(中国船舶集团公司第七一○研究所,湖北 宜昌 443003)
摘 要:利用虚拟仪器的概念,采用Visual C++和LabVIEW设计和开发了水声导航系统目标模拟器。主要介绍了模拟器整体结构,着重研究了软硬件实现方法。目标模拟器在实验室里模拟15个海底阵元水声基阵的应答声信号,提供测试水声导航系统所需的应答声信号。通过实验室与水声导航系统的联合调试,证明模拟器符合调试要求。
关键词:水声导航系统;模拟器;虚拟仪器
0引言
水声导航系统海上作业区域大、潜标数目多、操作复杂,为确保海上试验的成功,系统工作状态的检验是必要的,这也是水声导航系统模拟器的主要任务,同时也是日常设备保养和定期检查必不可少的设备。绝大多数传统模拟器采用微型计算机+数字信号处理器件(DSP)+数模转换(D/A) 的方式。为满足某研练任务对测控区域的要求,我们对水声导航系统软件及阵型进行了改造,原有的水声导航系统模拟器不能满足对系统实验室测试的要求,但是鉴于传统目标模拟器加工工艺复杂、开发成本高、周期长、升级改造困难等特点,本文提出应用虚拟仪器技术,用Visual C++和LabView及少量硬件开发目标模拟器。虚拟仪器(Virtual Instrument)即VI,是现代计算机技术和仪器技术深层次结合的产物,是以通用计算机为核心,根据用户对仪器的设计定义,用软件实现虚拟控制面板设计和测试功能的一种计算机系统。这样本目标模拟器省去了电路设计、焊接等环节,利用NI现有的模块完成输入、输出,大大缩短了开发成本及周期。
1 目标模拟器设计原理
1.1水声导航系统的原理
水声导航系统是潜艇试验鉴定必须的测量设备,其任务是为潜艇在水下提供精确导航定位,解决潜艇水下不同工况条件下的航行机动性能参数测量问题,保障潜艇在水下试验中能安全、可靠、协同地机动,是靶场重要的基础测控设备,系统也可用于作战部队反潜训练。工作原理如图1所示,在海底或海面布设水声测量阵元,通过测量目标声源主动或被动应答发出的声信号传播到各个接收阵元的时延(对同步系统)或时延差(对异步系统),采用球面交汇(对同步系统)或双曲面交汇(对异步系统)来确定目标在发射信号时刻的水平位置。

图1 水声导航系统工作原理
1.2水声导航系统目标模拟器设计
水声导航系统目标模拟器(以下简称模拟器)的主要任务是模拟目标声源主动或被动应答发出的声信号传播到各个接收阵元的时延(对同步系统)或时延差(对异步系统)。近年,随着研练任务的不断推进,水声对抗训练的的海区不断扩大,为了能保证水声导航定位系统的精确性,我们采取了带有中继潜标的海底应答器阵,相应的对浮标、软件等进行了修改,本模拟器主要用于对整个修改后的系统综合状态进行检查。
根据实验室测试要求,通过VC完成各种控制参数设置,根据给定参数产生模拟目标的运动轨迹,再根据设定的目标速度和同步周期对轨迹采样,解算目标在各轨迹点发出的询问信号及应答器应答信号到达各浮标的时延,或应答信号到达目标当前位置时延,并记录对应应答器编号,最终以文本文件保存。利用LabView软件读取文件并产生浮标收到的目标询问及应答器应答的模拟信号数据,通过串口将信号数据传送至NI PXI-4461数据采集(DAQ)模块,输出模拟电信号,最终通过连接换能器发出模拟声信号。结构如图2。

2 目标模拟器硬件实现
根据虚拟仪器的特点,本目标模拟器只要求少量的硬件支持,其构架包括计算机、D/A输出、高精度数据采集(DAQ)模块PXI-4461和换能器,如图3所示。计算机用于参数的设置、信号的生成及输出。NI PXI-4461是一款专为高通道数的声音振动应用而设计的高精度数据采集(DAQ)模块,具有2路同步采样模拟输入通道和2路同步更新模拟输出通道。换能器完成由电信号到声信号的转换,达到在实验室对声信号检测的目的。
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
3 目标模拟器软件实现
3.1 Visual C++生成时延数据
本程序已对基本参数进行初始化,包括工作参数、声学参数、目标参数、阵元参数、浮标等,同时也可通过对话框对各参数进行修改,界面如图4。假设水下目标做匀速直线运动,在测控区布放15个海底应答器,阵型及应答器编号如图5所示,根据设定的目标速度和同步周期对轨迹采样,解算目标在各轨迹点发出的询问信号及应答器应答信号到达各浮标的时延,或应答信号到达目标当前位置时延,给出时延值。鉴于无线浮标传送距离的限制,系统设计布放2个浮标,当目标在左半区域活动时,由浮标1接收左半部分靠近目标六个应答器(1,2,3,6,7,8或6,7,8,11,12,13)的信号;当目标在右半区域活动时,由浮标2接收右半部分靠近目标六个应答器(3,4,5,8,9,10或8,9,10,13,14,15)的信号;并且较远一排应答器的信号由中间一排应答器中继给浮标,即t时刻目标位置如图,浮标1收到时延值为目标到12号应答器的时延t1,及应答器12到应答器7的时延t2和应答器7到应答器2的时延t3。

图4 参数设置及修改

图5 阵型示意图
3.2 LabVIEW生成模拟信号
LabVIEW完成目标模拟器的主界面设计及生成模拟信号。主界面界面包括参数输入、应答信号输出、电压控制等。通过主界面能够输入各种诸如时延数据文件路径、开始周期、结束周期等参数,在图形显示区实时显示根据时延数据和应答器的编号产生模拟信号,如图6所示。
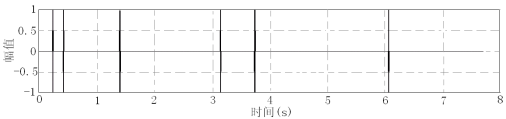
图6 LabVIEW生成的模拟信号


图7 假设轨迹图8 水声导航系统目标模拟器主界面
4 结论
图7为预设的目标延编号为10,9,8,7应答器上方直线运动的轨迹,图8为水声导航系统软件通过接收本目标模拟器产生的应答器声信号解算出的目标轨迹,通过比较可知,本目标模拟器可仿真水声导航系统的应答声信号,能够在实验室仿真研练保障的测试过程,对整个水声导航系统进行检测,基本满足设计要求,并已完成某研练任务水声导航系统实验室联调保障。
参考文献
[1] 张文军.严胜刚.基于PXI的水下目标辐射噪声和信号模拟器[J].声学技术 2007,26:584-587.
[2] 于平.两种水声导航定位算法的应用与分析[J].靶场试验与管理.2004(1).
[3]张毅刚.虚拟仪器软件开发环境LabWindows/CVI6.0编程指南[M].北京:电子工业出版社,2002:37-57.
[4] 杨有东, 汪琛沉.Visual C++程序设计全程指南[M].北京.电子工业出版社,2009.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2025 期刊网(www.qikanchina.com) 琼ICP备2021005105号