引言 建国以来 ,随着我国人们休闲生活品质水平的不断提高 ,旅游业逐渐逐步发展壮大成为一个全球最大的旅游新兴产业之一,甚至已经远远超过美国石油和通用汽车等化工业 ,成为一个世界第一大新兴产业。在此背景下 ,环卫工人的死亡率高达 1.35‰,超过美国的 1.1‰的最高职业死亡率 ,更超过美国最危险职业——伐木工人的死亡率。目前 ,清理通过手持式网兜等传统工具对小型水域水面漂浮物的打捞 ,总是出现小型漂浮物无法打捞或者打捞不上来,从而产生没有打扫的错觉,水面的环境令人担忧。该设计能够解决小型水域垃圾难捕捞、清理不净问题,对于校园、小区、旅游景点等均可使用,解决了由于垃圾处理不到位或者无法处理而引起环境污染、水体破坏的问题,有效解决了小水域内近远程作业问题,靠船体本身自动化实现对水面漂浮物将其聚集、收拢、运送、装载,全过程无需人工,不对环境造成污染,有效的提高了作业安全性和作业效率。 1硬件系统设计 STM32F103RCT6作为专用主控控制芯片, LM2596和本系采用新的 LM1117-3.3作为稳压电源输出控制电路芯片。 LM2596是 5v直流输出开关型稳压电源输出控制电路芯片 ,输出电压输入较大电流时的最大功率可达 3a。 LM1117-3.3输出 3.3v直流输出输入电压为整个数控单片机稳压电源电路供电 ,控制系统结构图及软件设计框图及其可靠性参见系统软件结构图 1。 图 1硬件系统原理框图 1.1自动返航系统 建立训练集和测试集,通过里面的图片对摄像头训练,进行梯度优化及学习率优化,使得摄像头在波光粼粼的湖面也可以实现对漂浮物的识别。通过摄像头训练建立上位机,当摄像头视野内出现漂浮物时,返回坐标值给单片机,单片机接受到反馈信号,驱动螺旋桨,进行回收,当垃圾收集箱满后可以发送信号给上机位,实现自动返航。 [1]
1.2基于 MaixPy平台的快速识别系统 通过 MaixPy平台对搭载 K210芯片的摄像头进行模型训练。根据不同的塑料瓶设定不同的阈值,并记录下来。通过不断的向摄像头喂送照片,设定出阈值范围,实现对不同大小形状的塑料瓶进行快速识别。 [5] 2 机械结构设计 该设计的机械结构部分设计主要有基于 SolidWorks软件三维模型的完成。整体采用双船体设计,放置太阳能电池板,安装螺旋桨等设备,实现多功能集于一体,这样的设计不仅外观符合人体美学,而且分布合理,有利于船在水中的平稳运行。 2.1基于 SolidWorks软件三维模型的设计 船体采用双船体结构设计,可同时向上放置两块太阳能动力电池板 ,安装动力螺旋桨、动力系统、遥控导航系统、传感器等系统,同时船体下方安有双螺旋齿轮,在实现推进差速式急转弯的同时保持更好地运行稳定性,同时克服双船体功耗较大问题,在船体上设有综合锂电池和综合太阳能系统,保证了实综合高效节能利用 ,满足为清洁能源的高效消,如图 2.
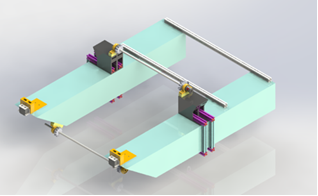
图2 双船体设计
2.2太阳能自动追光系统设计
为实现太阳能能源的高效利用采用自动追光系统,采用一种时时控制模式,采用了一组太阳能板结合锂电池一起为整个系统供电,由光敏电阻来实现对光强信息的采集,采集的数据传给 ARM 芯片进行比较处理。由于需要二维追踪,我们采取了两个电机装置,分别控制水平方向的转动,与垂直方向的转动。
工作流程如下:首先,当系统收集光电传感器数值,判断天气情况。如果是阴天,则系统不启动;如果是晴天,系统进入启动状态。首先,用键盘输入当前的时间,那么 ARM 芯片会根据时间与电机转动角度之间的对应关系,计算出当时太阳的高度角和水平转动的角度, 控制太阳能电池板对准太阳。通过ARM芯片对光敏电阻电平的采样,对电压值进行比较,根据电平的变化,使 ARM 芯片控制电机转动云台,使太阳能电池板重新垂直对准太阳.[4]
2.3拦截机构、抓盘、回收箱的设计
在双轮的船体中间一个位置还额外加装了拦截抓盘机构,在实现基础垃圾收集与储存的功能的同时,更能保证垃圾在较大空间区域内的实施集中,最终可以保证垃圾实时通过移动传送带或者传动管道进入垃圾回收箱。为防止船体由于过重从而使承载垃圾的重量较低拦截机构、抓盘和回收箱的设计均采用网状结构,不仅保证了船体的重量最小,更减小了船只在行进过程中水带来的阻力,有效的降低能耗。
2.4PH传感器设计设计
