1.蚌埠医学院第二附属医院神经外科; 2.蚌埠市中心医院神经外科(安徽蚌埠 233000)
【摘要】目的:探讨机器人辅助脑立体定向手术的临床应用价值。方法:回顾性分析自2021年1月至2021年12月在蚌埠医学院第二附属医院神经外科收治的11例患者临床资料,均在华科Sinovation机器人辅助下完成手术。结果:所有患者均精准定位靶点,并顺利完成穿刺打靶,5例脑出血穿刺引流术后血肿体积明显减少,其中3例基底节出血,2例脑干出血,引流管在位良好;2例颅内占位性病变穿刺活检均获得阳性病理:1例少突胶质细胞瘤,1例星形细胞瘤;2例三叉神经痛微球囊压迫术,术后即刻疼痛消失;2例STN-DBS术后微毁损效应明显,模拟电场与电极重合良好。术后无症状性出血1例,余均无神经功能损伤及感染发生。结论:机器人辅助脑立体定向手术具有微创、精准、安全等优势,在神经外科手术中具有非常实用的价值。
【关键词】机器人;定向技术;微创;精准
[Abstract] Objective: To explore the clinical value of robot assisted brain stereotactic surgery. Methods: the clinical data of 11 patients treated in the Department of Neurosurgery of the Second Affiliated Hospital of Bengbu Medical College from January 2021 to December 2021 were analyzed retrospectively. All of them completed the operation with the assistance of Huake innovation robot. Results: all patients accurately located the target and successfully completed the puncture and targeting. The hematoma volume decreased significantly in 5 cases of intracerebral hemorrhage after puncture and drainage, including 3 cases of basal ganglia hemorrhage and 2 cases of brainstem hemorrhage. The drainage tube was in good position; Two cases of intracranial space occupying lesions obtained positive pathology: 1 case of oligodendroglioma, 1 case of astrocytoma; The pain disappeared immediately after microsphere capsule compression in 2 cases of trigeminal neuralgia; The microdamage effect was obvious in 2 cases of STN-DBS, and the simulated electric field coincided well with the electrode. Asymptomatic hemorrhage occurred in 1 case, and there was no neurological injury and infection in the rest. Conclusion: robot assisted brain stereotactic surgery has the advantages of minimally invasive, accurate and safe. It has very practical value in neurosurgery.
