深圳市宝鹰建设集团 广东省深圳市 518041
摘要:近年来,随着BIM技术、三维激光扫描技术、BIM放样机器人现场放样技术在国内许多项目上的实施与落地,我国的建筑信息化技术向前迈进了一个新台阶,为解决企业在施工中的各项难题,发挥了巨大的作用。然而,BIM的实际应用中,建筑工地现场实时数据与建筑信息模型间的互通更新往往是个难点,存在着模型与现场不一致、细部数据勘测难、精度低等问题,而三维激光扫描技术与测量放样机器人的出现,则为解决这些难点提供了高效、安全、可行的方法,在建筑装饰专业中也同样发挥了巨大价值。本文以BIM技术在南宁香格里拉酒店的装饰工程中的应用为例做总结。
关键词:BIM;三维激光扫描;BIM放样机器人;高档酒店装饰
1 关于BIM技术,三维激光扫描,BIM放线机器人
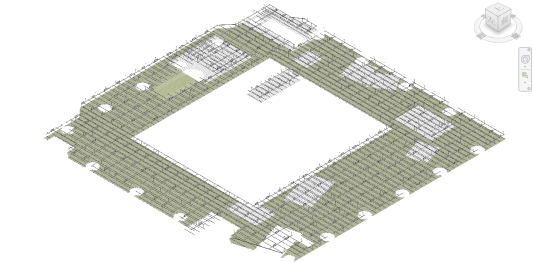
1.1 建筑信息模型BIM(BuildingInformation Modeling)是以建筑工程项目的各项相关信息数据作为模型的基础,进行建筑模型的建立,通过数字信息仿真模拟建筑物所具有的真实信息,包括三维几何形状信息,如建筑构件的材料、性能、价格、重量、位置、进度等,使建筑工程在其整个进程中显著提高效率、大量减少风险,以支持项目生命周期建设、运营管理。它具有可视化、协调性、模拟性、优化性和可出图性五大特点。

图一 BIM模型
1.2 三维激光扫描技术:传统的测量概念里,所测的数据最终输出的都是二维结果(如CAD出图),使用的测量仪器里,全站仪,GPS比重居多,但测量的数据仍是二维形式的。在逐步数字化的如今,三维激光扫描技术因其高效直观,开始逐渐的代替二维测量仪器。其利用高速激光扫描测量的方法,大面积、高分辨率、快速地获取物体表面各个点的(x.y.z)坐标、反射率、(R.G.B)颜色等数据信息,这样高速的测量方式,是一般测量手段无法做到的。其输出成果为点云数据,这些大量、密集的点信息可快速复建出1:1 的真彩色点云三维模型,可导入到Revit、AutoCAD、Rhino、Navisworks、ArchiCAD等BIM软件;可以实现智能量测——轻松获取平距、斜距、垂距、净空、直径、角度、方位角、坡度、倾斜角和坐标等一系列数据;还可根据点云数据准确的修改复核BIM模型。

图二 三维激光扫描仪

图三 点云模型
1.3 BIM放线机器人:BIM放样机器人是直接使用BIM模型结合高精度的自动测量仪器在施工现场同时进行多专业三维空间放线的技术。BIM放样机器人硬件包括:放样主机,外业平板电脑,三脚架,全反射棱镜及棱镜杆等。软件包括:Trimble Field Link软件和基于Revit及CAD的测量及放样点位插件。
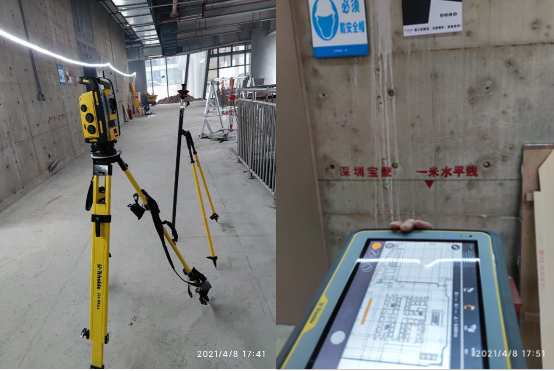
图三 放线机器人
2 项目概况
南宁华润中心东写字楼工程位于东盟商务区核心位置,工程用地面积约5830 m2,总建筑面积约27万m2,地上86层,地下3层,建筑高度403 m。其中1-5层以及68-71层为酒店公区。酒店总面积约为5.15万平方米。其中公区及餐厅区施工面积约为9000平方米。精装项目施工范围为5F,68F,69F。
3 BIM实施思路
该项目为五星级酒店,业主对精装效果要求高,工期紧,大堂天花造型复杂,故项目团队确定了土建交付后使用三维激光扫描仪进行现场复核,用扫描出来的点云模型与土建BIM模型进行比对,矫正土建BIM模型;再在与现场一致的土建BIM模型基础上进行机电,精装深化和技术交底,施工中用BIM放样机器人辅助进行精准定位的基本思路。

