上海元易勘测设计有限公司 上海 200135
摘要:基于华微3号无人船测量系统对浦东新区河道疏浚前后进行测量,应用结果表明,无人船进行河道疏浚检测中能有效提高数据可靠性、准确性,及时反馈河道淤泥变化情况,同时避免了人员涉水隐患,为全流域水下测量提供一种新的解决方案。
关键词:无人船测量系统、网络RTK、河道疏浚检测
浦东新区域内河道纵横,城市排污、降雨冲刷、降尘沉积等多重因素影响下容易致使河床形成淤泥,而淤积会影响到防洪、排涝、灌溉、供水、通航等各项功能的正常发挥。为恢复河道正常功能,促进经济社会的快速持续发展,有必要进行河道清淤疏浚工程,使河道通过治理变深、变宽,河水变清。而无人船测量系统是一种快速获取水域高精度地理信息的新技术,利用单波束、GNSS 和 IMU 传感器的集成提供了准确的位置和姿态数据,较传统测深技术具有更快速、更精确获取水域地理信息的优势,广泛应用于河道断面测量、水下地形测量等,为河道疏浚检测提供了一种高效率的解决方案。
1.1无人船测量系统
APACHE3 是一种便携式浅吃水船体,带有单波束回声测深仪,用于湖泊、内陆河流和沿海地区的水深测量。主控单元提供无缝4G通信,摆脱传统网桥基站和传输距离的限制。
APACHE3 USV 结合了双 GNSS 定位和航向传感器、稳定可靠的船体姿态和 IMU 传感器,允许在通过桥梁时进行不间断测量。高效的 5 m/s 电机和绝对直线技术允许在不利的电流和流动条件下以自主模式进行全自动预定路线。
APACHE3采用模块化设计,船体由船体外壳、任务模块、推进模块、数传模块、控制模块及电源模块组成;软件主要由 Auto Planner、HydroSurvey组成。

图1 APACHE3无人船
1.2 工作原理
无人船由GNSS RTK卫星定位系统和测深仪组成一套完整的测量系统。网络RTK定位技术就是基于载波相位观测的实时动态定位技术,它能够实时快速地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。
单波束测深仪的测量过程是采用安装在测量船下的发射机换能器,垂直向水下发射一定频率的声波脉冲,以声速C在水中传播到水底,经反射或散射返回,被接收机换能器所接收。设经历时间为t,换能器的吃水深度D,则换能器表面至水底的距离(水深)H为:
![]()
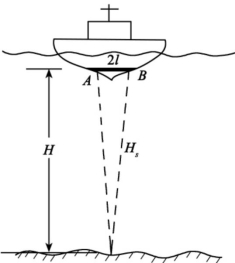
图2 回声测深原理图
为了求得实际正确的水深而对回声测深仪实测的深度数据施加的改正数称为回声测深仪总改正数。回声测深仪总改正数的求取方法主要有水文资料法和校对法。前者适用于水深大于20米的水深测量,后者适用于小于20米的水深测量。
水文资料法改正包括吃水改正△![]() 、转速改正△
、转速改正△![]() 及声速改正△
及声速改正△![]() 。
。
吃水改正:由水面至换能器底面的垂直距离称为换能器吃水改正数△![]() 。若H为水面至水底的深度;
。若H为水面至水底的深度;![]() 换能器底面至水底的深度,则△
换能器底面至水底的深度,则△![]() 为:
为:![]()
转速改正△![]() 是由于测深仪的实际转速
是由于测深仪的实际转速![]() 不等于设计转速
不等于设计转速![]() 所造成的。转速改正数△
所造成的。转速改正数△![]() 为:
为:![]()
声速改正△![]() 是因为输入到测深仪中的声速
是因为输入到测深仪中的声速![]() 不等于实际声速
不等于实际声速![]() 造成的测深误差。
造成的测深误差。
![]()
综上 ,测深仪总改正数△H为:
![]()
其中,声速改正数△![]() 对总改正数△H影响最大。
对总改正数△H影响最大。
校对法利用水陀、检查板、水听器等,实测从水面起算的准确深度,与测深仪的当前深度进行比较,进而求得回声测深仪在该深度上的总改正数△H。
回声测深仪按照频率分为单频测深仪和双频测深仪。换能器垂直向水下发射高、低频声脉冲,由于低频声脉冲具有较强的穿透能力,因而可以打到硬质层;高频声脉冲仅能打到沉积物表层,两个脉冲所得深度之差便是淤泥厚度Δh 。
