广州地铁集团有限公司 广东 广州 510000
摘要:轨道智能巡检系统主要针对轨道存在的钢轨表面擦伤、扣件异常、轨枕掉块、道床裂纹及线路有异物等现象进行检测,分为图像采集、图像分析、数据管理3个模块,本文参照目前现有巡检技术提出相应的技术需求以及实现方式,主要介绍车载轨道智能巡检实现原理,以广州地铁车载巡检系统为例阐述目前现有的轨道智能巡检设备实施原理。
关键词:车载;智能巡检;线路;轨道病害
1 引言
由于人工巡检耗时、低效、主观性强,已不能满足现代轨道交通更快、更准、自动化的检测需求,且巡检工作一般在夜晚进行,存在安全隐患。轨道检测系统可以从根本上解决这个难题。在普通列车车底安装检测设备,在列车运营过程中完成轨道图像数据的采集。该系统以人机结合的方式实现全面检和重点检相结合,利用轨道结构规范统一、固定的特点,采用机器视觉检测及图像识别比对技术,提高了轨道隐蔽性异常状况的发现能力和故障初期的预警能力,增强了轨道线路的安全防范水平,同时降低了养护维护成本。
2 实施原理
2.1高速高清图像采集技术
轨道智能巡检系统采用线阵相机单元采集轨道线路钢轨两侧、扣件、轨枕、道床等部件图像。高速采集高分辨率图像对传输速度提出更高要求。
巡检系统采用传统的图像采集处理传输技术,对数据通道带宽及系统运算处理能力都有很高的要求,在采集存储过程中会出现数据溢出、阻塞、丢包等现象,易造成系统运行不稳定。
巡检系统采用了嵌入式图像压缩处理技术、新型内存管道技术、硬盘内存二次映射技术以及多线程并行处理等最新的高速处理、存储技术。系统首先通过嵌入式图像压缩处理技术在前端完成了图像数据压缩,其次通过新型内存管道技术构建数据通道,然后利用硬盘内存二次映射技术建立数据缓冲区,采用多线程并行处理对多路相机数据同时进行处理,提高数据处理速度。
2.2异常图像识别报警技术
2.2.1模糊算法
模糊算法属于智能算法,当我们对于系统的模型认识不是很深刻,或者说客观的原因导致我们无法对系统的控制模型进行深入研究的时候,智能算法常常能够起到的作用很小。这个时候就需要用到模糊算法,常见的模糊算法有均值模糊、高斯模糊等。
2.2.2神经网络技术与模糊算法结合
系统采用先进的神经网络技术对目标图像进行深度学习,系统可自动识别目标部位的异常状态,并报警提示。系统采集到轨道图像后,先对图像上的关键结构部位进行定位,再利用分类器算法对定位区域进行分类,对分类结果进行判断,是否存在异常。针对图像定位策略,为兼顾准确性和效率,系统采用算法综合评定的方式对轨道关键结构进行定位,先采用深度神经网络定位算法对相机采集到的第一帧图像进行识别定位,该算法定位准确,但计算量大,耗时长,效率较低;故后续采集图像采用模糊算法进行跟踪定位,运行效率高。通过两种定位算法相互结合,可实现对轨道关键部件的快速、准确定位,兼顾准确和效率的平衡。
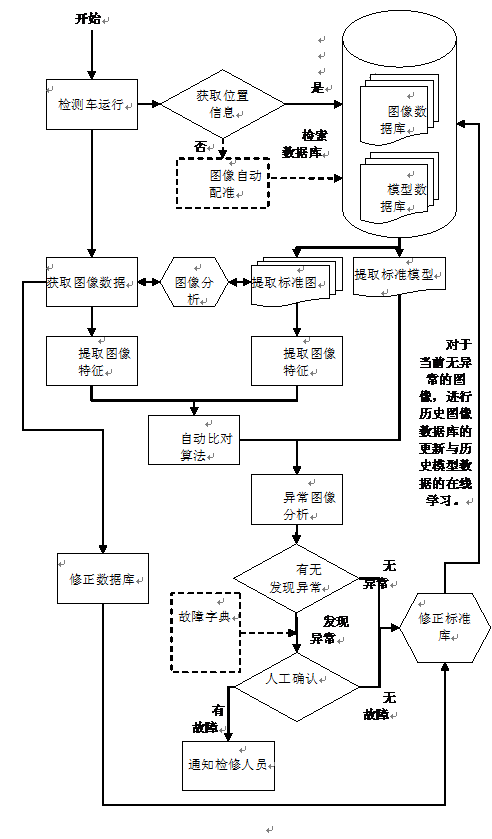
图1异常图像报警算法流程图
