(上海慕为技术工程股份有限公司,上海 200082)
摘要:汽车制造智慧工厂作为实现智能制造及物流精细化管理全部业务流程体系的重要载体,借助科技手段构建“可测可控、可产可管”的集成环境,促进离散型制造业的柔性化、流程型制造业的智能优化,是制造企业突围的关键。高精度的位置数据作为智能工厂数据流的重要组成,是智慧工厂业务流中的重要数据指标,在三维孪生场景中构建精确的空间位置数据、实时性以及覆盖完整性,是数字化智能工厂精益生产的重要评价维度。本文针对使用UWB定位的数字孪生应用在改善汽车制造业柔性生产过程中车辆及物料流程管控中的复杂难题进行探索和研究。
关键词:UWB定位;数字孪生;汽车制造;精益生产;智能制造
Application of digital twinning based on UWB positioning in automobile manufacturing
HOU Yaqi
(Shanghai Muwei Technology Engineering Co., LTD,Shanghai 200082,China)
Abstract: As an important carrier to realize the whole business process system of intelligent manufacturing and fine management of logistics, intelligent factory of automobile manufacturing is the key for manufacturing enterprises to break out by constructing an integrated environment of "measurable and controllable, production-controllable" with the help of scientific and technological means, and promoting the flexibility of discrete manufacturing industry and intelligent optimization of process-based manufacturing industry. As an important component of smart factory data flow, high-precision location data is an important data index in smart factory business flow. Constructing accurate spatial location data, real-time performance and coverage integrity in three-dimensional twin scenes is an important evaluation dimension of lean production in digital smart factory. In this paper, the application of digital twinning based on UWB positioning is explored and studied to improve the complex problems of vehicle and material flow control in the flexible production process of automobile manufacturing industry.
Key words:UWB positioning; digital twin; automotive manufacturing; Lean production; intelligent manufacturing
0引言
