常州中车瑞泰装备科技有限公司 江苏常州 213011
摘要:随着高铁和城市轨道交通在国内的快速发展与应用,为适应车辆检修与站内小批量调车作业的需求,设计开发了纯电动公铁两用牵引车。牵引车的电气控制系统是基于CAN总线的集中控制方式,可以高精度地满足操作人员对牵引车平移、转向、回转、牵引等功能的控制。牵引车便捷的公路与铁路两用切换,实现了调车人员对轨道车辆的停车入库、牵引对位、场内转移的功能需求。
关键词:公铁两用;牵引车;电控系统;
1 引言
公铁两用牵引车是一种既能在公路上行驶,也能在标准轨、米轨和宽轨铁路行驶的工程车辆,它结合了汽车和内燃机车的各自特点,可以在短区间进行列车牵引、货物转线等场景下发挥自己的天然优势。传统的公铁两用牵引车大多为内燃机驱动,噪声大、尾气重,不适用于封闭的环境[1];传统的以电动叉车为基础改造而来的公铁两用牵引车,其液压系统转向存在无法实现反馈的问题,难以实现快速准确的转向要求。
本文研制的纯电动公铁两用车可广泛应用于各铁路公司下属的大机段、车辆检修段、大修段和各城市地铁公司下属的车辆检修中心等列车检修牵引作业。同时其可作为一个移动平台,通过对平台进行不同属性的改造,加装不同的工作装置,如起重装置和云车平台,可以完成多场景下铁路线路及设备检测和修理。
2 公铁两用牵引车
2.1外观结构

图1 QY-C型牵引车外观(500T)
公铁两用牵引车外观结构如图1所示,主要由元器件安装底盘,工业铅酸电池,舵轮驱动驱动单元,电气控制柜、液压导向系统,车钩牵引等组成。牵引车的传动方式采用的是四轮独立驱动,四舵轮独立转向方式,采用8个数字驱动器对整车四舵轮单元进行驱动,单车可完成单列500吨的列车牵引,当前牵引车已经实现了产品的系列化。

图2公铁两用牵引车结构图
机械结构如图2所示,舵轮驱动单元由走行牵引电机,减速箱,转向电机、电机刹车、转向位绝对值编码器、转向直齿轮副,耐磨橡胶轮组成。牵引车整车采用低压纯电池驱动,简化牵引车的机械结构,提高能量转换效率,节能环保、烟气零排放,能够在检修基地内完成对各型机车的牵引、调车,并实现与不落轮镟的准确定位。
电气控制柜由车载PLC控制器、车载无线接收器、位移传感器、压力传感器、数字电机驱动器、手持无线遥控器组成。车辆控制系统通讯采用CANopen通讯协议,以CoDeSys作为软件程序环境,进行中央控制系统程序编译。牵引车整车具有360度任意角度直线行走能力,也具有以车体中心为原点进行原地回转功能,面对行车路线的障碍物时可以进行多级调速,在障碍物前极限距离自动停车功能。
2.2 工作原理
2.2.1 公路模式
通过控制车载液压单元,提升牵引车前、后导向轮,牵引车运动状态模型如图3所示。在转向控制上,未采用传统车辆的机械差速结构,依靠电子差速和转矩控制相结合,根据控制器接受的控制指令和四个走行车轮电机实时转矩,进行四个车轮之间的速度差调整,完成转向,并实现如下走行功能:
(1)直线模式-四个驱动轮转角方向相同,转向电机驱动转向直齿轮副,使四个舵轮转向角度相同,走行电机的行走速度相同,此时牵引车实现直行、平移或对角线平移功能;

图3 直行平移
(2)曲线模式-转向电机驱动转向直齿轮副,使左右两侧橡胶轮公法线在车辆外重合[2]如图4所示,整车转向圆心位于整车外部一侧,行走电机驱动两侧橡胶轮(四个走行电机速度并不一致),则牵引车实现转弯功能;