[Keywords] Robot; Orientation technology; Minimally invasive; accurate
现代外科手术的重要理念是精准、微创,尤其对于神经外科手术来说,因其涉及人体中枢-大脑,因此在最大程度处理病变的同时,保护重要结构的功能完整性则显得更为必要。随着神经影像、计算机技术等的快速发展,神经外科机器人应运而生,其具有精准、微创、自动化等特点,已逐渐应用于神经外科手术的各个领域,并取得显著效果。本中心应用华科Sinovation机器人辅助完成12例患者手术,报道如下。
1.资料与方法
1.1病例资料
11例患者包括男性6人,女性5人,年龄在38-81岁之间,平均年龄为60.9岁,所有患者术前常规行头颅CT或MRI检查,部分患者完善头颅CTA排除潜在血管病变。在机器人系统中进行深度影像融合及配准后,行手术操作。
1.2手术方法
1.2.1一般准备。患者常规理发,消毒头皮,留置MARK标记,方法:在术区以外不同平面选3-5点,局麻下留置骨钉,行薄层CT扫描,扫描OM线至颅顶全部层面,确保囊括骨钉在内并可完整重建。通过光驱或者U盘,将患者的影像数据存储到机器人系统中。
1.2.2 机器人设置。对于脑出血患者,术前薄层CT即可满足手术要求。而对于颅内占位病变活检、脑深部电极植入术等,还需要将术前MRI资料与术前MARK标记后的薄层CT进行影像配准。系统中设置手术路径。准备完成后需要进行以下几个步骤:(1)连接:患者头部按手术体位要求,安装三钉头架并固定,机器人调整至适当位置(一般手术床侧方),升起机器人,连接三钉头架并固定;(2)注册:选择点注册流程,逐一标定MARK骨钉顺序,安装注册探针并移动机械臂至各标定点注册,记录坐标。(3)验证路径通过性:通过后,进入手术导航流程。
1.2.3 手术操作。机械臂回位至初始位,卸下注册探针,消毒、铺巾,机械臂套无菌袋。安装无菌定位器,踩下脚踏至导航初始位。按设置的手术路径,将机械臂置位到手术靶点,确定手术入路点,机械臂回位。予手术入路点设计皮瓣,颅骨钻孔、烧灼剪开硬脑膜,再次置位机械臂,更换穿刺套筒,选择穿刺工具,完成穿刺置管、电极植入、组织活检等。
1.2.4 术后处理。常规复查术后即刻头颅CT,明确术中有无继发性出血。抗感染等液体治疗,根据不同手术类型,记录相应观察指标并前后对比分析。
2.结果
11例患者手术过程均顺利,无术中骨钉松动,无注册困难,无机械臂置位困难等,路径通过正常。5例患者行脑出血穿刺置管引流,其中3例基底节出血,2例脑干出血,术后复查头颅CT,引流管在位,术中抽吸血肿后,血肿体积较术前明显减少,穿刺道无继发性出血。2例占位病变穿刺活检,均取得阳性病理标本,明确诊断,1例为少突胶质细胞瘤,1例为星形细胞瘤(术后复查见肿瘤中央少量出血,反复复查未见增加,无功能缺损)。2例三叉神经痛患者,术中见穿刺球囊形成标准的“梨形”,术后患者疼痛消失。2例帕金森病患者行STN-DBS,术中电生理信号典型,术后微毁损效应明显,Lesd-DBS软件重建后,见模拟电场与STN核团重合良好(典型案例见图1)。
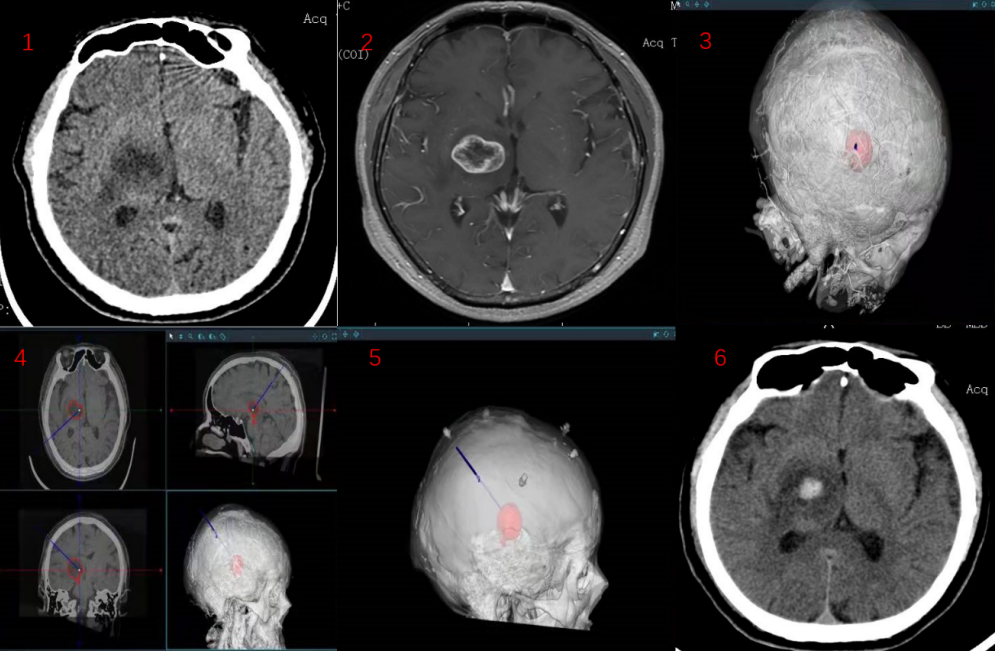
图1 病变活检患者图例,图1-2术前CT、MRI,图3-5为机器人融合处理,包括病变勾勒、注册定位及穿刺路径设置等,图6位术后复查见少量出血。
3.讨论
随着外科治疗理念的转变,传统的外科手术逐渐变得微创化、精准化、智能化。精准定位病灶,最小副损伤、最大功能保护是目前神经外科治疗的重要理念及要求。目前立体定向技术已经逐渐从框架、手动调节发展到无框架、机器人自动化的阶段,并且广泛应用于包括神经外科的各个外科领域。
3.1 机器人辅助立体定向技术的契机
神经外科见证了机器人在临床的首次应用,并且一直是机器人技术发展的重要平台[1]。神经外科作为医疗机器人应用的重要领域,原因有以下几点[2]:(1)大脑存储于固定的容器中-颅骨,容纳及保护脑组织,硬质颅骨能稳固的固定,使得机器人操作变得可能,这也是机器人在泌尿外科、妇产科等领域应用受限的重要原因之一;(2)机器人的功能躯体学与大脑的解剖拓扑学能够做到很好的相互对应;(3)大脑是人体解剖与功能最复杂的器官,手术操作无疑需要最高程度的精准度,普通的立体定向技术能够大体满足,而机器人以其更高的精准度及自动化,更符合当前神经外科治疗的理念。
