(中国船舶集团公司第七一○研究所,湖北 宜昌 443003)
摘要:岸电系统为船舶供电时采用不断电切换方式接入是岸电的核心技术之一。本文提出了一种基于虚拟同步发电机的岸电与船舶电网并网策略,使岸电逆变器具有下垂特性的同时,还具有类似于船舶同步发电机转子的瞬态惯性,其输出特性与柴油发电机类似。通过仿真研究,岸电与船舶电网并网时,并网电压和频率基本稳定,冲击电流较小,验证了控制策略的有效性。
关键词:岸电;虚拟同步发电机;重复控制
0 引言
采用岸电电源向靠港船舶供电的方式可以大大降低船舶柴油发电机带来的污染,是目前我国大力推广的方向。但是,由于大功率电力电子装置的应用仍然存在诸多问题,以电力电子装置为构架核心的岸电电源容量受到了限制,也导致了其抗扰动能力不足。在使用岸电电源向感性负载较多的船舶供电时,负载的变化引起岸电电压的波动,会影响船上电气设备运行效率与安全性。因此,岸电变流装置必须具备自动调节功能,维持输出电压稳定及满足船舶供电质量标准。
岸电与靠港船舶在线并网控制技术,能够实现岸电向船舶不间断和稳定供电。针对传统岸电控制策略频率稳定性差和不能接受船舶能量管理系统调度的缺点,本文提出了一种基于虚拟同步发电机(Virtual Synchronous Generator,VSG)的岸电与船舶电网并网策略,使岸电逆变器在具有下垂特性的同时,还具有类似于船舶同步发电机转子的瞬态惯性。岸电通过并网预同步控制与船舶电网并网,不会产生电流冲击。基于虚拟同步发电机的控制技术能够有效提高电压和频率的稳定性,改善船舶电网的电能质量,并且接受船舶能量管理系统的调度。
1 岸电系统建模与控制
本文提出虚拟同步发电机的控制策略,通过对岸电电源电力电子装置施加适当的控制算法,可以模拟同步发电机的稳态与暂态特性,增加岸电电源的抗干扰能力。
1.1 整体控制结构
岸电电源直流侧由可控整流器或者不控整流器提供直流电压,并对开关器件进行(Pulse Width Modulation,PWM)调制、变压器升压及LC滤波后,输出三相正弦电压。通过现有的虚拟同步发电机数学模型的分析,各种控制算法都需要对同步发电机的转矩方程和电气方程特性进行了数学模拟。通过比较控制算法的复杂度和系统的稳定性,考虑到变压器及其他感性元件的特性,假设岸电电源的输出阻抗和联线阻抗呈感性,采用有功-频率、无功-幅值下垂控制模拟同步发电机的外特性,从而得到岸电电源的整体控制框图如图1所示。
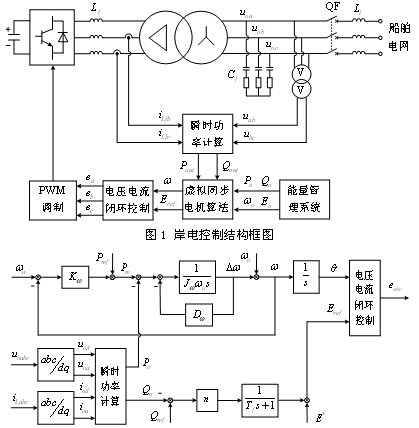
图1系统控制框图
基于虚拟同步发电机的控制算法表达式为:

