安徽理工大学 安徽省淮南市 232000
摘要:一般直流电动机调速均采用典型的PID器调速,但由于其具有不自适应性,在调速参数变化时,不能保证电机在高速和变速的过程中的稳定性和高精度。现设计一基于arduino芯片为核心的具有自适应的模糊PID调速器,不仅运行简单,还能够改善直流电机在高速运转时的稳定性。
关键字:Arduino 模糊PID 直流电机调速
0引言
由于直流电机控制简单,效率高,所以在大多工业生产中应用广泛。但在直流电机调速中,由于参数改变,电机往往在高速运转中难以稳定,传统的PID控制也具有这个缺陷。本文设计一个基于Arduino的模糊PID直流电机调速系统,利用Arduino的多功能性,外加自适应模糊PID算法相结合,创建智能,数字化的系统来实现直流电机的高精度调速。
1.驱动电路
电机在工作时候的电压和电流远高于Arduino开发板的输入输出电流电压,因此驱动电路需要通过驱动芯片来控制。本次设计选择的驱动芯片为L298N双H桥驱动电路控制芯片单元。其中驱动控制芯片L298N的逻辑如下图所示,其功能逻辑通过两个端口输入共同实现。

图1-1 L298N功能逻辑图
本次设计选用的L298N的芯片引脚功能设置如下:OUT1-4端口设置接入步进电机或直流电机,5脚、7脚、10脚、12脚接入控制电平,对电机进行变速、正反转等功能的控制。而ENA和ENB分别控制电机的启停,作为控制芯片使能端来使用。其引脚分部如图1-2所示。