![]()
2、应用实例
项目为上海市浦东新区河道疏浚断面检测包件2:包含周浦镇101条河道、康桥镇78条河道、川沙镇157条河道。为了解项目内所涉及的河道疏浚前后变化情况,需要对河道进行纵横断面测量。测区环境复杂,河流穿插分布于密林、稻田、村镇间,部分河段水深较浅等因素影响,使得传统测量工艺效率低下,而无人船凭借重量轻、易搬运、机动性好等优点非常适合测区特点。
2.1 河道断面测量
河道断面测量包括纵断面测量和横断面测量。河道纵断面是指沿河流中线和底宽位置(也有取沿程各横断面上的河床最低点)的剖面,测出中线以上(或河床最低点)地形变化转折的高程,以河长为横坐标,高程为纵坐标,即可绘出河流的纵断面图。纵断面图可以表示河流的纵坡及落差的沿程分布。河道横断面是指河槽中某处垂直于流向的断面称为在该处河流的横断面。它的下界为河底,上界为水面线,两侧为河槽边坡,有时还包括两岸的堤防。测量断面的编号应从上游至下游依次以‘0+流水号”方法编定,自上游至下游依次累积递增,主测线基本垂直设计中心线(河道中心线)或岸线布设。
在浅水区或无水区无人船无法到达就无法发挥作用,可以采用 GPS- RTK 或全站仪。这样所测量的数据就不在断面线上或者说测点在断面线两侧分布,如果这种偏离没有超过规定,可以量取测点垂直于横断面线的垂足作为测点;如果这种偏离稍稍超过规定(超过规定,需重测),为了达到数据的精确性,就需要对测量数据进行插值处理,求出实测点在测量断面线上的投影点。采用有权重的平均值法求投影点,投影点的平面坐标数据很简单,可以在图上直接获得,主要是要求出投影点的高程值。根据在断面线左右两侧的测量点,以它们与投影点的距离作为权重值求取它们高程值的平均值,作为投影点的高程。
1、断面位置选取在能够代表河道地形地貌变化的地方,保证每条断面都垂直于河道轴线。
2、横断面水下点距一般为2m,近岸处加密点距。所测的断面点点距适宜,较好地反映了河道地形变化情况,断面点距离和高程误差均≤0.1m。
3、外业工作结束后及时内业处理,对断面测量的观测及计算数据进行100%校核,对个别异常点进行筛查并比较相邻水边高程值以避免粗差。
2.2 数据处理
根据规范要求对无人船测量数据进行处理,打开 Hydro Survey 软件,点击【数据处理】-【水深取样】,软件自动加载工程文件下Depths文件夹下的原始数据(dep文件),选择要改正的dep文件,如果没有声剖不进行声速改正,可以选择点击右侧的一键改正,默认只进行姿态改正。如果需要进行声速和姿态改正,点击选项中的手动改正,进入声速改正,输入对应深度的声速数据,再点改正即可完成声速改正。然后点击跳过,来到姿态改正页面,点击改正即可完成两种改正。

图3 加载dep数据
依次处理好dep文件后,选中所有的dep文件,设置采样方式以及采样间隔,点击【等距采样】【生成- htt】,文件自动保存在工程文件目录下depths中HTT文件夹中。选择【打开 htt】,选择需要所有htt文件,选择合适的文件类型以及格式,也可以选择【文件合并】将多条测线合并为一条输出。
3、误差分析及质量精度评定
3.1误差分析
通常无人船在测量过程中受风和水流等因素的影响,会造成船体的左右和前后摇摆,即横摇和纵摇,改变测量船的姿态。直接导致换能器采集的水深数据与GPS接收机的平面数据不匹配,产生离散现象,同时测深仪的水深数据也不准确,此项误差会随着水深的增加而增大,不可忽略。因此需要利用船体上的姿态传感器,对采集的水深数据进行改正,保证测量船测得的水深数据正确可靠,姿态改正由系统软件Hydro Survey修正。
此外,无人船搭载单波束测深仪,水中漂浮物和水草等杂质容易对测深数据产生影响,不能准确反应泥面高程,需要对采集的数据进行降噪处理。
项目生产中,为保证测深数据的可靠性,作业中随机抽检无人船测深数据进行检验,使用RTK对其特征点进行采集,获得两套高程值,将两组数据进行比较,如表1所示。![]() 绝对值最大为60㎜,绝对值最小为4㎜,且误差呈正态分布,结论表明,无人船数据可靠性强。
绝对值最大为60㎜,绝对值最小为4㎜,且误差呈正态分布,结论表明,无人船数据可靠性强。
