航模上的无刷电机,通过电调控制,能为救生圈提供强大动力;外部管道防水,利用交换式挡板能够使无刷电机后部进风口通气正常但不会进水。双螺旋浆推进器可以保持圈体的平衡,有利于其向各个方向转动,保证圈体的稳定性,在接受到救援部分给出的溺水者位置信号以后,会向溺水者的方向移动,并在合适距离停止工作,使溺水者可以用手抓到U型救生圈,从而达到救援目的。
四、结束语
本设计具有体积小、便携、实用、使用简单、操作方便、灵活、便利等优点。可以有效地对溺水者实施救援,及时的挽救溺水者的生命。我国有着十四亿人口,还有着漫长的海岸线,河流湖泊也众多,水位都比较深,且水下危险较多。这种情况下,国民失足落水的情况会非常得多,危险性不断提高,有的地方得不到及时的救援,是许多人的性命丢在了得不到及时救援上,这就需要一种便携、简单、节能、有效地一种救援设备来代替人工救生员,提高落水者的存活几率。
参考文献
[1]赵袁,魏静怡,董洪友.基于多元人物识别定位的智能救生圈[J].科技创新与应用,2020(09):29-30.
基金项目:2020年大学生创新创业训练计划国家级项目(S202013320008)

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