图4牵引车运动状态图 图5 转弯原地回转图
(3)原地回转模式-转向电机驱动转向直齿轮副,使左右两侧橡胶轮公法线与车辆中心重合如图5所示,以车辆中心原点进行原地圆周360度转向,实现牵引车在狭小空间内任意角度的变换。
2.2.2 铁路模式
液压导向系统接收控制器指令,使整车四个位置的导向轮下插嵌入轨道,通过导向轮与钢轨接触耦合起到导向作用,防止牵引车脱轨。此时整车四个橡胶轮在转向驱动器和转向电机的控制下处于零度方向与钢轨方向平行,走行电机驱动四个橡胶轮以相同的速度在铁轨上运行,牵引车沿着铁轨方向行走,实现铁路模式下牵引功能,在铁路牵引模式下,整车的曲线行走功能和圆周回转功能均被程序禁止。
两种模式实现了牵引车纵向平移,横向平移,对角线平移,转弯、圆周转向,轨道牵引等功能。保证了牵引车能自由行走,在狭小的空间内也能快速到达指定现场进行调车牵引作业。
3 公铁两用牵引车硬件设计
3.1 总体设计
电气控制系统中控制单元车载PLC实现对整个车载系统的控制,无线遥控器和避障数据采集单元作为车辆外部信号输入,泵站和油缸进行相应的外部输出,触摸屏作为人机界面进行故障提示和紧急情况下应急操作,数字驱动器驱动舵轮完成车辆走行和转向,蜂鸣器、喇叭、转向指示灯等设备进行牵引车状态提示,车钩升降单元由步进电机驱动器、步进电机、滑铁模组、车钩升降器等组成,
可调整车钩升降对不同车型的车辆进行牵引。
3.2 硬件选型
主控制器选用禾晟微电子C490可编程控制器,具有两路CANOpen接口,实现与行走驱动器、转向驱动器、转向编码器、遥控接收器的和远程IO进行CAN总线通讯,如图6所示。
3.2.1舵轮
转向电机、走行电机、行星减速机、走行齿轮箱采用一体化机械结构,集转向、牵引行走功能为一体,该结构为舵轮,可以载重和牵引大吨位货物,具有集成度高、部署简易、响应快、精度高,适配性强等优点
3.2.2 电机数字驱动器
电机驱动器选择为支持CAN通讯的数字驱动器,功率为80V350A,逆变频率为8000Hz,驱动舵轮装置上的转向电机和牵引行走电机,通过驱动器与电机自带的编码器的耦合,实现对牵引电机和转向电机的精确控制。
3.2.3 编码器
转向电机的位置反馈采用支持CANOpen绝对值编码器,具有抗干扰,分辨率高等优点(单圈13,多圈18),实现对橡胶轮转向角度的高精度实时反馈。
3.2.4 遥控器
遥控器选择为支持CANOpen通讯,具有抗扰能力强、单机通讯能力200米、通讯频率为915MHz的工业级遥控器。

图6 牵引车硬件结构框图
4 公铁两用牵引车控制系统设计
4.1 总体设计
整车各模块之间通过CAN总线进行通讯,采用CANopen通讯协议,控制系统软件结构如图7所示。