表1 无人船高程值与RTK高程值对比表
点号 | Z1 | Z2 | ∆Z | 点号 | Z1 | Z2 | ∆Z |
1 | 2.179 | 2.219 | -0.04 | 16 | 1.342 | 1.286 | 0.056 |
2 | 1.916 | 1.924 | -0.008 | 17 | 1.426 | 1.416 | 0.01 |
3 | 1.13 | 1.184 | -0.054 | 18 | 1.552 | 1.51 | 0.042 |
4 | 1.077 | 1.073 | 0.004 | 19 | 1.633 | 1.597 | 0.036 |
5 | 1.01 | 0.95 | 0.06 | 20 | 1.656 | 1.632 | 0.024 |
6 | 1.075 | 1.061 | 0.014 | 21 | 1.643 | 1.587 | 0.056 |
7 | 1.259 | 1.301 | -0.042 | 22 | 2.526 | 2.516 | 0.01 |
8 | 1.592 | 1.63 | -0.038 | 23 | 2.506 | 2.466 | 0.04 |
9 | 2.545 | 2.541 | 0.004 | 24 | 2.435 | 2.395 | 0.04 |
10 | 2.57 | 2.58 | -0.01 | 25 | 1.888 | 1.852 | 0.036 |
11 | 2.548 | 2.518 | 0.03 | 26 | 1.594 | 1.604 | -0.01 |
12 | 1.452 | 1.494 | -0.042 | 27 | 1.803 | 1.769 | 0.034 |
13 | 1.085 | 1.071 | 0.014 | 28 | 1.883 | 1.855 | 0.028 |
14 | 1.023 | 1.069 | -0.046 | 29 | 2.156 | 2.112 | 0.044 |
15 | 1.131 | 1.137 | -0.006 | 30 | 2.543 | 2.483 | 0.06 |
Z1为RTK高程值,Z2为无人船高程值,∆Z=Z1-Z2 | |||||||
3.2质量精度评定
无人船测量系统检查质量和检测方法:河道疏浚达标情况以现行《水利工程施工质量检验与评定标准》DG/TJ08-90-2014为依据,按挖泥船疏浚、水力冲挖等不同作业方式确定主控项目和一般项目确定检测方法和质量标准。
利用无人船对河道疏浚前与疏浚后进行数据采集,并采用断面法对数据进行处理,比对疏浚前后无人船测量数据,结果表明无人船在河道疏浚质量检测中具有可行性。如图4所示断面样式,同一河道同一断面处的疏浚情况。根据疏浚工艺的技术要求,为河道清淤疏浚工作提供有力的数据支撑,指导疏浚工作。
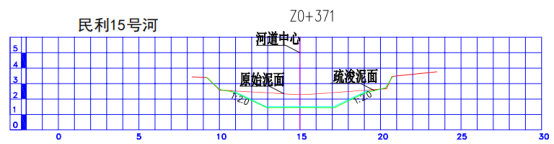
图4 民利15号河Z0+371疏浚前、后断面
本文采用APACHE3无人船测量系统对河道断面进行测量,并抽检无人船测量数据,验证无人船数据具有精度高、稳定性强的优点。利用无人船测量系统的优点,搭载单波束测深仪对河道疏浚前后数据进行比较,评价疏浚工程质量。
通过应用表明,APACHE3无人船发挥重要作用,其灵活穿梭于河道,检测数据实时展现在电脑屏幕上,不仅提高了作业效率,也保证作业人员的安全,使得河道疏浚检测工作顺利完成。本文主要围绕无人船在河道测量中的稳定可靠和实践方法研讨,不足之处是没有探究单波束高低频的测深问题,不能准确判断河道淤泥厚度。
参考文献
[1]黄珍雄.单波束水下地形测量精度的改进方法研究[D].南昌:东华理工大学.2013.
[2]SL197-2013.水利水电工程测量规范[S].
[3]DG/TJ08-90-2014.水利工程施工质量检验与评定标准[S].
[4]金久才.张杰.马毅.一种无人船水深测量系统及试验[J].海洋测绘.2013,33(2)53-56.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