3.2 机器人辅助立体定向技术的优势
基于框架的立体定向技术以往被认为是精准定位的金标准,有研究报道其定位精度误差低于1mm[3]。经过长达一个世纪的进化,已非常成熟的应用于临床 [4-6]。然而由于其操作过程的复杂性来说,仍存在不足之处。以Leksell头架为例,术前需常规于患者头部安置立体定向头架,两侧前额及后枕部以4根钉棒固定,且需局麻辅助,明显增加患者不适体验,并且时有打穿颅骨的情况发生,尤其在年幼及老年患者中。此外,在术中安装“耳环”、调整XYZ坐标及手动推进穿刺的过程中,均可能产生认为误差,导致最终路径偏移[7]。神经外科机器人是神经影像技术、导航系统及计算机技术结合的产物,通过多模态影像处理、自动识别注册、机械臂自动传感等,实现精准靶点定位及靶点到位[8]。(1)注册:机器人基于多模态影像融合数据,避免框架金属伪影导致的图像失真变形[9],术中更可以二次注册,模拟靶点校正[10]。(2)穿刺引导:机器人活动范围大,机械臂通过自动传感装置,可自由6向活动,理论上无手术操作盲区;(3)安全:基于术前影像融合,合理规划路径,避免损伤皮层血管,精准到位。综上,机器人立体定向在空间信息及方位的处理和规划路径的精确引导方面较传统框架立体定向技术更直接,更灵活。
3.3 机器人辅助立体定向技术的应用
我国是较早开展无框架立体定向技术的国家之一,田增民教授等最早在 1997年便使用国产CAS-A-2型机器人系统做肿瘤病灶活检等立体定向手术。梁国标教授用“准、巧、安、易、广”5个字来描述无框架立体定向机器人的特点[11]。(1)在高血压脑出血治疗方面,Teernstra等[12]通过多中心随机对照研究发现,立体定向血肿清除更安全,术后便于管理,患者术后预后得到明显改善。赵全军等[13]报道了应用国产Remebot机器人系统治疗3例脑出血患者,2例血肿完全排空,1例血肿体积明显缩小。本研究应用机器人辅助血肿清除手术,3例基底节出血患者及2例脑干出血患者,术后复查CT见血肿体积明显缩小,引流管置位良好,无穿刺道出血;(2)在帕金森病的DBS治疗方面,虽然当前95%的DBS手术在传统框架立体定向下完成,然而另5%的患者应用机器人手术后,仍是取得了显著的效果,并且显示出现了在精准度和手术时间方面的优势[14]。国内淘群英教授团队首次提出“机器人校正注册法”和“陶氏DBS手术评分法”,使注册误差小于0.1mm,电极植入误差平均为(0.63±0.29)mm,改善机器人辅助DBS的疗效[15]。本研究同样绝大多数患者仍是在Leksell头架下完成手术,只2例患者接受机器人辅助手术,患者术后模拟电场与STN核团重合良好,术后即刻微毁损效应明显,术后随访程控效果满意;(3)在病灶穿刺活检方面,机器人显示出突出的表现。现代肿瘤的病理诊断依赖组织学及遗传学的综合结果,这对患者的治疗方式有决定性作用,比如颅内淋巴瘤患者,明确病理后激素冲击即能达到缩小瘤体的效果。对于颅内多发及深部的病变,手术切除的可能性很小,并且开颅取标本的风险及费用均难以接受。王佳等[16]应用国产Remebot机器人系统性对颅内病变诊断困难的患者行穿刺活检,结国在病变诊断率、精准度方面与框架组无显著差异,刘妲等[17]对26例患者行机器人辅助脑深部病变活检手术,通过多把点取标本,单次手术的活检确诊率为100%。本研究的2例活检患者通过多靶点取样,也同样均取得阳性标本,最终确诊诊断,为下一步治疗提供依据。
神经外科机器人的应用不仅限于上面的几个病种,在难治性癫痫电极植入、帕金森核团毁损、深部丘脑错构瘤致痫灶SEEG引导下热灼毁损等方面均有积极的作用,并且因其精准、智能、自动等特点,未来将越来越多的应用于临床。
参考文献:
[1]Kwoh YS, Hou J, Jonckheere EA, et al. A robot with improved absolute positioning accuracy for CT guided stereotactic brain surgery[J].IEEE Trans Biomed Eng,1988,35:153-60.