图7 总线通讯结构
PLC作为控制系统CANOpen主站,数字驱动器、绝对值编码器、遥控器、触摸屏和远程IO作为Slave从站。走行数字驱动器和转向数字驱动器挂载在PLC的CAN1通讯接口,CAN1通讯接口上驱动器两个一组,组与组之间通过CanBrige相连,可以有效避免CAN总线由异常电压烧毁所有CAN节点的可能性;绝对值编码器、遥控器、触摸屏、避障单元,远程IO挂载在PLC的CAN2通讯接口,通讯波特率设置为250kB/S。
4.2 控制程序设计
可编程控制器以德国3S公司的CoDeSys作为软件开发平台。CoDeSys(Controlled Development System)是PLC的一种开放的开发环境,包含全部IEC 61131-3的语言:ST(结构化文本)、SFC(顺序功能图)、LD(梯形图)、FBD(功能块)、IL(指令表),支持从经典PLC编程到面向都对象编程。
本文中牵引车的核心控制系统程序采用ST语言和LD语言相结合进行开发,整车中电子差速算法、PID调整、通讯模块均、数据处理等采用ST语言编制,导向轮动作、声光显示提醒通过LD语言进行开发。
4.2.1 控制程序组成
控制程序主要由初始化模块、心跳检测模块、CAN1通讯数据处理模块、CAN2数据处理通讯模块、电子差速模块、PID调整模块、角度计算模块、输入信号处理模块、输出信号处理模块等组成。
(1)初始化模块是主机向各个Slave从站进行输入输出端口配置、控制参数读取,初始信息发送,接受Slave从站信息,并判断当前Slave从站状态;
(2)心跳检测模块检测外围各个从站通讯有无异常,以心跳的形式进行判断,当某个设备从站出现异常后,主站在规定时间内接收不到从站信息,判断该从站设备出现异常,进行故障提示;
(3)CAN通讯数据处理模块用于主站和从站的数据转换、数据处理和信息传递;
(4)电子差速、PID调整角度计算模块主要是对行车时各个电机速度、转向电机角度和转矩进行实时匹配,满牵引行驶需求;
(5)输入输出信号处理对整车位移传、压力感器信号、遥控器、远程DI和DO信号进行处理输出。
4.2.2 控制程序运行
控制程序上电之后进行系统初始化,检测外围各个从站节点能否正常工作,并一直对外围从站节点进行心跳检测,出现心跳停止现象时整车立即主动停止工作,PLC控制器接收遥控器指令进行预工作模式的判断,按照公路模式和铁路模式进行不同的选择,分别执行不同的控制策略,根据绝对值编码器和增量编码器采集得到的数据与数学模型理论数据预期值进对比,对八个驱动器进行不同的信息数据处理输出,进行PID调整,以保证整车正常运行,整车控制程序运行的工作流程如图8所示。
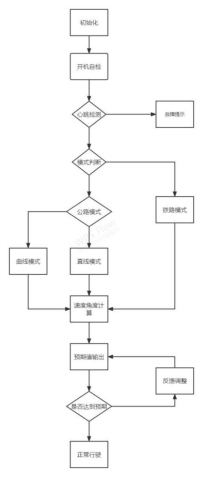
图8 控制程序流程
牵引车行驶速度设定为两档,低速牵引档速度3km/h,高档运行速度5km/h,行驶过程中,当整车速度为零时,电动闸抱死走行电机,牵引车自动停止。
5 结束语
完成了电动公铁两用牵引车硬件控制系统的平台搭建,利用CANopen总线技术,以CoDeSys为开发平台,完成了软件控制策略程序的编写以及整车控制系统的联机调试。牵引车具有360度任意角度直线行走、原地回转以及行进中预见障碍多级变速功能,实现了牵引车自由行走和铁路牵引。本纯电动公铁两用牵引车平台适用于轨道列车维修与养护,通过配置不同的装置能满足不同作业场景的需求,可广泛应用于国铁车辆检修段、大机段、地铁检修维护中心以及运营单位小批量的调车牵引作业。目前已经在无锡地铁、西宁大机段、呼和浩特大机段、乌鲁木齐大机段、宁波地铁、神华公司、尼日利亚铁路等进行广泛运用,客户反馈效果良好。
参考文献
[1] 倪志伟,郑松林,杜月鑫.陆轨两用车设计中的关键技术研究[J].机械制造,2007,45(516):15-17.
[2] 韩晓峰.铁路公路两用牵引车电子差速器设计研究[J].电子测试,2013,(3):42-45.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



