杭州瑞利超声科技有限公司 浙江省杭州市 邮编: 311122
摘要: 网位仪是渔业生产中的重要助渔设备之一,它通过水声换能器及其它辅助传感器探测作业渔网网口形状、渔网在作业水域的深度、水温等信息,帮助用户根据网位仪显示的探测信息进行瞄准捕捞,从而提高渔业生产效率。本文介绍了网位仪的系统组成、工作原理及软、硬件设计。整个网位仪软、硬件系统经过实验室联调、水池测试后,在千岛湖,莫干湖,象山石浦,台州一江山岛等地进行了外场试验,各项指标均达到设计要求。
关键词: 网位仪 水下测距 应答器
1.引言
在捕捞作业中,渔网的实际形状尤其网口扩张情况直接影响捕捞的产量。捕鱼所在水域的海水温度和捕鱼时渔网的入水深度也会关系到鱼群的种类和数量,而这些都会直接关系到捕鱼的经济效益。渔网网口姿态声学监测仪(以下简称网位仪)是远洋拖网渔船必备的电子助渔装备之一,主要用来实时监测拖网网口形状、入水深度、海水温度等。网位仪的应用效果如图1所示。
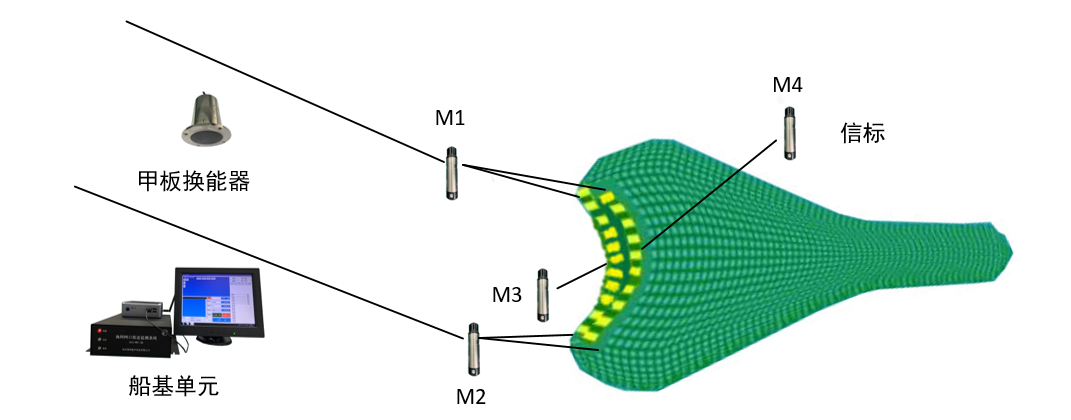
图1 网位仪的效果图
2.网位仪系统组成及工作原理
网位仪系统由甲板单元和水下信标单元两个子系统构成。其中甲板单元包括显控计算机和网位仪控制主机、声学换能器探头和前置放大器模块。水下信标单元包括安装在网口的水下应答信标;网位仪控制主机的系统框图如图2所示。
人机交互界面
微处理器
功放板
岸基换能器
前放滤波板
GPS模块
水下换能器
功放板
微处理器
前放滤波板
![]()
图2 网位仪主机的系统框图
网位仪的工作原理如下:通过应用水声测距原理分别测量各信标与渔船之间的距离和两个主信标(即M1与M2)的相互距离,给出完整的渔网形状和网口扩张情况;通过测量海水压力可知渔网到水面的距离和网口上下宽度,防止拖网速度太快和渔网碰到海底;利用温度传感器提供的海水温度信息可知捕获目标鱼种。
3.系统硬件设计:
甲板单元的电子部分由线路板、电源变压器、电源滤波器、前置放大器、RS232通信接口和LED显示灯构成。
电源滤波器的选择关系到系统工作的可靠性,因为船上的电源供应往往不太稳定,所以应当选用滤波较为理想的电源滤波器。最终本设计选用的型号为CW2B-06A-T,能够符合设计要求。
电源变压器为通用220VAC转12VDC变压器,最大工作功率40W,可以满足系统对能量的要求。
前置放大器用来连接换能器和甲板主机单元。因为换能器安装的位置远离船舱内的甲板主机,而长距离的换能器线会导致严重的信号衰减,所以将放大器前置可以很好地解决这个问题。
RS232通信接口用来实现和显控单元的数据交互。
LED显示灯可以提供系统的工作状态指示。