汽车制造行业是制造业智能制造的引领者。近年来国内汽车行业,尤其是新能源、智能汽车技术的快速发展,背后离不开各类新技术革新强有力的推动支撑。高精度的UWB位置服务可以帮助工业企业进行精益化生产,同时随着实时三维渲染游戏引擎及XR(Extended Reality)技术被逐渐引入制造业数字化软件体系中,三维数字孪生技术正在成为制造业数字化转型的重要技术支撑之一,两者相互融合可大大提升汽车智能制造精益生产过程中数字化水平。
1.车间定位行业背景
汽车制造属于典型的离散制造生产,整个生产制造流程异常复杂,从车型的研发设计,到制造的冲压、焊装、涂装、总装,再到后期的成品入库等众多步骤,是一项非常复杂且庞大的工业化生产。在现阶段车企的面临诸多问题,如车辆装配生产各个工序环节实际时长难以精确统计和实时分析,在产车辆数量及其状态难以实时统计,车辆数量多,移动和停放不规律,造成找车困难等等。其中总装车间生产组装流程复杂、操作人员多、信息量大、外来零部件及总成部件集中、质量控制管理程度难等特性,是工厂实施智能制造时需要重点关注的焦点。部分企业采用RFID标识手段进行定位,但是由于RFID定位的精度取决于RFID读卡器和RFID标签的距离,因此精益化的汽车制造与装配需要在每个生产点及每辆待装配的车辆上安装RFID的读卡器,以实现车辆在流水线上的定位功能。这就需要大量安装RFID的基站/读卡器,导致成本支出的大幅增加,同时任何一个基站/读卡器出现问题,都必须马上处理,否则会导致整个流水线出现等待,进而影响整个流水线的作业,造成生产的停工和损失,同时对大量的RFID基站/读卡器的设备维护也造成了很大的负担。
基于上述的背景,数字化转型成为了传统车企革新的突破点,通过将新一代信息技术与生产制造技术的深度融合,实现车间的智能化,自动化和高效精益管理。面对这些实际问题,在车间现有智能化建设基础上引入UWB高精度定位系统,对原有的智能化系统进行升级并付诸实践,实现生产车间的信息互联互通,生产全过程工序优化,车辆检测问题追溯等,让车间更智能,更透明。
2.1 UWB技术原理及特点
UWB(Ultra Wide Band)超宽带技术是一种无线载波通信技术,采用纳秒级的非正弦波窄脉冲传输数据。其具有传输速率高、抗干扰性强、发送功率小等优势,可以在功耗、造价、精度、实时性、通信能力以及可扩展性等众多方面满足汽车制造不同场景的定位应用。另外,UWB定位技术在室内等密集多径场所的高速无线接入,与RFID、wifi、ZigBee等定位技术相比,在零部件使用状态跟踪、工器具使用监控、作业人员管理、返修产品/车辆状态跟踪方面具有较大的相对优势,UWB又能与这些技术形成互补。
2.2 车间UWB定位系统通信架构
高精度定位系统通过灵活的实施架构实现不同应用环境下定位功能。系统网络包括UWB定位基站、终端接收单元、网络数据通道以及部署在服务器上的定位引擎。其中,UWB定位基站安装部署于车间区域的边缘,对该区域进行信号覆盖;移动终端单元通常贴附在定位对象表面,所定位对象可以是人员或者设备;当可移动终端进入基站所在的信号覆盖范围后会自动与基站建立数据通信,UWB基站依据TDOA算法对数据进行计算处理,然后通过数据传输通道发送至定位引擎服务器,进而获取移动终端的坐标位置。
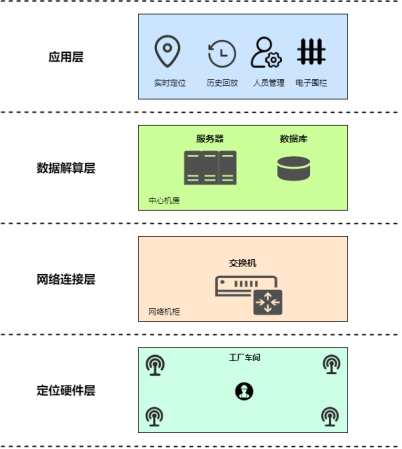
图1 车间UWB定位架构
如图1所示UWB二维定位方案,以汽车制造工厂为例,在总装车间部署一定数量的基站,通过PDA扫描随车标签与车辆VIN码,实现UWB标签与车辆的绑定,通过定位标签UWB通信方式将解算的位置信息发送给定位基站设备后,通过定位基站上的通讯模块将位置信息发送到上位机软件系统,与数字孪生系统及MES的联动对接,实现车间生产的智能监管。
