空军勤务学院 江苏 徐州 221000
摘要: TDOA的多声源空间定位方法主要是基于多声源定位方法比较难将麦克风内获得的TDOA值和真实声源做相连。因此,可以采用互相关算法对生源中的TDOA值做出估算,并求解出多个目标声源的空间所在位置。为可以有效消除虚假声源问题,可以将阵列麦克风与校验的麦克风分成两组,构建分组上的阵列校验模型。将所有声源做定位,多麦克风的虚假声源消除做校验,从而获得多声源初始位置。可以用真实声源最初的位置去建设全阵列TDOA的序列校验模型,通过校验获得真实声源的位置,在构建一个仿真声源实验系统,提出相应方法做验证。通过仿真实验的结果提出的方法可以有效消除TDOA多声源定位的虚假声源,并且可以提高精准度。
关键词: TDOA;多声源定位;虚假声源;消除方法
在近些年,声源定位成为各大相关行业的关注焦点,现阶段声源定位应用范围较广,在目标声源跟踪、远程会议系统、智能化机器人、科技产业等多种科技类领域都得到广泛的应用,并具有较高应用价值。声源定位通常采用的是麦克风阵列来对声源位置做估算,现阶段地位方式主要有波束形成、声全息方法、参数测量这三种。此外,要想获得高分辨率的声场的重构平面图,在阵列中要准备较多的麦克风的数量,而在研究TDOA方法中可以发现应用较少的麦克风数量就可实现想要追求的声源定位分辨率。
TDOA技术方法,英文全称为Time Difference of Arrival,中文直译的意思,就是“到达的时间差”。该项技术方法的实质内容,就是利用这种“到达的时间差”进行相应目标的精准定位[1]。
基于TDOA的多声源定位技术,是对通过时间到达数据的监测计算进行声源定位这种技术方法的进一步完善与发展。通过时间到达数据的监测计算进行声源定位,就是通过对多个声源到达监测位置的时间,来对声源与监测位置之间的距离进行测量,并将其距离数据作为以监测位置为中心的圆形面积的半径长度,对声源的具体位置加以最终确定。这种技术方法在具体实践中存在一个突出的问题,就是技术上难以监测到绝对时间的准确数值[2]。基于TDOA的多声源定位技术,就回避了这样的技术弊端,通过监测多个声源的绝对时间计算到达时间差,就能够确定出将监测位置作为中心焦点、将到达时间差相应地距离差作为长轴双曲线距离,其中双曲线的交汇点位置就是声源的准确定位。
在传统的声源定位方法中,是选择在重建的二维声场平面上进行声源的识别,如果需要对声源目标进行三维空间内的精准定位,就需要在此基础上进行更为复杂的大量运算。同时为了能够获取更高分辨率的声源数据信号,还需要对声场进行进一步重新构建,重新构建的声场中就会需要大量的麦克风声源数量。而如果采取TDOA技术方法,麦克风的数量就可以实现大幅度的缩减,也能够获取声源的精准定位[3]。对于单一的声源位置确定的计算,采取简单的两步加权算法即可实现,但是对于多声源的位置确定,对声场阵列当中任意麦克风对算法的估计,TDOA技术方法与其中每一个声源的关联性都处于未知状态,这就容易导致虚假声源的产生,对于多声源的精准定位存在一定程度的不利影响[4]。
2.1虚假声音原理
在只有单独一个声源的情况下,只会产生一个峰值,这时候就会获得麦克风阵列中TDOA值的所有数据来定位声源位置。而当有多个声源情况下,就会产生多个峰值,这时候每个单独的峰值就代表着每个真实的声源信息。但是在其他声源特征的缺乏的情况下,峰值的顺序就不能得到保障,这就会导致峰值无法与真实声源做对应。当用两个麦克风对三个声源做混合信号检测时会出现如下图1所示的互相关估计的结果[5]。
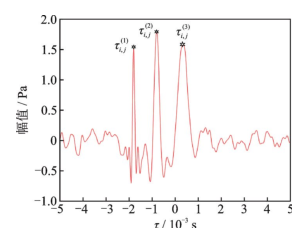
图1:三个声源互相关结果
根据图1显示可以看出,声源数量和出现峰值的个数是一致的,在解决虚假声源消除方法的过程上要预先对所需要的声源数量先验的知识。
2.2麦克风阵列分组定位校验模型
在多生源的定位中,可以通过利用声源和麦克风相对的位置做出分离目标的声源。可以将阵列所用麦克风分成两个组,第一组麦克风定位的是多个声源位置,减少计算数量,在第一组只需要满足Chan算法来求解阵列麦克风需求的值,求解最小值做标准[6]。第二组麦克风就是用于消除虚假声源,阵列麦克风和声源之间做相对位置的关系,以此可以组建麦克风阵列分组定位的校验模型,这样就可以确定真实声源的具体位置。
