上海盛图遥感工程技术有限公司 ,邮编 201803
摘要 水体的总体水质、污染、以及生态安全备受社会关注,如何快速、准确的筛选出问题河流尤为重要。上海市要求在2020年基本消除劣V类水体,日常监测采用基于地面的常规定点水质监测方法,要实现大范围水质监测,必然需要耗费大量的人力和物力,财力,而且全面监测一次时间周期很长。近些年来,随着成像光谱技术的发展,高光谱遥感数据的获取能力发展迅猛,空间分辨率和光谱分辨率都极大的提高。高光谱遥感可以获取地物丰富的光谱信息,具有宏观、大面积、波段多,获取影像周期快等优势,在水生态环境监测方面具有独特优势。通过地物光谱仪获取河道断面测点的光谱数据,通过研究水体反射率单波段、一阶微分以及波段比值和水质参数之间的关系,利用皮尔逊相关系数确定了敏感波段,建立溶解氧、高锰酸盐指数、总氮、氨氮和总磷的水质参数反演模型。通过低空无人机搭载高光谱成像设备,获取水体光谱信息,将处理后的光谱反射率代入水质参数反演模型,计算得出目标水体的水质参数,从而快速识别水体类型(I、II类、III类、IV类、V类、劣V类),以供管理部门对问题水体进行处置。在本次研究过程中,基于光谱特征(地物光谱仪、无人机载成像光谱仪)分类的中小河道水质参数反演精度均优于70%,水质类型反演精度均优于80%。
关键词:中小河道;航空高光谱遥感;水质类型;反演
清洁安全的水环境是人民健康生活的根本条件,是经济社会可持续发展的重要基础,也是上海实践生态文明、建设全球城市的重要保障。上海市中小河道整治已列入滚动实施环保三年行动计划,治理的目标是2017年底前,实现全市中小河道基本消除黑臭、水域面积只增不减、水质有效提升、人居环境明显改善、公众满意度显著提高,为2020年全市基本消除丧失使用功能的水体(劣于V类)打好基础。各个区的河道整治工作已有序推进,并取得了初步成效。
上海市大型河流(市管河流)采用基于地面的常规定点水质监测方法,可收集到长期水质监测数据。而中小河道众多,河网密布,其中大多数都是镇村管河道,缺乏长期的水质监测数据,水质污染来源更复杂,水质治理难度较大。单纯依靠地面船只采样分析监测水质,只能针对相对较大的河流开展常规监测。对于众多的中小河道,特别是郊区的部分中小河道难以实现定期采样分析监测。
高光谱遥感技术在水环境监测领域有着广泛的应用,高光谱有很多个波段,可以将不同的光谱特征提取分析,以区分不同水质,达到监测的目的。针对上海市中小河道治理的需求,本文提出构建一套以无人机高光谱遥感为主的空、地、水立体监测的技术流程。即基于卫星高光谱遥感数据、无人机高光谱遥感数据、地面光谱测量数据和水质监测站点数据一体化的上海市示范区中小河道水环境监测和反演算法流程。通过监测示范区中小河道水质类型,获得溶解氧、高锰酸盐指数、总氮、氨氮和总磷的浓度和所属水质类别。建立劣V类水的遥感识别方法,为实现全面消除劣V类水提供技术支持,该方法有望在上海市其它区域的中小河道水质监测进一步推广应用。