在工业制造领域,数字孪生对生产车间的精确虚拟复制正掀起一场数字化的革命,通过结合传感器采集的实时数据,复杂的计算机模型几乎全要映射到某项产品、流程或者服务,“数字孪生+XR技术”打通了隔离在物理世界和数字世界之间的墙。首先,基于实时3D渲染引擎及三维建模技术,对产线或者工厂构建1:1虚拟仿真场景,仿真场景中的模型各个静态数据和真实的产线是一致的,更重要的是,它能同步真实环境数据,实现实时数据反应和同步,体现出真实的工厂运行状态。其次,数字孪生可基于此来做仿真、模拟和预测。比如在产线还未建设时,可以在虚拟层面基于数据做虚拟设计,还可以面向虚拟原型进行编程和开发。尤其是柔性产线,往往需要开发控制软件、PLC、MES和其他相关的IT系统,必须要进行调试。数字孪生可以在数字世界进行虚拟调试,一方面帮助工厂更早开发软件,另一方面,万一发生错误也不会造成实际损失。如图2所示数字孪生车间虚拟场景,在使用阶段,工厂可以基于数字孪生在数字化中心或者中控室把所有的运行数据和生产数据集中在数字孪生上,在大屏上就能看到整个运行状态,十分直观甚至支持远程操作。


图1 车间三维数字孪生系统
4.1 UWB与数字孪生系统融合通信架构
通过将UWB定位数据融合于数字孪生软件系统中,定位系统通过采集部署在工厂的标签基站数据,完成人员/设备位置解算,提供基于位置的各类功能应用。数字孪生系统作为三维可视化端,在三维场景中展现所有来源于车间的位置状态,提供各个区域人员/车辆的位置信息以及位置检索,并通过大屏可视化统一展现。如图3中将UWB定位系统与三位数字孪生场景进行融合,实现真实现场的人员和设备与虚拟场景中角色和设备模型动态映射。
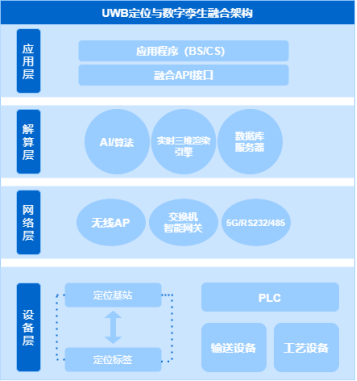
图3 车间UWB定位与数字孪生系统融合架构
4.2 基于UWB的数字孪生车间应用
汽车生产过程中基于UWB定位技术的优势,并综合利用三维引擎及工业物联网等技术,形成具有一定三维感知能力、AI算法识别判断能力的智能系统,具有管理系统化、数据智慧化、网络协同化、决策智能化等突出特点。
1)位置数据可视化
位置数据与业务结合,驱动数据应用,例如基于采集到的数据追踪产品的状态、快速定位查找并与数字孪生系统集成提供质量管控功能。基于海量数据沉淀,进行作业流程的合理规划等,以提升汽车制造与装配产线的整体作业效率以及产品质量把控能力。
首先,以UWB技术为核心,全方位整合车辆位置数据、车辆生产时长、车辆检测轨迹等数据信息,可以快速查找每个工序的车辆信息并对其移动轨迹进行跟踪,实现从装配线、静检线到最终交付营销的全过程精细化管理,让车间管理可视,让结果可追踪。例如返修车位置快速查找,在实时地图上可以快速找到特定车辆的位置信息;整车返工区运行监控,基于车辆位置信息,车辆维修状态信息等多维度数据,实现返工区车辆状态信息的实时监控。UWB定位技术与RFID、GIS以及视频监控等技术手段融合应用,通过3D的形式仿真工厂和流水线,实现流程可视化并与数字孪生/MES/ERP等系统整合,对汽车制造与装配作业全流程中的人、重要物资、工器具等动态位置信息进行实时精确定位。其次,在生产推进过程中,车辆需要经过多到产线工序完成车辆的组装,我们可以监测车辆进入每道工序的时间、停留时间、离开时间和轨迹线,高效、精准、无人为干预的统计在产车辆数量以及在线上/线下的生产进度、节拍达成情况等,为工厂MES系统提供数据支撑,提高对生产过程产线效率的优化。最后,车辆组装完成后会进入检测阶段如精检、动检、路试、喷淋、返修等,为确保车辆是按照正常检测顺序进行,我们在检测关键路线上设置电子围栏,根据系统预设的检测工序和车辆当前检测进度判断车辆应该进入的工序,以及是否按照正常工序进行,如有异常将发出告警。另外还可以通过设置超时滞留,实现各车辆在各工序滞留时长分析,通过滞留车辆图标变红/闪烁实现自动报警,从而提升预警处理能力。
2)移动定位操作控制