[2]Ahmed Syed Ijlal,Javed Gohar,Mubeen Bakhtawar,et al.Robotics in neurosurgery:A literature review[J].JPMA, The Journal of the Pakistan Medical Association,2018,68(2):258-263.
[3]Apuzzo ML,Chandrasoma PT,Cohen D,et al. Computed imaging stereotaxy: experience and perspective related to 500 procedures applied to brain masses[J].Neurosurgery,1987,20:930-7.
[4]Okun MS.Management of Parkinson Disease in 2017:Personalized approaches for patient-specific needs[J].JAMA,2017,318(9):791-792.
[5].Treasure J,Schmidt U. DBS for treatment-refractory anorexia nervosa[J]. Lancet,2013,381(9875):1338-1339.
[6]吴辰兴,刘锐,等.框架立体定向活检术在鞍上池小体积实性肿瘤诊断中的应用价值[J].中华神经医学杂志,2021,20(09):902-906.
[7]Maciunas RJ,Galloway RL Jr,Latimer JW.The application accuracy of stereotactic frames[J].Neurosurgery,1994,35:682-695.
[8]陶英群.从头部立体定向框架到神经外科机器人系统辅助脑深部电刺激术[J].中国微侵袭神经外科杂志,2021,26(04):145-147.
[9]XU F,JIN H,YANG X,et al.Improved accuracy using a modified registration method of ROSA in deep brain stimulation surgery[J].Neurosurg Focus,2018,45(2):E18.
[10]许峰,陶英群,等.两种注册方式对ROSA精准度的影响[J].中国微侵袭神经外科杂志,2017,22(2):80-82.
[11]梁国标,陶英群.功能神经外科精准时代的助推器——ROSA手术机器人[J].中国微侵袭神经外科杂志,2017,22(02):49-50.
[12]Teernstra OP,Evers SM, Lodder J,et al. Stereotactic treatment of intracerebral hematoma by means of a plasminogen activator. a multicenter randomized controlled trial (SICHPA)[J].Stroke,2003,34(4):968-974.
[13]赵全军,刘达,等.国产神经外科医疗机器人Remebot治疗高血压性脑出血[J].中国微侵袭神经外科杂志,2017,22(07):315-318.
[14]Neudorfer C,Hunsche S,.et al.Comparative study of robot-assisted versus conventional frame-based deep brain stimulation stereotactic neurosurgery[J].StereotactFunctNeurosurg,2018,96(5):327-334.
[15]Gong S,.et al. Assessment of deep brain stimulation implantation surgery: A practical scale[J].World Neurosurg,2020,134:e1121-e1129.
[16]王佳,赵全军,等.国产神经外科医疗机器人Remebot行无框架立体定向活检术的应用研究[J].中华神经医学杂志,2017,16(03):291-295.
[17]刘妲,陈志杰,等.神经外科机器人辅助立体定向活检在脑深部病变的应用(附26例临床分析)[J].立体定向和功能性神经外科杂志,2021,34(01):4-8.
【作者简介】周光勇(1990.02-),男,汉族,安徽滁州市人,硕士研究生学历,蚌埠医学院第二附属医院神经外科医师,主要研究方向:功能神经外科。
【通信作者】汪恩焕(1968.10-),男,安徽蚌埠市人,硕士研究生学历,蚌埠市中心医院神经外科主任医师,主要研究方向:功能神经外科。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