上海市中小河道众多,共有43000多条,宽度处在10m~200m之间,面对如此数量庞大的河道水质监测,传统通过化验监测的方法工作量大、效率低、且不能反映水环境的空间分布情况,针对上海市的中小河道治理的需求,拟通过遥感技术手段对研究区域内中小河道的水质状况进行监测,建立水质参数反演模型,获得溶解氧、高锰酸盐指数、总氮、氨氮和总磷的浓度和所属水质类别。通过实地考察,结合遥感的技术特点,考虑实际应用效率、河道宽度等因素,设计了不同的遥感监测技术方案,构建了一套以无人机高光谱遥感为主的天、空、地、水立体监测的技术流程,总体技术路线见图2-1。

图2-1 总体技术路线图
对于河道宽度大于50m的大型河道以及市管河道,研究建立了一种基于哨兵二号卫星遥感数据的多光谱遥感水质综合监测模型,对于河道宽度小于50m的中小型河道,采用基于无人机高光谱技术进行模型反演解算水质类型达到监测的目的。对于中小河道,首先需要通过地面实测光谱采集各水质类别典型水体光谱反射率,建立水质参数遥感反演模型,随后通过无人机高光谱成像系统获取目标水体光谱数据,对河道光谱影像进行处理,之后再基于地面靶标提取光谱特征,最后通过模型反演获取水质参数,从而进行水质类型的识别。
研究区为嘉定区安亭镇,河网密布,中小河道条段数占比96%。本文重点介绍无人机航空高光谱遥感在水质监测方面的研究与应用。
2018年9月-2019年5月先后组织7次野外光谱采集实验,在嘉定区和青浦区共采集57条河道,光谱测量采用的是美国ASD公司生产的FieldSpe4地物光谱仪,河道水体光谱采集按照《水体可见光-短波红外光谱反射率测量GB/T 36540-2018》规定的各项规范执行。
获得配套水质参数及水面光谱数据,去掉因为天气影响,光谱异常数据,以及部分配套水质参数测量有误差的测点数据,共采用81个测点的有效数据用于水质参数敏感波段选择及水质参数反演模型的建立。具体采集点分布(见图2-2-1)、采集时间以及采集的各类样本数量(见图2-2-2、表2-2-1)如下:
时间 | 地点 | 样本数 |
2018.9.19 | 嘉定安亭 | 14 |
2018.9.26 | 嘉定安亭 | 13 |
2018.9.27 | 嘉定安亭 | 13 |
2018.12.17 | 嘉定安亭 | 13 |
2019.4.12 | 青浦 | 11 |
2019.4.17 | 青浦 | 10 |
2019.5.22 | 嘉定安亭 | 7 |
| 合计 | 81 |

图2-2-1:采集点分布图 表2-2-1:采集时间与样本数量列表
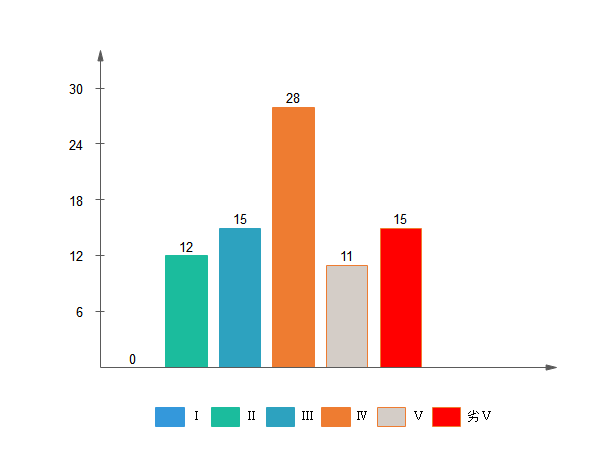
图2-2-2 采样点水质类型和数量分布情况
水体光谱反射率测量数据筛选步骤如下:
定性分析:对每次测量记录的各条水体目标和标准参考板对总太阳光的反射光谱曲线,进行量值大小和随波长变化形态的定性分析,选出疑似异常的反射光谱曲线;对疑似异常的反射光谱曲线分析各种可能原因,对原因明确,确认为异常的曲线予以筛除,并记录筛除原因。
对未筛除的数据做定量分析:计算该次测量水体目标和标准参考板对总太阳光的反射光谱平均值曲线和标准差曲线,若某条水体目标或标准参考板对总太阳光的反射光谱曲线偏离平均值曲线超出2倍标准差,判定该条曲线异常,予以筛除,并记录筛除原因;
对仍未筛除的数据做进一步定量分析:分别计算水体目标对总太阳光反射光谱曲线采集之前和之后的标准参考板对总太阳光的反射光谱平均值,若二者相对变化超过±2%,判定光照不稳定,该次水体光谱反射率测量数据整体无效,予以筛除,并记录筛除原因。
水体的光谱反射率受到水中所含溶解或悬浮物的影响,受污染水体所含的污染物浓度等有别于清洁水体,从而使水体颜色、温度、透明度表现出与清洁水体不同,造成太阳辐射能量的吸收和反射程度有所差异,反映在遥感影像上会表现为纹理、灰度,以及反射率的差别,因此可以通过对典型水体水质取样,对比分析同类水体样本的遥感影像特征,找到能够区分不同水质类型的波段或者波段组合,建立定性的识别模型或者定量的反演模型,以达到利用遥感手段监测水体的污染源、污染范围和污染程度等。
水体反射率整体偏低,实测水体的光谱反射率有两个比较明显的反射峰,在560~ 580nm附近是一个较宽的反射峰,在700nm处有一个较陡的反射峰,从580~700nm整体呈下降趋势。805~816nm附近为另一个较明显的反射峰,但该反射峰的光谱反射率值较前一个反射峰小。

图2-2-3 河道水面光谱反射率曲线
通过对采集的各类样本进行分析后发现,各个水质参数与单波段光谱反射率的相关系数均小于0.5(见图2-2-3)。
分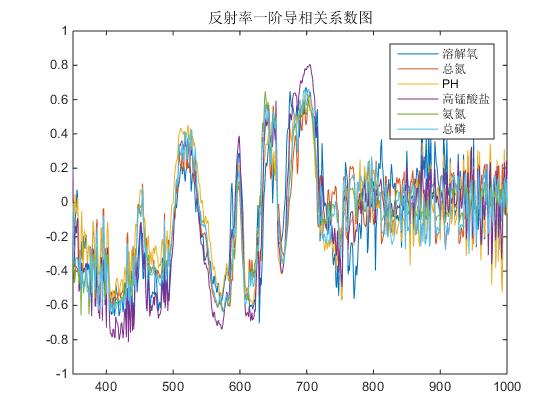 析各波段光谱反射率的一阶微分、波段比值与水质参数相关性较强,并且NH3-N、TP与TN三个水质参数之间的相关性强(相关系数>0.9)(见图2-2-4和图2-2-5)
析各波段光谱反射率的一阶微分、波段比值与水质参数相关性较强,并且NH3-N、TP与TN三个水质参数之间的相关性强(相关系数>0.9)(见图2-2-4和图2-2-5)
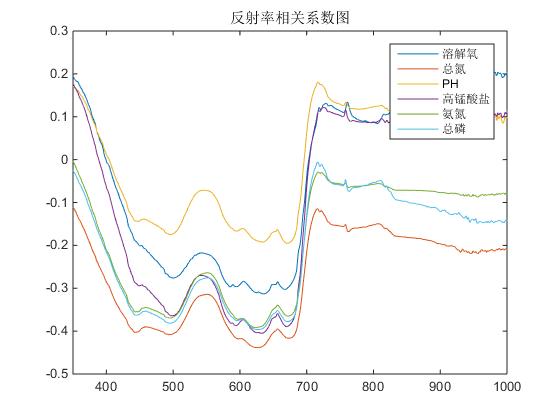
图2-2-4 水质参数与单波段反射率相关系数 2-2-5 光谱反射率一阶微分与水质参数
相关系数分布图图
将采集的光谱数据和水质数据划分为建模样本(59个)和测试样本(22个),使用建模样本建立了水质参数反演模型,使用测试数据对反演模型进行测试,测试结果如下(见图2-2-6~2-2-10):
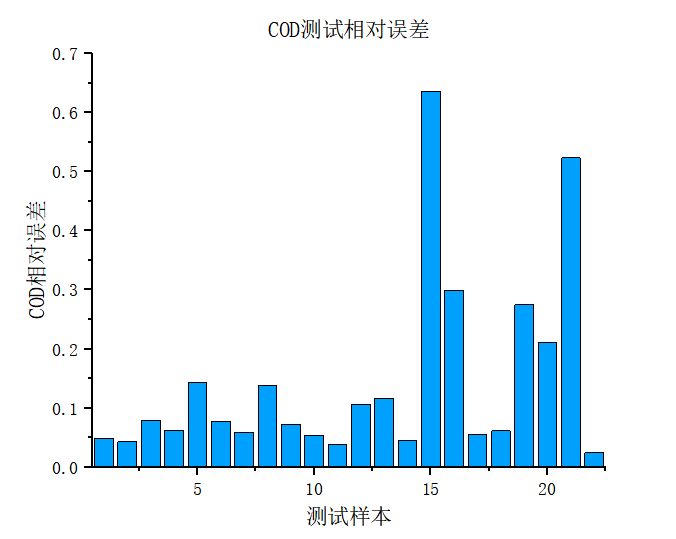
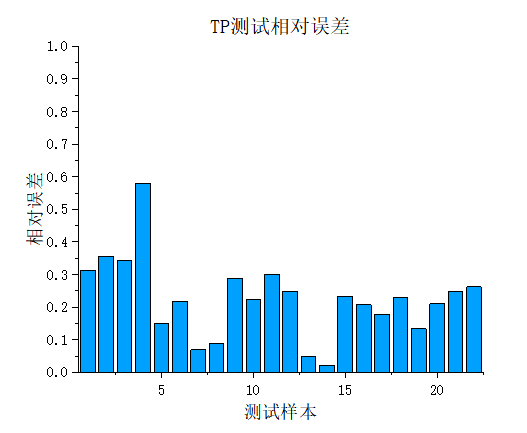