现代制造业生产设备繁多,生产车间工人的安全操作要求严格,活动空间受限。在汽车生产工程中如何实现各个阶段的预调试、安全管理、设备维护是现代汽车制造业面临的难题。基于UWB超宽带定位技术的基础上,通过接收基站下发信号,并通过TDOA算法计算空间坐标,结合Profinet/Ethernet无线技术,将当前位置信息上传到PLC系统,同时,PLC根据当前位置信息,调整自身逻辑状态,实现对周围设备的控制技术。在建立的数字3D场景中,将人物与实际场景中的位置进行关联,实现现实场景与虚拟场景的映射关系,人物当前位置即实际场景中的位置。如图4所示二维定位环境下,将现实人物的运动数据通过解算,运行在虚拟场景中的角色画面中,通过UWB定位识别人员位置对比数字地图,激活周边设备的操作权限,改变了过去需要人去现场识别设备后进行选择的操作方式。人员可以灵活自由的靠近设备进行操作和观察,不再有盲区。
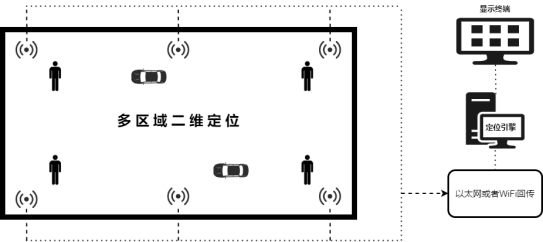
图4 车间二维空间UWB定位应用方案
5.基于UWB定位的数字孪生系统应用展望
随着5G、物联网、UWB、数字孪生技术近年来集中爆发,传统汽车制造业迎来了数字化转型的新契机,同时得益于新能源汽车的高速发展,使得三维数字技术有机会在更广泛的行业领域落地生根。数字孪生因感知控制技术而起,因综合技术集成创新而兴。信息化是数字化的基础,数字化是智能化的基础。它都是以一个数字孪生体为前提,数字孪生体来聚合这些信息,才能去做智能化。通过将实时位置大数据融入数字孪生系统平台,实时定位产生的位置首先能直观地显示各类元素的位置,方便管理者对各类生产要素的监督,同时通过位置信息形成各类软件应用方面的功能进一步提升了管理和监督的便捷性、实时性和智能化,而基于长时间、大量位置数据形成的人员热图、位置、轨迹能作为工序效率提升和供应链路径优化的基础信息数据,为汽车制造与装配企业带来突破性的信息化变革。
6.结语
随着汽车制造进行智能化、无人化工厂转变,在车间柔性生产过程中对人员、设备、仓储等方面的管理提出了越来越多的复杂需求,本文结合实践探讨了在企业在数字化转型过程中依托三维数字孪生技术结合高精度定位系统对汽车制造车间流水线精益生产管理优化的新方向,提供了新的思路。笔者希望通过将数字孪生和UWB定位技术融合到企业的信息管理系统中,为数字智造工厂的管理和效率带来更大的价值。
参考文献
[1]李丽娜,尤洪祥,张晓东,等.机器人UWB定位系统的设计与实现[J].辽宁大学学报:自然科学版,2018,45(1):5.
[2]李威,叶焱,谢晋雄,等.UWB高精度室内定位系统及实现[J].数据通信,2018(5):6.
[3]许奔月. 用于三维定位的UWB及其关键技术研究[D]. 上海:东华大学,2007. DOI:10.7666/d.y1441398.
[4]唐春玲.UWB定位系统研究[D].重庆:西南大学,2008.
[5]陶飞, 张萌, 程江峰,等. 数字孪生车间——一种未来车间运行新模式[J]. 计算机集成制造系统, 2017, 23(1):9.
[6]陶飞, 程颖, 程江峰,等. 数字孪生车间信息物理融合理论与技术[J]. 计算机集成制造系统, 2017, 23(8):9.
[7]姜浩, 范志鹏. 数字孪生在智慧工厂中的应用探讨及案例分析[J]. 现代信息科技, 2022, 6(12):5.
[8]丁锐,钱志鸿,王雪,等.基于TOA和DOA联合估计的UWB定位方法[J].电子与信息学报,2010,32(2):313-317.
[9]仰胜,胡志刚,赵齐乐,等.基于TOF模式的UWB定位原理与精度验证[J].大地测量与地球动力学,2020,40(3):247-251.
[10] 周刚.基于UWB定位的变电站作业安全监控技术研究[J].中国安全生产科学技术,2016,12(8):5.
[11] 孙瑜,范平志.射频识别技术及其在室内定位中的应用[J].计算机应用,2005,25(5):4.
[12] 赵军,李鸿斌,王智.无线网络室内定位系统研究[J].信息与控制,2008,37(4):7.
作者简介:侯亚奇(1990.8--),男,河南许昌人,华北电力大学硕士未毕业——硕士研究生,研究方向:虚拟仿真、数字孪生、VR/AR、工业物联网,AI人工智能。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