线路板的设计满足系统总体设计的指标,主要实现对水声信号的各种处理,主要包括对接收信号进行放大、滤波和比较;对换能器进行匹配;对接收信号进行采集;对发射信号进行功率放大;对电池进行管理;系统启停开关处理等。接收线路部分包括信号接收电路、放大电路、滤波电路和比较器电路,如图3所示。信号接收电路对换能器输出的微伏级信号进行放大和滤波;放大电路分为二级放大,第一级固定增益放大,后级采用对数放大,放大倍数根据自校时收到的换能器信号大小来定;滤波电路采用频率可控的程控滤波器,可以根据信号频率调整滤波器的中心频率;比较器电路将经过滤波器后的正弦波信号转换为可供微处理器直接检测的方波信号。
信号输入 初级放大电路 对数放大电路 程控滤波器 比较器 微处理器
图3 信号接收电路流程图
水下信标单元的发射和接收电路与甲板单元类似。根据每个信标具体功能的不同,选配温度或压力传感器,配有自动入水检测开关,在此不一一阐述。
4.系统软件设计:
系统软件设计包含甲板单元、水下信标单元和显控的软件设计。
甲板单元是整个系统的核心单元,由它负责换能器信号的收发控制,各信标回波信号的分析处理, GPS数据的采集以及与显控单元的数据交互。
甲板单元的核心功能是实现水声测距和水声通信,在网口不同的位置安装不同编号的水下信标,发送特定的编码,水下信标接收到自身特有的编码后响应甲板单元的编码命令,并把自身的深度或者温度信息上传给甲板单元。甲板单元根据收、发信号的时间差计算得各信标与换能器之间的距离。甲板单元发送和接收原理示意图如图4所示。
码制采用4个(或更多)离散FSK(Frequency-shift keying)频移键控编码(24.38KHz代表0,25KHz代表1),每个码元发送10ms,空闲30ms,每个水下信标对应一个独特的码字,最多可以加载16个不同的换能器。
发![]() 送:
送:
![]()
接![]()
![]()
数据
距离
图4 甲板单元发送接收原理示意图
在定位过程中,采用“双脉冲”的形式, 将目标的深度、温度等信息调制到双脉冲的时间间隔上,双脉冲间距范围为 ~
~ ,与目标深度满足线性关系。其中第一个信号称为测距脉冲,用于计算目标与换能器之间的距离;第二个信号称为测深(或测温)脉冲, 与第一个脉冲之间的时间间隔用于表征目标深度(或温度)。目标深度(或温度)与双脉冲间隔之间的关系为:
,与目标深度满足线性关系。其中第一个信号称为测距脉冲,用于计算目标与换能器之间的距离;第二个信号称为测深(或测温)脉冲, 与第一个脉冲之间的时间间隔用于表征目标深度(或温度)。目标深度(或温度)与双脉冲间隔之间的关系为:
其中, H 为目标深度(或温度),Δt 为双脉冲间隔,单位ms, 代表目标深度最大量程,单位 m;或者为温度最大量程,单位℃。