图2-2-6测试样本的高锰酸盐指数反演相对误差 图2-2-7测试样本总磷反演相对误差
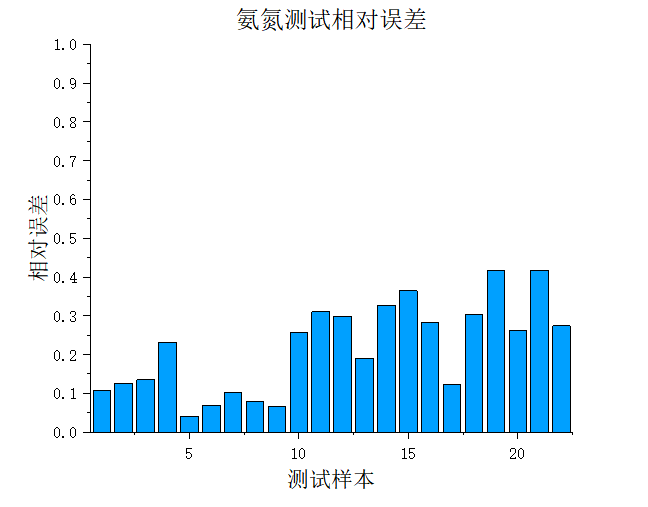
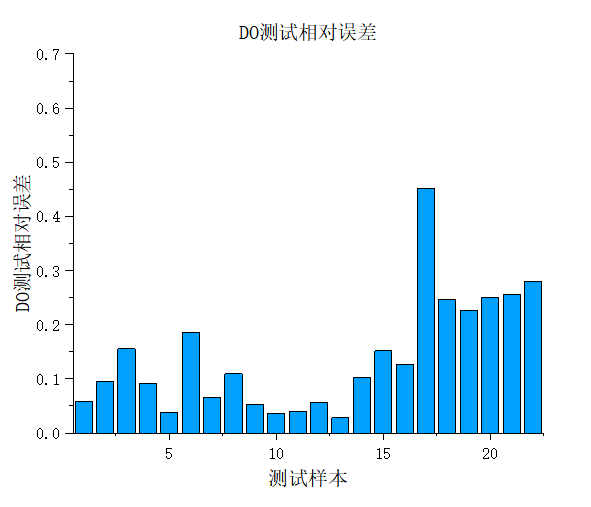
图2-2-8测试样本溶解氧反演相对误差 图2-2-9 测试样本氨氮反演相对误差
水质参数 | 平均相对误差 |
CODMn | 14.3% |
DO | 17.1% |
TN | 18.2% |
TP | 22.5% |
氨氮 | 25.7% |

图2-2-10 测试样本总氮反演相对误差 表2-2-2各水质参数反演模型平均相对误差
经过统计得到各水质参数反演的相对误差如表2-2-2:
从建模角度来看,CODMn、DO和TN三个水质指标的反演精度优于80%,TP和氨氮的反演精度优于70%,从单个水质指标的反演精度来看,绝大多数的水质指标的反演误差都小于30%,个别水质指标的反演误差大于30%,通过对这些误差较大的样本进行分析后认为造成这一现象的原因在于:1)溶解氧、高猛酸盐指数等随水质参数受气温影响较大,在一天之内可能具有较大幅度的变化,而水质参数改变引发的水体反射率变化较水质参数自身的变化具有滞后性,这种滞后性会导致一定程度的偏差;2)水是具有流动性的流体,水质参数的值会收水流,而真实采集时刻与光谱数据获取时间的不完全匹配也会导致误差增大。在后续的研究中将积累更多的测量数据对模型进行改进,提高反演精度。
先后于2018年9月19日、26日、27日和2019年5月22日开展四次飞行实验。实验采用的大疆M600 pro旋翼无人机,飞行高度飞行高度100m,幅宽84.8m,共获得有效河道高光谱数据20幅。低空无人机高光谱成像系统是一款基于小型旋翼无人机的高性能机载高光谱成像系统。系统由高光谱相机、稳定云台、高清相机、 POS模块、机载控制与数据采集模块、机载供电模块、地面站模块等部分组成。核心载荷高光谱相机完全自主研发,采用1英寸大靶面CCD图像传感器具有高光谱分辨率、高灵敏度、大视场及优异的成像性能,配合定制开发的高性能稳定云台,能够有效降低飞行过程中无人机抖动引起的图像扭曲与模糊。
表2-3-1 主要技术指标
序号 | 指标 | 参数 | 备注 |
1 | 光谱相机光谱范围 | 400-1000nm | / |
2 | 光谱相机光谱分辨率 | 优于2.3nm | / |
3 | 光谱相机空间分辨率 | 0.9mrad | 35mm镜头 |
4 | 光谱相机空间通道数 | 480/960 | 4像元合并/2像元合并 |
5 | 光谱相机光谱通道数 | 270 | 4像元合并 |
航空高光谱遥感的数据处理包括辐射定标、几何校正、反射率计算、图像预处理、河道提取、水质参数反演和水质类型识别。具体流程图如下图2-3-1:
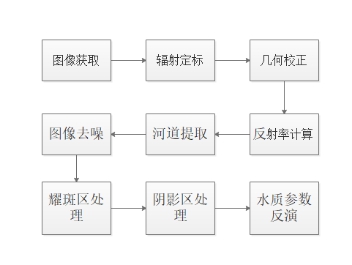
