中航西安飞机工业集团股份有限公司 陕西西安 710089
摘要:随着我国航空工业的迅速崛起,推动着飞机制造朝着智能化方向发展,智能运输在飞机制造中也发挥着越来越重要的作用。自动导引运输车(Automated Guided Vehicle,简称 AGV)作为飞机制造运输领域中的关键设备,具有结构简单、路径灵活、转弯半径小等诸多优点被广泛的应用于生产物料搬运、关键设备搬运等环节。本文设计的高精度双车联动转运装置用于完成对大尺寸的飞机零件及大尺寸工艺设备的运输,主要由行走系统、升降称重系统、导航系统、调度系统等组成,两辆AGV小车既可独立运作,也可以进行协同搬运。
关键词:飞机制造;AGV;双车联动;运输
引言
世界主要国家都将航空工业定义为国家战略性产业,既是一个国家国防安全的重要基础,也体现了一个国家的工业发展程度。中国航空工业作为我国军工制造的重要力量,其发展水平代表着我国制造业的先进水平和发展方向。随着科学技术的发展,航空工业的制造朝着信息化、数字化的方向快速发展,其中,智能化运输是飞机制造过程中数字化转型及发展中的关键环节,智能化及自动化程度越来越高,推动飞机制造运输领域自动化系统和柔性制造系统不断变革。
自动导引运输车作为飞机制造运输领域中的关键设备,能够沿着给定路径行驶,运载效率高、灵活、实用[1],是一种装备定位导航装置,能够替代工人完成繁重、重复的体力劳动。在降低成本的同时提升运输效率,具有结构简单、路径灵活、转弯半径小等诸多优点,广泛的应用于飞机制造领域中的生产物料搬运、设备搬运等环节[2]。
本文针对飞机制造中大尺寸零件及大尺寸设备的运输需求,设计了一套高精度双车联动转运装置,两辆AGV小车既可独立运作,也可以进行协同搬运,主要由车架、行走系统、升降称重系统、控制系统、导航系统、安全系统、遥控器、供电系统、调度系统等组成。
1.总体设计方案
本文设计的高精度双车联动转运装置主要用于大尺寸零件及大尺寸设备的运输。如图1所示,AGV采用2舵轮搭配4个万向轮,同步4点电动顶升,采用磁导航,并配有无线遥控器和称重装置,可独立运作,也可联动运行。AGV使用的电机、指示灯等元器件选择防爆元器件,同时整车做防爆处理,此外还包括配套使用的自动充电站和调度系统。在对大尺寸设备运输时,两辆AGV车同时运动至设备正下方,到达指定位置后同时顶起,再通过遥控控制转运至其他位置,运输过程如图2所示。
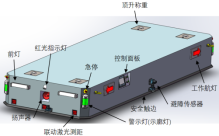

图1 高精度双车联动转运装置总体设计示意图

图2 运输过程示意图
2. 详细设计方案
2.1 行走系统设计
整车共包含2套舵轮模组以及4套万向轮,如图3所示。舵轮驱动模组单元由驱动轮、伺服驱动电机减速器、电磁制动器、齿形回转支承、伺服转向电机减速器、旋转角度传感器构成。驱动轮采用橡胶胎,车轮尺寸为标准车轮,便于维护更换。在普通路面上正常使用时不会损伤路面。驱动电机及转向电机选用防爆电机。
当AGV处于空载状态或经过凹陷地面时,悬挂弹簧可将舵轮下压贴紧地面,确保驱动轮有足够的压力,避免打滑。随着AGV载荷增加,悬挂弹簧被逐步压缩,载荷逐渐被分配到万向轮上,避免舵轮过载。制动系统采用电磁失电制动的方式,车辆在停车、待机或者意外断电时处于制动状态,不会发生自行移动现象。只有制动器通电以后,车辆才可以正常运行。