代表目标深度最大量程,单位 m;或者为温度最大量程,单位℃。
水下信标回传的信号采用线性调频信号,
甲板单元与显控单元按照约定的通讯协议,以RS232标准接口进行数据交互,实时刷新上传测得数据,实现对渔网网口姿态的实时监测。
水下信标单元软件设计:主要包括接收检测并判别自身特定的编码,压力、温度传感器,入水开关等的检测和移动平均滤波,并调制到双脉冲的时间间隔上,完成对呼叫信号的应答。
显控单元设计:显控软件用来和网位仪甲板单元通讯,将网口上下高度和左右宽度、渔网的深度、海水温度等信息准确、实时、直观地显示出来,显控软件还实现一些基本的启停,刷新率的配置功能。显控软件的最终效果如图5所示。
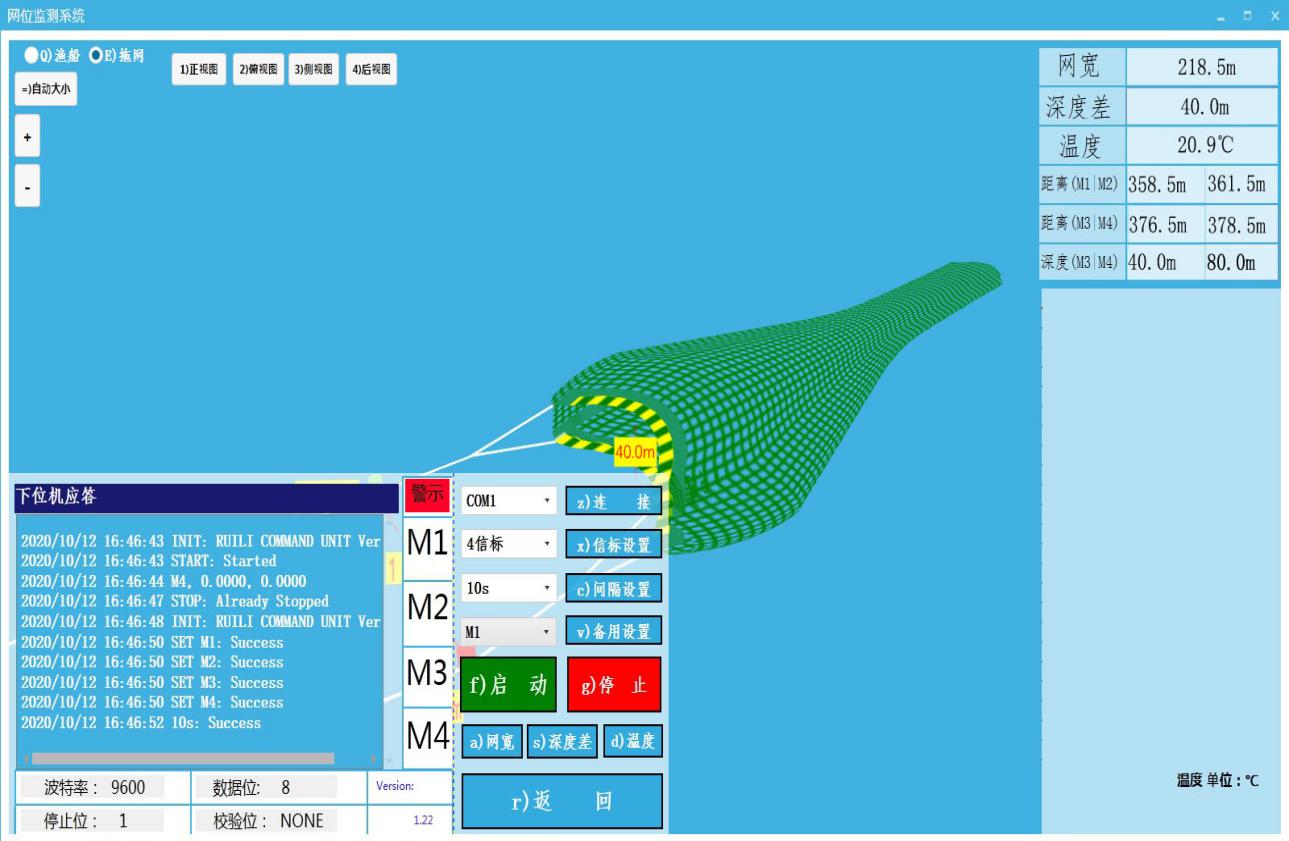
图5 显控软件界面
5.试验分析
主要技术指标如下:
1)测距范围: 1500m,精度:1%,分辨率:±0.5m;达到指标。
2)深度范围:≤600m,精度:±1m,分辨率:±0.5m;达到指标。
3)温度范围:0-60℃,精度:±0.5℃,分辨率:±0.1℃;达到指标。
4)信标重量: 1.4kg(在水中);达到指标。
5)电池容量:连续工作18h(4信标模式下);达到指标。
技术指标测试方法及达到情况如下:
①测距范围:1500m,精度:1%,分辨率:±0.5m;达到指标
测试方法如下:将M1和M2信标放置与标定距离处(用差分GPS测定),用本产品的甲板单元和M1信标进行水声测距,每个点连续测试10组后取平均,将所得数据与标称值进行对比。当甲板单元的换能器向前或者向后移动0.5米时,记录下测量值对应的变化。以上指标在千岛湖试验站测试数据如表1所示。
| 标定值 | 测量值 |
测距范围 | 0-1500米 | 0-1500米 |
测距精度 | 0米 | 0.1米 |
100米 | 99.7米 | |
300米 | 302.5米 | |
500米 | 503.2米 | |
700米 | 705.6米 | |
900米 | 906.9米 | |
1100米 | 1100.3米 | |
1300米 | 1308.4米 | |
1500米 | 1505.7米 | |
测距分辨率 | 0.5米 | 0.2米 |
表1测距相关指标实测值
结束语
本文研制渔网网口姿态声学监测仪,可实时准确地测定渔网在水中的深度、网口张开高度、网口宽度及海水温度等,经过多轮湖试和海试,产品的各项指标均达到设计要求。现已交付两套样机,在台州温岭实际使用。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