图2-3-1 航空高光谱图像数据处理流程图
获取的原始的无人机光谱影像数据上的像素值不能直接应用,由于无人机飞行高度低,受低空气流影响,影像几何畸变大,因此需要对目标水体各个位置以及地面靶标的辐亮度进行计算并进行几何校正。利用成像光谱仪自带的定标文件进行辐亮度的计算,再利用无人机姿态控制系统的POS信息进行几何校正。
利用地面靶标的辐亮度和反射率,计算得到各波段下目标水体的反射率。为了验证ASD测量得到的辐亮度和图像上的辐亮度的一致性程度。需要将辐射校正后的辐亮度与地面光谱仪的辐射亮度进行比较,验证了一致性以后,基于经验线性校正(Empirical Line)模型进行无人机高光谱图像反射率转化。
基于经验线校正模型方法是假定在成像过程中,图像的像元DN值与反射率之间存在线性关系。
反射率= 增益×DN值+偏置 (式2-3-1)
即利用两个已知点的地面反射光谱值,再计算图像上对应像元点的平均DN值,然后利用线性回归求出增益和偏移值,建立DN值与反射率之间的相互关系式,进行反射率传递。这种方式需要借助至少两个已知的地物目标的反射率,为此在无人机起飞前,在地面均匀摆放不同颜色的靶标,如图2-3-2。
在高光谱图像上读取各靶标区域的平均DN值,结合各自对应的实测反射率,使用最小二乘法求解得到增益系数K和偏置B,图2-3-3是高光谱图像上的各靶标区域以及采用经验线校正求得的各波段得增益和偏置。
图2-3-2无人机遥感图像上靶标区域

图2-3-3 各波段增益(左)和偏置(右)
在计算得到增益和偏置以后对整幅图像进行经验性校正,可得到各波段的反射率图像,得到各地物的反射率如图2-3-4:
 图2-3-4 典型地物反射率(左中右分别对应地物分别为水体、道路和树木)
图2-3-4 典型地物反射率(左中右分别对应地物分别为水体、道路和树木)
使用红色靶标和灰色靶标的ASD实测的真实反射率以及实测的水体反射率来验证反射率图像的准确性,具体结果如图2-3-5至图2-3-7:

图2-3-5 红色靶标反射率测试(左)及相对误差(右)

图2-3-6 灰色靶标反射率测试(左)及相对误差(右)
图2-3-7 水体反射率测试(左)及相对误差(右)
从上述三组图像中可以看出,在400nm~900nm波段范围内,两端的相对误差较大,在450nm~750nm之间的相对误差较小,因此采用经验性模型能较好地进行反射率转换。
在反射率图像上将河道区域提取出来不仅能有效减少后续处理的计算量,还可以降低其他地物对河道区域的影响。河道提取的具体流程是首先运用波段运算计算归一化水体指数(NDWI),随后对NDWI进行滤波处理消除噪声,再使用K-means进行聚类得到河道区域,聚类后的结果可能存在一些小空洞,可采用bwareaopen方法进行去除,即计算各个闭合区域的面积,将面积小于阈值的小区域置为背景(图2-3-8)。