第一组麦克风定位结果的数值为 NP=NSNm,由于计算时间会跟着麦克风的数量变多指数也会随着增长,因此除了参考用的麦克风意外还需要由其他4个麦克风组成第一组的阵列,这种方式就是在Chan的方法下的三维空间中各处合理的精度定位结构的最小麦克风数量的需求。真实声源开始到第一组麦克风阵列的TDOA如下图2所示:
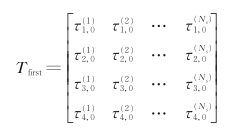
图2:真实声源到第1组麦克风阵列的 TDOA
真实声源开始到第二组麦克风的阵列TDOA如下图3所示:
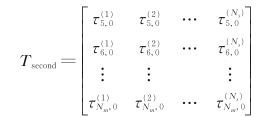
图3:真实声源到第2组麦克风阵列的 TDOA
2.3全列阵TDOA序列校验模型
通过仅有的5个麦克风具体定位获得最开始的真实声源,这样可以有效增加已经定位的麦克风数量的精准度,通过对最开始的真实声源得到的位置信息,建设全阵列的TDOA序列校验模型,利用所有阵列的麦克风提升多生源定位的精准度[7]。
3 仿真分析
3.1定位场景和声源信号构造
在实际场景中大多数的音频所产生的噪声都是有色噪声。为可以更好地模拟出声源定位的实际真实场景,采用的色噪声要构建出不同种目标声源信号。阵列几何的关系和声源频率所产生出的特性有关联。在单频声源定位上,避免声源产生相位缠绕,阵列的设置要满足 dmax<c/2fsingle,其中dmax是为了可以参考麦克风和其他麦克风之间的最大的距离,c是声速,fsingle是单频声源所产生的频率。在宽带和脉冲的声源上,就可以忽略相位缠绕,即使忽略,阵列中几何关系也不受限制。选用麦克风阵列的最大间距是0.5米,针对的是单频声源具有的频率上限,这样就可以实现大部分声源频率特性的声源定位。在模拟实际声源产生的复杂多样性,不同声源所设置的频率有所不同,并且会有频带重叠的情况发生。
3.2多生源定位结果分析
3个声源在和阵列麦克风组间的定位场景如图4所示:在相对合理的噪声水平上,对3种定位场景分别定位,参考麦克风和另一个麦克风构成的一组麦克风对比,用相互关算法所估计出的TDOA,可以利用提出的消除虚假声源的方式来实现多生源的定位[8]。
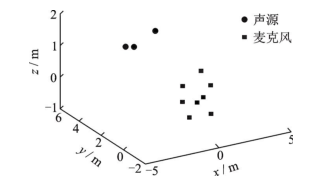
图4:阵列麦克风和定位场景
文中可以看出利用麦克风的阵列分组来定位校验模型消除虚假声音,从而可以实现多生源的分离和定位。在通过TDOA序列校验模型可以得到最后的真实多生源的评价定位误差要比分组定位校验模型所获得的最开始多生源的平均误差小很多,有效提高了多声源的定位精准度。在相对空旷的测试环境中,环境中的混响和其他干扰噪声的影响会比较少,这就可以实现近场的多声源定位。
[1]熊杰,陈俊,宁静,等.移动辐射源AOA-TDOA-FDOA联合定位闭合解算法[J].电子科技大学学报.2020,49(2).219-227.
[2]李红光,郭英,眭萍,等.基于稀疏贝叶斯的多跳频信号二维波达方向估计[J].上海交通大学学报.2020,54(4).359-368.
[3]王冠群,张春华,李宇,等.一种适用浅海声源的多阵列直接定位方法[J].声学技术,2020,39(5):546-551.
[4]刘海涛,陈永华,林艳明,等. 基于TDOA多声源定位的虚假声源消除方法[J]. 振动、测试与诊断,2021,41(2):319-326.
[5] 清华大学苏州汽车研究院(相城). 一种基于TDOA多声源定位的虚假声源消除方法:CN202011266582.X[P]. 2021-04-09.
[6]张俊红,汤周杰,林杰威,等.IVMD融合RobustICA的内燃机噪声源分离[J].振动、测试与诊断.2020,40(1).28-34.
[7]季浩然,马晓川,张舒皓,等.功率受限的常规波束形成后处理拟合方法[J].声学学报.2020,45(1).1-14.
[8]孙长伟,成谢锋.混响环境下改进的球谐波域L1-SVD声源定位算法[J].武汉大学学报(理学版),2018,64(5):459-470.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