图3 行走系统设计
2.2顶升及称重系统设计
顶升系统采用丝杆升降机,四套丝杆升降机由一套电机与减速机做动力输出,经过换向减速器与同步连杆将动力平均传递给每个丝杆升降机上,最终实现4套升降机的同步动作,如图4所示。采用一拖四的机构,四个升降机构靠机械传动结构,可以通过总控柜控制升降电机实现,具有高同步性。顶升系统举升扭矩大,且蜗轮蜗杆、丝杆螺母等均有自锁,有较高的安全性,确保顶升过程中台面可在规定行程的任意高度停止锁住。同时在意外断电时,升降机构可停止在当前位置并锁定。顶升装置配有激光测距传感器,可检测实际顶升高度,并显示在控制面板上。


图4 电动顶升系统示意
称重传感器安装在上顶板和下底板之间,上顶板通过导向销连接到下底板的直线轴承。当AGV爬坡、通过障碍物或顶升顶偏时,可以有效减少传感器侧向受力,避免传感器损坏。如图5所示,上顶板装有定位销,用于导向和固定。上顶板开口,并安装接近传感器,可检测是否顶升到位。顶升过程中,超过特定顶升高度未检测到接近传感器信号时,AGV可自动停止顶升,并报警提示。

图5 称重系统示意
2.3导航系统设计
AGV使用磁条导航方式运行,如图6所示。在AGV运行路线上预铺好磁条和RFID芯片,AGV小车会根据命令沿着磁条铺设方向行驶,并通过读取RFID芯片信息确定位置。导航系统具有自动找正功能,AGV通过磁导航传感器检测磁条相对传感器的位置,当位置偏移时,AGV可自动微调行进角度来确保始终运行在指定路线上。当磁条完全偏离传感器感应区域后,AGV会自动停止并报警。AGV导航精度±5mm,停车精度±5mm。AGV在车体四周各布置一个磁导航传感器,确保在各向移动时都具有良好的导航纠偏效果。

图6 导航传感器示意
2.4 安全系统设计
AGV设计有两种避障方式:非接触感应式避障及接触式避障。非接触避障主要采用激光探测器,可实现一定范围内的远距离障碍物检测;接触式避障采用的是安全触边,可实现物理碰撞后通过形变产生检测信号实现障碍物检测;二者结合使用形成一套安全防护网,保证车辆运行过程中对设备及外部人员的安全。
单台AGV配有7个非接触式避障传感器。前车在车体前部和左右分别安装有2个避障传感器,后车则是在车体后部和左右分别安装有2个避障传感器,传感器采用水平安装和垂直安装结合的方式。垂直安装的避障传感器可倾斜一定角度安装,可提供更好的垂直避障效果。当AGV顶起后,两车伸出的4个避障传感器可提供整个组合前后侧水平和垂直方向的避障检测,两车侧面安装的共计8个避障传感器则可提供整个组合两侧水平和垂直方向的避障检测,如下图所示:


图7 前后侧避障范围示意图 图8 两侧避障范围示意图
接触式避障为安全触边,采用压敏式材料,安装在车辆下端,遇挤压变形后可输出信号,得到信号后控制系统强制停车并发出警报。非接触感应式避障及接触式避障相结合,AGV和运输物品四周的水平和垂直方向都可以得到全面有效的保护。
3 总结
设计的高精度双车联动转运装置能够有效满足飞机制造过程中大尺寸零件及专用工艺设备的运输,提高飞机制造领域中物流运输的效率。随着技术的发展,社会工作越来越追求智能化和机械化,AGV车在运输行业中占有重要的地位。本文设计的高精度双车联动转运装置可以实现高精度的协同配合,并且操作方便,通过调度系统将过程信息进行搜集,实现了飞机制造运输的数字化装配。AGV车具有高效、准确和能够长时间作业的优点,在飞机制造中广阔的运用前景。
参考文献:
[1] 贺长林.基于双目立体视觉和侧向路径的AGV导航技术研究[D].西安: 西安理工大学,2008.
[2] 吴国荣. AGV群控技术研究 [D]. 济南大学. 2020

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