该神经网络的优点是定位准确,鲁棒性好,但是计算量大,因此第一次定位到感兴趣的区域后,使用KCF(核相关滤波算法)用于图片的跟踪,该算法主要是使用给出的样本去训练一个判别分类器,判断跟踪到的是目标还是周围的背景信息。主要使用轮转矩阵对样本进行采集,使用快速傅里叶变化对算法进行加速计算。
对跟踪到的各个区域,使用SVM(支持向量机)算法判断扣件异常,异物入侵等预警信息。SVM算法的思想是给定给一个包含正例和反例的样本集合,SVM的目的是寻找一个超平面来对样本根据正例和反例进行分割。异常图像报警算法流程图1。
2.2.3深度学习
深度学习是机器学习领域中一个新的研究方向,它被引入机器学习使其更接近于最初的目标——人工智能。
深度学习是学习样本数据的内在规律和表示层次,这些学习过程中获得的信息对诸如文字,图像和声音等数据的解释有很大的帮助。它的最终目标是让机器能够像人一样具有分析学习能力,能够识别文字、图像和声音等数据。 深度学习是一个复杂的机器学习算法,在语音和图像识别方面取得的效果,远远超过先前相关技术。
2.3里程定位技术
同步定位系统可有三种方式进行定位,可结合现场实际情况选用。
2.3.1车辆测速设备
选用车辆本身的速度数据,数据通过MVB网络接口传输数据,从车辆获取速度信息的要求。或者采取采用轴端磁性测速传感器,通过测量车轮转速确定实际车速从而获取速度定位信息。
2.3.2定位设备
主要采用电子标签和射频读卡器,车辆安装射频读卡器,线路上按里程分段布置电子标签,当车辆形式经过电子标签,利用射频读卡器即可读取电子标签内预设的里程信息。
2.3.3 GPS
采用工业高精度GPS导航模块,用于列车隧道外部运行时的粗定位,GPS的定位精度可到5米。
3 在运营车辆改造
目前地铁行业中,轨道智能巡检系统在线网中应用尚未成熟,无法实时监测现场轨道情况,本文主要介绍广州地铁XX线路运营车辆加装智能巡检设备的技术要求与实现方式,计划在120km/h的电客车上安装智能巡检设备,地铁运营期间电客车在线巡检,对轨道病害故障进行自动识别并同步无线传输报送故障信息。
3.1技术要求
3.1.1图像像素:不低于2K。
3.1.2适应车速:0~120km/h
3.1.3定位误差:0~10m,测速误差:小于2km/h。
3.1.4图像分辨率横向1mm/pix,纵向1mm/pix。
3.1.5裂纹识别精度: 1.5mm以上。
3.1.6故障识别率:缺陷初始识别率不低于80%。通过深度学习,缺陷识别率达到95%以上。
3.1.7防护等级IP67
3.1.8采样间隔:≤1mm,且能自动根据运行速度调整触发频率。
3.1.9道床需覆盖整截面及水沟,至少3000mm范围。
3.2 实现方式
车载轨道智能检测系统由车底检测设备、车内分析服务器、地面数据分析终端、里程定位系统和车地通信设备组成,如图2所示。图像识别功能如图3所示。

图2 智能巡检系统实现方式图