目前测量PH的方法主要是玻璃电法。目前测量PH的方法主要是玻璃电法。玻璃离子电极直接作为输出指示参比电极,银-氯化银离子电极直接作为指示参比电极,两者组合构成"化学电池",通过对电动势的连续测量分析来初步确定待测溶液浓度ph的数值,根据ernernst微分方程原电池组的输出电动势、被检预测待检溶液溶水温度及被检待测液体溶液浓度ph之间关系满足如下公式:e=e0+kt(phx-ph0)
上式中,e=0表示原电池推进输出输入电压,e0表示温度常数,跟待测材料温度有关,k中k是其在nernst中的系数,t为被检待测缓冲溶液中的温度,phxt则表示待测缓冲溶液温度ph系数值。只要准确测量了原电池输出电压和缓冲溶液中的温度就可以能直接求出被检待测缓冲溶液的温度ph系数值。
2.5动力系统设计
动力系统整体结构中,船体减速运动转向驱动控制部分由一个et54水下减速电机元件组成,船体减速转向驱动部分由一个jxjxpdi-6221mg20kg180度减速金属复合齿轮式数码舵机元件组成,输送带减速运动控制部分由一个0度减速驱动电机元件组成,收集负载范围大的扩展臂减速驱动控制部分由一个0度直线减速电机元件组成。
2.6传动系统设计
传动系统的核心流程是减速电机带动传送带,同步带轮中舵机与水下电机共同工作进行传动,通过而链条保证了传送带的滚筒与减速电机的联动,全程通过电力进行维持工作,由蓄电池提供原动力,有齿链条结合,保证每个部位传送达到最高效率。
2.7调节系统设计
船体转向驱动中,直线电机与收集范围扩展臂的传动是通过连杆的方式实现的。当面对水面垃圾分布较散或较为集中的地区时,也考虑到船体的传送带的负载极限,可以进行人为操控进行适当调节扩展臂的范围,达到收集的最佳效率。
2.8水陆两用底座设计
针对浅水域岸边大多为缓斜坡入水,易出现搁浅,因此设计了水陆两用底座。水陆两用底座与船体相结合可直接在岸边行走,驶入水域深处转变螺旋桨推进,解决了因岸边地形地貌原因而影响出行。水陆两用底座主要由2020型铝型材、万向轮、橡胶轮、圆柱斜齿轮、光轴等组成。由于电机需防水,利用圆柱斜齿轮把驱动电机安放于船体之上,既保留了传动效果又达到了电机的防水作用。
2.9浊度传感设计
浊度传感器用来监测水质的浑浊度。[2]浊度传感器基于光学原理,利用发光二极管和光电三极管对特定波长的接受作用,测出水的不透光度和其他的物质的浓度。传感器则通过发光二极管光源发出的光经污水反射,根据收到的光线量,计算出水的浊度。[3]
3 结论
该机器采用模块化设计,由驱动模块、污染物收集模块、主控模块、太阳能追光模块、远程遥控、定位模块及水质监测模块组成,具有良好的稳定性和可控性。驱动模块采用两个电机作为驱动器,使用两电机差速转动来控制方向,有利于更方便高效的以最佳角度和姿态将漂浮污染物对准扩收拦截挡板。污染物收集模块分为三部分,第一部分是扩收拦截挡板,第二部分是垃圾传输装置,第三部分是自载可拆卸收集箱。当无人船行驶到漂浮污染物前,通过扩收拦截挡板将垃圾收纳到垃圾传输装置的传送链上,垃圾传送链将垃圾传送到自载收集箱中,从而完成污染物的收集。
本次设计实现的主要任务如下:
(1)简述了智能检测清洁无人船在国内外的基本研究现状,并且说明了本设计的研究意义和智能检测清洁无人船未来的发展趋势。
(2)设计智能检测清洁无人船的结构,,关键机构采用3D打印技术进行零件打造。同时提出了一套以STM32为控制核心,以CSI摄像头作为视觉传输的硬件设计,以太阳能追光系统作为动力系统,做出了系统硬件配置的具体结构图和原理图。分析并实现了智能检测清洁无人船需要实现的各项需求功能。
参 考 文 献
[1]陈静婷.无人船在“智慧治水”的应用[J].现代信息科技,2020,4(15):137-139.
[2]姜亚锋. 基于无人船装置的水质环境动态监测系统设计[D].上海海洋大学,2020.
[3]刘雨青,姜亚锋,邢博闻,冯俊凯,李佳佳.基于无人船装置的大水域环境监测系统设计[J].船舶工程,2019,41(01):17-22+73.
[4]杨帜,张铭显,孙天宇,赵晴,李金夺,彭晓旭.太阳能自动追光系统的节能技术研究[J].中国新技术新产品,2018(15):1-3.
[5]孙毅飞,罗紫韧,牛峥,曹冰雁.基于灰度匹配摄像头的自动追光系统[J].电子测试,2019(13):24-25+27.
作者简介:赵维双(2000-),女,山东省济南市人,学士,研究方向:机械设计。
该项目由省级创新创业训练项目《智能检测清洁无人船》(S202113320107X)支持。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