式中,ωo、E*为船舶电网额定角频率和额定电压幅值,Pref、Qref 为岸电给定的有功功率和无功功率,ω、Eref 为岸电输出的角频率和电压幅值,Po、Qo 为岸电输出的有功功率和无功功率,Jω、Dω为模拟同步发电机转子转动惯量和阻尼系数。参数Kω、n 分别为有功功率-频率、无功功率-幅值下垂系数,按照式(2)求解。
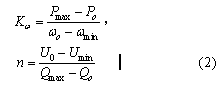
式中,Pmax、Qmax 为岸电允许输出的最大有功功率和无功功率,ωmax、ωmin 为岸电允许输出频率上限和频率下限。
1.2 输出电压闭环控制
虚拟同步发电机自身控制算法中电压为开环控制,为解决岸电并网供电和岸电独立供电时的输出电压质量等问题,需要引入电压闭环控制、重复控制等控制算法。
岸电电源的LC滤波器在提高输出电压质量的同时,其谐振也会对系统稳定性造成影响,在同步旋转坐标系下对输出电压和滤波电流的直流分量进行双闭环控制,可以提高输出电压的稳态精度和动态特性。电压电流双闭环控制的具体控制框图如图2所示。图中Gv(s)为电压PI调节器,Gi(s)为电流P调节器。
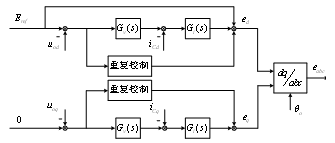
图2 双闭环控制结构框图
当前船舶越来越多的用电负载种类,尤其是整流型非线性负载,对岸电电源的输出电压质量影响很大。因此,可以在输出电压PI控制的基础上采用并联重复控制的结构来消除低次和高次谐波,控制结构框图如图3所示。
图3 PI控制与重复控制并联结构框图
重复控制结构框图如图4所示,z-N和z-M为延时环节,一般选择系数Q(z)为0.95,选择幅值补偿k为1,P(z)为二阶数字低通滤波器。重复控制系统在低频段内,系统的谐波增益较大,稳态控制精度高;在高频段内,系统的谐波衰减较快,系统的稳定性较好。

图4 重复控制结构框图
2 岸电系统仿真
本文在Matlab/Simulink仿真环境下搭建了同步发电机组模型、岸电电源模型、负载模型,验证岸电电源的基本特性及控制算法的有效性。
2.1 大负荷突加突卸
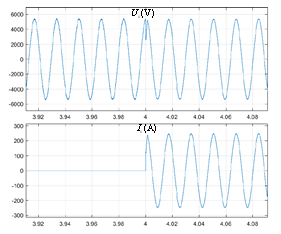
设岸电电源额定容量为4 MW,初始时刻0 s处于独立供电空载运行,4 s 时突加2 MW 阻性负载,6 s 时突卸2 MW 阻性负载。岸电电源输出电压和电流波形如图所示:其中图5为电压开环控制的岸电电源输出电压电流全过程及局部展开波形,图6为输出电压电容电流双闭环控制的岸电输出电压电流全过程及局部展开波形。
由图可以看出,岸电电源电压开环时,输出阻抗较大,电压幅值随着负载的突变波动较大;输出电压电容电流双闭环时,其稳态基波输出阻抗为0,电压幅值随着负载的突变波动较小。因此,当岸电电源独立供电时采用输出电压电容电流双闭环的控制策略具有更好的电压控制精度和动态特性。
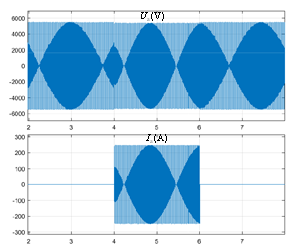
(a)全过程电压电流波形
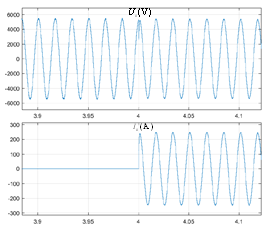
(b)突加负载时刻展开图

(c)突卸负载时刻展开图
图5 电压开环控制、突加突卸负载时电压电流波形
设岸电电源额定容量为4 MW,初始时刻0 s处于独立供电空载运行,4 s 时突加2 MW 阻性负载,6 s 时突加1 MVar感性负载,8 s 时突卸1 MVar 感性负载,10 s 时突卸2 MW 阻性负载,岸电电源输出有功功率、无功功率、频率和电压幅值如图7所示。

(a)全过程电压电流波形
(b)突加负载时刻展开图

(c)突卸负载时刻展开图
图6 电压闭环控制、突加突卸负载时电压电流波形

图7 负载变化时岸电电源输出电压频率和幅值
当有功功率变化2 MW 时,输出电压频率变化小于0.8 Hz;当无功功率变化1 MW 时,输出电压幅值变化小于70 V;本报告提出的岸电电源控制策略,抑制了负荷大幅度变动引起的频率、幅值大幅度波动,电网始终运行在允许的频率、幅值偏差范围内。