图2-3-8河道提取图像(从左至右分别是河道彩色图像,去噪后的NDWI,二分类后的河道图像,消除小的噪点的河道图像)
获得水体的高光谱图像后不能直接进行应用,还需要进行预处理操作。高光谱图像的预处理包括图像去噪、阴影区域去除和耀斑区域去除三个方面。由于水体属于低信号目标,自身反射能量偏低,因此在使用图像前需要进行去噪,首先使用中值滤波去除图像上的椒盐噪声,随后再对处理后的图像采用高斯低通滤波进行处理,图像去噪能有效抑制和消除图像噪声,提高图像信噪比以及改善模型精度。
耀斑区处理。无人机成像时刻水面可能会有强烈的太阳直射光,水体耀斑会使得图像全波段的反射率有较大幅度的增加,采用最大类间方法阈值法能有效提取耀斑区。考虑到水体具有空间连贯性,因此采用非耀斑区的反射率平均值来替换耀斑区的反射率值。
阴影区处理。阴影区处理方法与耀斑区类似,基本流程也是通过按照最大类间方差法提取阴影区,随后将非阴影区的平均值替换阴影区的反射率值。
完成数据预处理后,即可使用构建的水质参数模型反演水质参数,以下以嘉定区嘉朱公路桥附近河道为例,展示各水质参数浓度分布图(图3-1-1~图3-1-4)。


图 3-1-1 CODMn浓度分布图(单位:mg/L) 图3-1-2 DO浓度分布图(单位:mg/L)
3-1-1 CODMn浓度分布图(单位:mg/L) 图3-1-2 DO浓度分布图(单位:mg/L)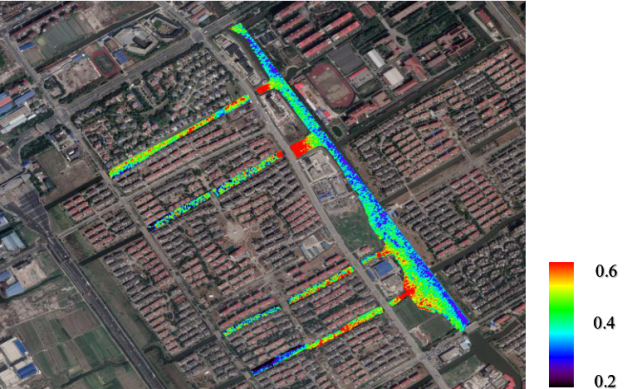
图3-1-3 氨氮浓度分布图(单位:mg/L) 图3-1-4 TP浓度分布图(单位:mg/L)
在开展低空飞行实验的同时,地面同步采集了7个断面的水质数据进行精度验证,将反演图像上对应位置的数值和实测数值进行比较,水质指标类型根据地表水环境质量标准(GB3838-2002)-几点几,水质指标超过V类标准的均属于劣Ⅴ类,因此最终的反演精度验证结果如下表:
表3-2-1 实验区河流反演精度表
水质参数 | 河道名称 | 孙浜 | 庙泾 | 南庙泾 | 陆茜泾 | 张家泾 | 王家泾 | 黄胖泾 |
CODMn | 真实值/反演值 | 4.4/5.22 | 5.6/5.51 | 5.6/5.26 | 4.9/5.47 | 7.3/6.82 | 8.8/7.59 | 6/5.56 |
真实类别/反演类别 | Ⅲ/Ⅲ | Ⅲ/Ⅲ | Ⅲ/Ⅲ | Ⅲ/Ⅲ | Ⅳ/Ⅳ | Ⅳ/Ⅳ | Ⅲ/Ⅲ | |
DO | 真实值/反演值 | 7.5/7.44 | 7.6/7.71 | 8.5/7.87 | 7.6/7.94 | 8.3/8.12 | 12.3/10.56 | 8.6/7.69 |
真实类别/反演类别 | Ⅰ/Ⅱ | Ⅰ/Ⅰ | Ⅰ/Ⅰ | Ⅰ/Ⅰ | Ⅰ/Ⅰ | Ⅰ/Ⅰ | Ⅰ/Ⅰ | |