图四 BIM实施流程
4.现场土建条件的复核
由于现场个别定位靶点已经损坏,故使用测量仪器进行重新观测,重建了坐标系统。然后对现场各楼层分别进行多站点的三维激光扫描,整合生成各楼层相应的点云模型。在上一步基础完成情况下,把已有设计阶段的建筑结构BIM模型与点去模型进行整合,进行分析校对,修正BIM模型的空间位置与尺寸。

图五 模型与现场点云比对1

图六 模型与现场点云比对2
5.BIM模型的深化
5.1 精装模型搭建
建筑结构BIM模型校对后,开始进行精装地面、墙柱、天花龙骨等的BIM模型搭建,并按最新施工图纸进行模型更新。

图七 地面与墙柱模型
图八 天花龙骨模型
5.2 模型整合与专业间碰撞检测
整合建筑结构、机电等模型,对精装模型进行碰撞检测,过程中及时记录各类碰撞问题,汇成问题报告。

图九 天花模型与机电模型整合分析

图十 碰撞检查报告
5.3 面板排版分缝
对地面、墙面及天花的面板,在模型上进行分缝深化处理,作为施工现场的排版依据。

图十一 面板排版分缝
6.放样机器人放线
6.1 BIM放线前提条件
6.1.1必须提供可施工的BIM模型或CAD图纸,校核的模型或cad图,与现场尺寸一致;
6.1.2施工作业的可视范围内有测量控制网,至少要同时看见3个以上的控制点(标靶点),且必须BIM模型或cad图纸上能找出与之对应的点;
6.1.3 BIM模型(或CAD图纸)与施工现场的坐标系必须统一,需匹配坐标系。
6.2 BIM放线流程

6.2.1精装模型建立完成后,需将通过天宝模型取点软件在模型上确定需放样的点。天宝Trimble Field Points软件支持,CAD,Revit, SketchUp三个平台的安装。安装完成后,软件的工具栏会出现相应的菜单。
图十二 取点软件菜单
6.2.2 准备好校核完毕的可施工BIM模型

图十三 可施工的BIM模型
6.2.3 机器人定位点的取定
在施工放样BIM模型上取点。首先需选择现场已标定的可通视的三个标靶控制点,用于放线机器人自身的准确定位。只有在放线机器人自身定位准确无误的情况下,放样结果精度才能保证。

图十四 机器人定位点的取定
6.2.4放样点的取定。
首先检测模型比例是否是1:1,现场的控制点是否已在模型上面有标识出来,模型坐标系与施工坐标系是否统一。如果比例不对,需将模型缩放至1:1,坐标若有问题,请联系测量人员进行坐标匹配,模型确认无误后进行取点工作。取点工作完成后需要导出CSV数据,注意:导出的文件夹及CSV文件都不能包含中文,否则可能无法导出。

图十五 放样点取定
6.2.5将导出的CSV文件拷贝至外业平板电脑中,准备外业作业。在控制平板电脑插入带有数据的U盘,将数据拷贝至Trimble field link 默认任务路径jobs文件夹中,为了方便数据拷贝,在桌面创建jobs文件夹快捷方式。打开trimble field link ,点击界面上的“更多>任务>管理>jobs>拷入的数据文件夹>选择数据文件>打开”。打开数据后可以看到,导入了之前在模型中创建的控制点、放样点和BIM模型。

图十六 导入放样数据
6.2.6现场放样机器人主机设站。
上述准备工作完成后,即可在现场进行放样作业。首先需将主机进行设站。主机提供了“后方交会法”和“后视法”两种设站方法,本项目使用的是 “后方交会法”。只要在视野中至少有两个已知位置的控制点,RTS放样机器人就能知道自己的位置,控制点之间的角度在45°到135°最合适。 角度的要求有助于更加精确的计算仪器的位置。控制点在45度和135度之间,或者有更高的精度要求,可以测量3个或者更多的控制点提高精度,最多可测量5个已知控制点。

图十七 主机设站
6.2.7现场放样。
主机设站完毕后,即可进行现场放样点的放样。在Trimble field link软件的测量模块下选择放样菜单,打开BIM模型,选择DR模式(激光模式),在屏幕上点击需要放样的点,RTS771放样机器人将自动瞄准该点,红色激光点的位置及为该点位,做好标记即可。

图十八 现场放样
7.结束语
随着新技术新方法的不断发展,建筑信息化改革已进入深水区,BIM技术、VR技术、AR技术、三维激光扫描技术、放线机器人技术等高新技术手段已在建筑施工种不断普及,原来看似高大上的技术也已飞入寻常百姓家,相信随着这些技术在越来越多的工程项目中的使用,一定能是建筑这个传统的行业焕发新的生机,迎来新的飞跃。
![]()
参考文献
[1]郑鹏程《BIM在建筑设计中的应用探讨》【J】.建筑工程技术与设计,2017-07-10.
[2]杨文娟.BIM技术在建设项目全过程应用价值分析【J】.中国建材科技,2019,28(06):109-110
[3]杨文娟,陈可祥.BIM建模基础.[M]重庆:重庆大学出版社,2020:110-148

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