图8 无重复控制时输出电压电流波形
2.2 非线性负荷
无重复控制和有重复控制时岸电电源带非线性负载的输出电压和电流波形如图8和图9所示。图10为加入重复控制后岸电电源带非线性负载的稳态输出电压和电流波形。由于重复控制在基波和谐波频率处具有较高的增益,电压控制环并联重复控制器后,输出电压可实现较好的稳态跟踪特性,电压THD从6.5%降低到3.4%,满足了GB/T 14549-1993电能质量公用网谐波的要求。

图9 有重复控制时输出电压电流波形
2.3 船电岸电无缝切换
设岸电电源额定容量为4 MW,初始时刻0 s,岸电电源独立供电空载运行、船电带2 MW 阻性负载,5 s 时岸电预同步,9 s 时合岸电电源断路器,此时岸电切换至并网供电模式,11 s 时转移功率(船电功率转移到岸电),13 s 时分船电断路器,此时岸电再次处于独立供电模式。15 s时岸电再次预同步,19 s 时合船电断路器,此时岸电切换至并网供电模式,21 s 时转移功率(岸电功率转移到船电),23 s 时分岸电电源断路器,岸电退出运行,船电恢复运行状态。
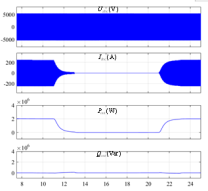
图10 船电输出电压、电流及功率波形
岸电并网与离网过程分析:
1)岸电并网时,岸电与船电预同步完成后,电压幅值和频率完全一致,9 s 时合岸电输出断路器,并网电流峰值小于20 A;
2)11 s 时船电2 MW有功功率完全转移至岸电,可以基本实现船电输出断路器小电流分断;
3)岸电离网时,岸电与船电预同步完成后,电压幅值和频率完全一致,19 s 时合船电输出断路器,并网电流峰值小于20 A;
4)21 s 时岸电2 MW有功功率完全转移至船电,可以基本实现岸电输出断路器小电流分断;
5)当岸电并网运行时,存在电网中有功无功功率耦合问题,这是由于联线阻抗压降造成的,设计合适的控制参数或补偿算法可以减小甚至消除有功无功之间的耦合度。
3 结论
本文提出一种适用于岸电与船舶电网并网的基于虚拟同步发电机原理的控制策略,同时增加了电压闭环和重复控制,改善了输出电压电能质量,同时岸电能够接受船舶PMS的直接控制。仿真结果验证了控制策略的有效性,该控制策略容易实现,与传统下垂控制策略相比,其岸电与船舶电网的切换过程平滑,并网后在负荷波动频繁的情况下可以减小电压和频率与额定值的偏移量,提高船舶电网的频率稳定性。
参考文献
[1]王栩生, 王耿芳. 高低压变频岸电装置结构型式分析[J].港工技术, 2015, 52(2): 42-44.
[2]郜克存, 戴瑜兴, 李加升. 一种新型电子静止式岸电电源[J]. 电力电子技术, 2011, 45(2): 86-88.
[3]侯珏. 船舶与岸电并网控制策略研究[J]. 船舶工程, 2017, 39(1): 86-90.
[4]郜克存, 毕大强, 戴瑜兴. 基于虚拟同步发电机的船舶岸电电源控制策略[J]. 电机与控制学报, 2015, 19(2):45-52.
[5]俞晓. 到港船舶使用岸电的环境效益和经济效益研究[D]. 上海: 复旦大学, 2013.
[6]孙永涛. 靠港船舶供岸电电源技术及自动并车系统研究[D]. 武汉: 武汉理工大学, 2012.
[7]陈枫, 应鸿, 徐鲲鹏, 张海波, 胡晓玥. 船舶岸电电源多机并联的并网无缝切换技术的研究[J]. 电气工程学报, 2017, 12(4): 33-37.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号