基金:大学生创新创业训练项目(批准号:S202010361117)
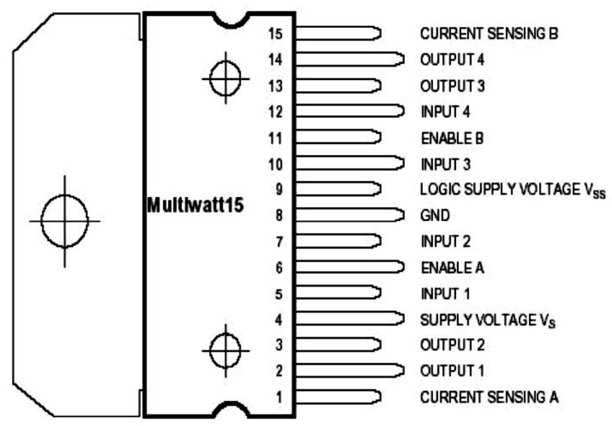
图1-2 控制芯片驱动电路引脚分布图
2.控制电路
基于上述原则和控制功能,结合Arduino开发板设计实现了具体的硬件电路,其设计图如图2-1所示,功能阐述如下:首先通过开发板测取电机数据到处理器中,通过提前编程的算法进行指定逻辑的分析处理过程,然后将信号返回到驱动电路上,驱动电路通过预置的控制逻辑实现相关功能。
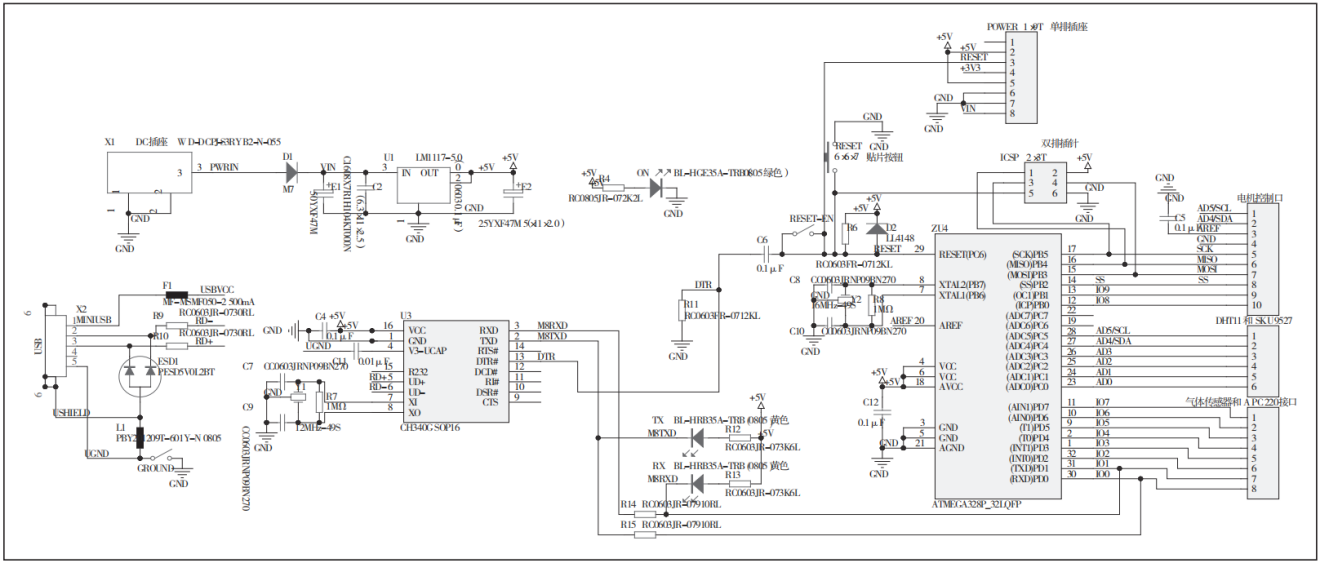
图2-1 控制电路硬件设计图
3.模糊pid控制
基于上述控制逻辑和所要实现的功能目标设计模糊PID控制算法如图3-1所示。这种pid控制算法的主要特点是相比常规的pid控制算法,增设了一个模糊控制环节,通过电机额定转速与实际转速的转速差进行输入误差函数,将误差变化率引入pid控制环节进行控制,因此可以对pid的比例系数、积分系数和微分系数都进行修正,从而满足抗扰动的设计要求。
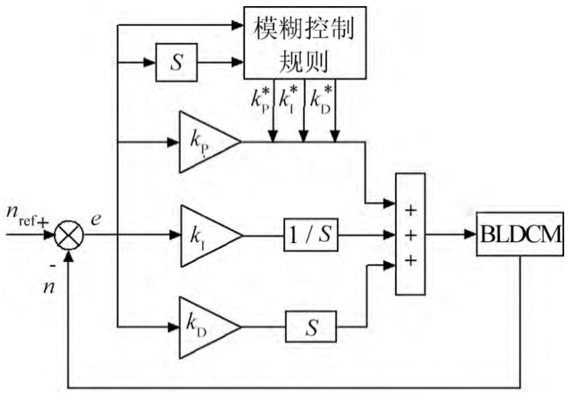
图3-1 模糊PID控制流程图
4.结束语
本研究设计的是一种以arduino为控制芯片的直流电动机调速系统,并加入了模糊PID控制,利用模糊控制原理对PID参数进行自调节。与传统的PID控制相比,模糊PID控制的优点更加明显,可以解决控制中的非线性和滞后性的问题,有较强的容错能力。
参考文献:
李阳,娄建安,李川涛,余建华. 直流无刷电机容错控制系统设计 与实现[J]. 计算机测量与控制,2013(12)
张天鹏,徐磊.L298N 控制直流电机正反转[J].工业设计,2011(3): 98~99.
周晓华,张银,王荔芳,等.无刷直流电机调速系统模糊神经 元 PID 控制[J].现代电子技术,2017( 12) : 140-143
刘兴艳,上官璇峰,董洋洋,等.基于 P -模糊自适应 PID 控制的无刷直流电动机调速系统[J].工矿自动化,2010 ( 7) : 45-47
Richard Blum.Arduino 程序设计指南[M].北京:电子工业出版 社,2015:203-208.
姚汉.Arduino 开发实战指南--STM32篇[M].北京:机械工业出版 社,2014:99-102.
1

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