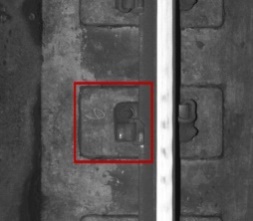
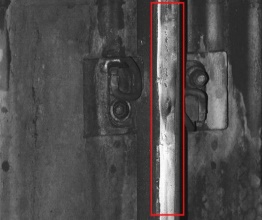
图3 报警效果图
3.2.1车底设备
安装车底数据采集分析设备(含高清线阵成像单元、激光灯、防护设备、采集处理装置、图像处理识别装置、无线传输装置),这部分为整体装置最重要的组成部分,对线阵相机分辨率要求较高,线阵相机的采集频率需与速度匹配,保证图像像素。
3.2.2车内设备
车内分析服务器(含数据处理工控机以及服务器),主要是对采集的数据进行分析处理。
3.2.3终端
通过车辆现有的车地网络将数据传输到终端。
3.2.3.1终端操作平台可对故障照片查询和放大。查看故障统计报表。
3.2.3.2统计异常数据及数据区间分布情况,从大量数据中提取有价值信息。分析周期内所有数据,预测故障发生,为智能运营“线路状态修”奠定大数据基础,提高提前发现故障能力。
3.2.4安全评估
在电客车加装设备,车辆安装空间受限,需考虑巡检设备安装以及走线位置,综合因素较多,最终上线需进行一次完整的安全评估。
3.2.4.1静应力分析
主要对设备施加水平加速度、横向加速度以及垂向加速度进行有限元分析,如果车底数据采集分析设备主要结构最大静应力小于使用材质的屈服强度,则满足安全使用要求。
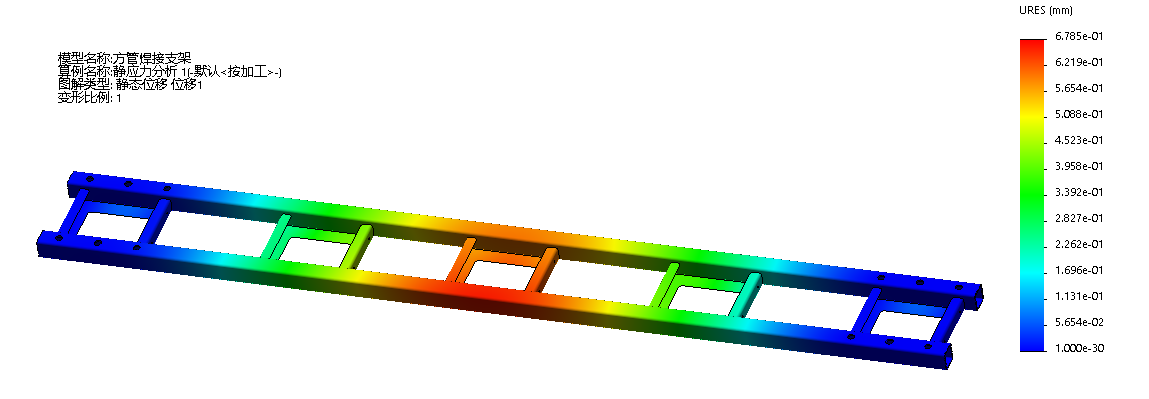
图4 静应力分析
3.2.4.2疲劳验算
对设备施加往复荷载,在列车振动情况下保证车底设备需稳固可靠。
3.2.4.3二次防脱
设备螺栓需做好二次防脱,保证电客车安全运行。
4 结论
4.1 随着技术的发展及智能运维需求的提出,车载轨道智能巡检技术应运而生。为地铁轨道基础设施外观状态检测提供了先进、自动化的手段。检测技术自动化程度高,提升线路巡道作业效率,优化线路巡检周期和作业时间,达到节省人力、智能巡检的目的。
4.2安装在电客车每天全线巡视,采用先进、自动化手段,其故障识别率可达95%以上,且覆盖面广,可实时在线监测、实时报送故障信息,使得故障得到及时处理。提升了设备运行可靠性、安全性,进而提高服务水平。
4.3巡检系统对周期内所有数据进行智能分析,可预测故障发生,为智慧运营“线路状态秀”奠定大数据基础,提高提前发生故障的能力。
[1]张晖,杨晓衡,臧彦廷.基于轨道式机器人的输煤皮带智能巡检监测系统的研发与应用[J].电力设备管理,2020(10):189-191.
[2]张钢, 轨道型智能巡检(视 )机器人系统. 天津市,天津博宜特科技有限公司,2020-05-20.
[3]马臣希,张二永,方玥,韩强.车载轨道状态巡检技术发展及应用[J].中国铁路,2017(10):91-95.
[4]聂海丽.车载智能轨道巡检系统的研究与应用[J].上海铁道科技,2013(01):33-35.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