TN | 真实值/反演值 | 2.12/2.33 | 1.86/1.77 | 1.66/1.88 | 1.79/1.65 | 2.14/2.23 | 1.99/2.18 | 2.62/2.43 |
真实类别/反演类别 | 劣Ⅴ/劣Ⅴ | Ⅴ/Ⅴ | Ⅴ/Ⅴ | Ⅴ/Ⅴ | 劣Ⅴ/劣Ⅴ | Ⅴ/劣Ⅴ | 劣Ⅴ/劣Ⅴ | |
氨氮 | 真实值/反演值 | 0.774/0.68 | 0.205/0.171 | 0.29/0.256 | 0.645/0.746 | 0.335/0.402 | 0.388/0.333 | 0.506/0.647 |
真实类别/反演类别 | Ⅲ/Ⅲ | Ⅱ/Ⅱ | Ⅱ/Ⅱ | Ⅲ/Ⅲ | Ⅱ/Ⅱ | Ⅱ/Ⅱ | Ⅲ/Ⅲ | |
TP | 真实值/反演值 | 0.162/0.242 | 0.134/0.145 | 0.125/0.175 | 0.119/0.104 | 0.214/0.237 | 0.256/0.235 | 0.178/0.155 |
真实类别/反演类别 | Ⅲ/Ⅳ | Ⅲ/Ⅲ | Ⅲ/Ⅲ | Ⅲ/Ⅲ | Ⅳ/Ⅳ | Ⅳ/Ⅳ | Ⅲ/Ⅲ |
表3-1-1 各个水质参数的平均反演精度和平均类别精度
水质参数 | 平均反演精度 | 平均类别精度 |
CODMn | 90.6% | 100% |
DO | 94.1% | 85.7% |
TN | 91.8% | 85.7% |
氨氮 | 83.1% | 100% |
TP | 79.7% | 85.7% |
通过比较地面同步采样以及图像上相应位置的反演值后发现CODMn、DO值以及TN三个水质参数反演精度较高(均大于90%),同时各水质指标的类别精度均大于85%,反演的水体类型与实际水质类型误差不超过一类。
利用无人机航空高光谱遥感是目前水环境研究的热点,其优点是数据获取便利,天气条件和飞行条件允许,可随时获取研究区图像数据。对中小河道进行水质监测,该技术路线可行、方法实用,有效的提高了城市中小河道水质监测效率。为水利、环保行业提供了先进的水质监测技术和方法。
当前高光谱遥感技术的发展也面临获取冗余量大、背景与应用变化时载荷指标不能动态调整、信息提取与信息服务时效性有待提高等问题。建议提高建模样本和测试样本数量提高模型可靠度,开发成熟可信的算法模型、软硬件结合的数据处理软件从而形成更先进、更有效的高光谱图像处理与信息提取方法和流程,为高光谱遥感的商用化、普及化发展提供支撑。
参考文献
[1] 高兵.高光谱图像处理与信息提取前沿[R].遥感学报,20166179
[2] 巩彩兰,尹球,匡定波.航空高光谱遥感数据用于江河水质分类研究[R]
[3] 林剑远,张长兴.航空高光谱遥感反演城市河网水质参数[R] 遥感信息,2019
7

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2025 期刊网(www.qikanchina.com) 琼ICP备2021005105号



