浙江华业电力工程股份有限公司 315010
摘要:依据电动及液压制动的构造特征与工作原理,对制动过程进行了力学分析;根据目标任务和设计要求,说明了制动力能量参数的设计原理与计算方法;使用Pro/E软件构建了制动系统的三维模型,并对制动系统成品部分进行了结构静力分析,为类似制动系统的设计提供了基础。
关键词:电力液压块式制动器;力能设计
制动器,是使运动部分减慢、停车或处于停止状况功能的装置。电动液压块式制动应用矿业、海港码头、建筑工地等施工设备的机械操作上,但在现实使用中因为其零件强度和刚性都不够高等因素会造成制动损伤、制动失效等,并为现场工作环境增加了风险。
根据电动或液压块式制动构件特性与工作机理,设定了制动的基本参数,通过推导对块式制动零部件进行运算与分解。调整不符合的项目对块式制动构件重新设定。运用有限元方法对块式制动器制动臂、制动器块、主弹簧等主要零件进行强度与刚性的分析。最后,再依据仿真结果对制动器模块加以检验,确定能否达到设计要求。
1电力液压系统块式制动器的主要构造与工作原理
电动液压块式制动器系统主要由制动臂、底板、制动器块、主弹簧、供电液压推进器等组成,如图1所示,其基本动作机构为当操作液压操纵杆时,推杆向前推进,使制动器块与推杆一起在主弹簧的帮助下推开二侧横向制动臂,主弹簧向下压,制动器块和制动轮一起脱离,同时制动器门开启;当液压控制发动机或驾驶员失去动力时,制动块在主弹簧力的作用下通过制动臂压在制动轮上。此时,转向机构的添加和拆卸制动将继续或停止。
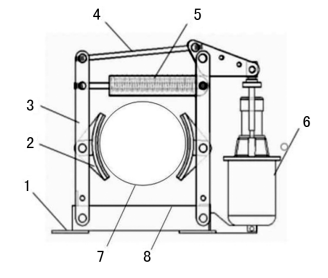
图1电力液压块式制动器结构
其中,1为底座,2为制动器块,3为制动臂,4为拉杆,5为簧片,6为电动液压推动器,7为制动轮,8为支架。
2电动液压块式的制动力能计算方法
以YWZB电力液压块式制动系统为主要研发对象,先借鉴已有同型块式制动系统并完成制动器机构的初步设计概算后,再完成制动力矩试验以满足产品设计需要。然后,通过制动转矩确定主簧片尺寸,进而校核块式制动主体零部件和整体制动器;最后,经过ANSYS静力学分析方法,构建了制动系统整体结构静力学的有限元分析模型,并对关键部件完成了强度和刚性的计量与分析方法。
2.1电力块式制动器额定正压力计算
制动块正压力和额定工作力分别为:
![]() (1)
(1)
![]() (2)
(2)
式中:M为额定扭矩;F为额定正气压;Η’i2、u簧片,依次为弹簧到闸瓦之间的杠杆比、减振弹簧到闸瓦之间的传动效率、摩擦力等;D则为制动轮直径(mm)。
2.2制动器主弹簧计算
主弹簧一般选用伸缩弹簧,按照实际工作要求先选择材质并设定允许使用剪切应力,然后测量各技术参数。已知额定压力F时,得最大工作负荷:
![]() (3)
(3)
电动或液压系统驱动器接通时,将推杆向上拉动,使制动器块拉杆克服主减震弹簧的紧张感而把制动器臂推开,此时需更大弹簧压力才把制动器块与制动轮之间形成空隙而开闸,此时簧片的最大变形量为x2,开闸簧片压力:
![]() (4)
(4)
式中:G为切变模量,和减振弹簧材质有关;[t]为许用切应力,和簧片材质有关;K为弹簧曲度系数,本文取值为1.40;C为弹簧指数,取4;ε为制动瓦退距,取0.8;λ为松闸时弹簧伸展量(mm);k为重弹簧强度关系。
2.3制动主要零件在校核
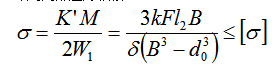
计算结果和校核制运动臂时,均采用(直臂)对制动臂实行了校正,其制动臂构造如图三所示。制动臂许用内部应力校核:
 (5)
(5)
式中:K'、B、d0、δ依次是截面系数、运动载荷系数、制动器臂长度、制动臂销轴孔径、制动臂厚度(mm);[σ]为许用弯曲应力,其中[σ]=0.6σs。
3 供电液压块式制动算例
以液压动力制动器ywzb-1000为例,该类型制动器的标称扭矩范围为1000 n m[7],并使用上述力和能量计算完成设计修正,以设计支撑制动器的主要部件。
将初始参数替换为方程式(1)和(2),制动正压力为FN=12500n;标称工作压力f=6450N;划出上述参数,制动轴销的比压P4=9.14mpa;如果已知P1,则满足上述要求。
电动液压块式制动器制动臂数据信息说明:l1=270mm,l2=280mm,l3=360mm,其它相关参数:宽度B1为100,厚度![]() 为30,轴销孔径d0为35。
为30,轴销孔径d0为35。
弹簧切削力通过替换方程式中计算的参数获得。t为760mpa,静态硬度n为1.49;弹簧应力[t]=785[n]对于可接受的安全系数,当弹簧计算结果和材料数据精度较高时,可取1.3~1.7;材料精度较低时,取1.8~2.2;当计算结果满足设计要求时。
4 有限元分析
采用Pro/E建立的三维制动模型,利用ANSYS技术对完成的单元进行分析。通过应力状态分析、优化设计、瞬态数据分析和制动部件稳定性分析,论证了制动器的合理性。应用完成元件的软件系统时,应完成当前处理操作,并划分制动网。网格分量的相关性定义为50,分割质量定义为平均值,分割方法为自动分割到0.5。
分析有限元的结构最大应力为161.58mpa,远低于一般金属材料的最大牵引力345mpa,安全系数达到2.1,表明在上述最大荷载条件下,结构仍能正常工作,无损伤。制动臂的最高屈服力是112.42MPa,制动器块的最高屈服强度力为38.86MPa,主弹簧承载力为550MPa,本文所有设定均满足实际使用情况。
5 结语
以ywzb电液制动系统为主要研究对象,进行了制动过程的流体力学分析方法,并根据目标和设计条件,给出了制动能量基本参数的设计算法,包括标称重量、正压力和主液压制动弹簧的计算,以及制动器主要部件的检查方法,并利用电气液压块式制动器算例计算校核,以证明制动力能设计方案的可行性。利用Pro/E软件构建的制动三维建模,并运用有限元软件对制动块零件如制动臂、制动块主弹簧等完成了分解,根据有限元的模拟结果,此次工程设计的电动或液压系统块式制动器可以达到强度要求。
参考文献:
[1]程贤福, 程安辉, 邱浩洋,等. 电力液压盘式制动器关联模块的耦合分析方法:, CN108021778A[P]. 2018.
[2]孙文英. YWZ_9系列电力液压块式制动器的研制[C]// 1999年晋冀鲁豫鄂蒙六省区机械工程学会学术研讨会. 0.
![]()

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



