国网重庆市电力公司超高压分公司 重庆市高新区 400000
摘要:随着城市的扩容对电力需求几何级的增大,要求电网呈上升趋势的大规模发展,使高压及特高压输电线路空中走廊越来越密集,特别是特高压输电线路长期暴露在自然环境中,除了承受雷击、风害、洪水、滑坡、沉陷、地震和鸟害等不可预测外界因素的危害以外,该应对挖掘机、起重机、水泥罐车、装载机、塔吊和吊车等机械外破类隐患进行有效管控,本文将通过杆塔前端千里眼,实时动态监控走廊状态,基于激光雷达和视觉图像在环境感知任务中的应用,基于障碍物的激光点云与图像的后校准融合算法,获得映射准确的彩色点云,同时基于障碍物的激光点云与图像融合的距离测量算法,计算障碍物距离高压输电线路距离信息,提高测距准确率,达到消除隐患的目的,实现智能化巡视的效率性,确保特高压输电线路的运行安全。
关键词:超特高压输电线路;激光雷达;视觉图像;融合算法;测距算法
引言:为持续推进西电东送战略,近年来超特高压线路迅速扩增,但新建和已有的超特高压线路地理环境复杂,同时经济的快速发展导致沿线施工频次较高,施工过程中机械外破类隐患明显增加,严重危及线路安全运行。为筑牢电网安全防线,已建立可视化网络管理平台,可实现线路通道内的外力破坏、山火烟雾等通道隐患的实时检测和告警,但当前仅能定型识别如挖掘机、起重机、水泥罐车、装载机、塔吊和吊车等机械外破类隐患,并且无法感知机械外破类隐患的位置和尺寸信息。为了进一步加强机械外破类隐患的有效管控,需实时测量机械外破隐患相对导线的净空距离,本文提出可充分发挥可视化图像数据目标检测和三维激光点云距离精准测量的优势,通过激光点云与图像进行后校准融合算法以及距离测量算法,对超特高压输电线路存在的机械外破隐患进行智能识别及测距,提高输电全景智慧监控平台的技防能力,提升线路外破管控效率,杜绝机械外破导致的线路跳闸事故发生。
一、基于AI建立的巡视网络管理平台
为了加强通道外破管控,对超特高压线路逐塔安装图像抓拍装置,利用图像视频技术、广域通信技术和信息处理技术实现输电线路运行状态的实时监测、预警和分析诊断,当前已实现动态实时监控现场,后端管理人员通过巡视网络管理平台及时了解监测点的现场信息,针对突发的异常情况采取适当的手段予以人工干预,将事故的发生率或事故危害降至最低;在无人值守时可采用定时和条件触发两种方式,实现异常状况下的图片抓拍或视频连续摄像,达到24小时全天候监测的目的,减轻巡视人员的工作量,但是该平台依然存在无法感知机械外破类隐患的位置、尺寸信息、净空距离以及柔性外破隐患识别问题。
为了解决上述隐患,采用人工24小时不间断巡逻的方式显而易见在执行层面不具备可行性,因此在信息技术不断发展的情况下,通过应用计算机AI能力,对相关隐患目标进行智能识别及测距成为解决外破隐患24小时监控的有效技术手段,本平台结合传统目标检测算法和YOLOV3深度学习算法已实现对机械外破、山火烟雾共计18类通道隐患识别,2022年已成功检测出机械外破2200余次、山火500余次、烟雾200余次,其中机械外破隐患检测情况如下图1所示。

图1为洪板线#217测试点测试平台机械外破的识别照片
二、基于二维图像数据和三维激光数据融合的外破机械测距
1、基于三维激光物体测距理论简介
激光雷达是利用感光元件发送和接收激光束的时间差或者相位差计算障碍物距离;激光雷达发射激光束,激光束遇到障碍物表面被反射回来;激光束以光速传播,接收器接收到反射的激光束后,根据其被返回的时间就可以计算出障碍物的相对距离,根据激光束的发射角度,可以计算出障碍物的各个方向的相对距离,即障碍物在激光坐标系的坐标![]() ;激光雷达检测距离的技术成熟、测量结果准确,但是其障碍物识别难度大,使激光测距在输电线路测距方面的应用存在明显的局限性,因此激光测距与相机结合使用是解决激光测距在输电线路测距方面应用局限性的最佳选择。
;激光雷达检测距离的技术成熟、测量结果准确,但是其障碍物识别难度大,使激光测距在输电线路测距方面的应用存在明显的局限性,因此激光测距与相机结合使用是解决激光测距在输电线路测距方面应用局限性的最佳选择。
2、基于二维可视化图像数据和三维激光点云数据融合的外破机械测距算法
在现有的激光点云与图像融合方法中,大多数算法是使用激光雷达扫描棋盘图,并使用相机拍摄相应的图像,根据对应的激光点与图像像素建立联系,这些算法对人工选择对应的激光点与图像像素依赖程度高。为了降低数据融合的复杂性,本文采用后校准融合方法,专注于在没有棋盘图的条件下,融合激光点与图像,首先基于小孔成像模型和激光雷达和相机之间的位置关系,估算出投影矩阵;然后选取具有较长垂直边缘的物体为参考,计算调整投影矩阵,在传感器位置发生改变时,后校准融合通过测量新的位置关系并执行后校准来调整偏移量,可以灵活地适应新的传感器布局。
2.1基于参考对象的激光点云与图像的后校准融合算法
算法先基于小孔成像模型以及激光雷达和相机之间的位置关系生成理想的投影矩阵;根据激光点云容易检测到边缘的特性,利用具有较长垂直边缘的参考对象来校正投影矩阵;使用点云边缘的激光点和图像垂直边缘的像素计算水平坐标偏移,将偏移量添加到投影矩阵得到校正的矩阵,获得映射准确的彩色点云;算法降低了激光点云与图像融合的复杂度;对多帧的彩色点云进行融合,得到三维彩色地图。
1)小孔成像建模详解:采用融合方法是将 3D 空间中的点映射到二维图像中对应的像素,确定空间点与图像像素的对应关系;小孔成像模型定义了 3D 空间点与其成像像素之间的关系。小孔成像模型如图![]() 是相机坐标系,其原点
是相机坐标系,其原点![]() 位于相机的焦点处,
位于相机的焦点处,![]() 是光轴,3D 点 P 在相机坐标系中的坐标为
是光轴,3D 点 P 在相机坐标系中的坐标为![]() ,u-v是成像坐标系,
,u-v是成像坐标系,![]() 是点
是点![]() 在图像平面中的成像坐标。
在图像平面中的成像坐标。

图2为小孔成像建模图
如上图所示的小孔成像模型,3D 点![]() 通过透视变换投影到 2D 图像u-v平面上,形成了实际场景的图像;根据三角相似原理,可以获得以下关系:
通过透视变换投影到 2D 图像u-v平面上,形成了实际场景的图像;根据三角相似原理,可以获得以下关系:

其中,f为相机焦距,单位为像素,长度等于![]() 到图像平面的距离,
到图像平面的距离,![]() 为图像的主点。上述公式可以表示成齐次坐标形式:
为图像的主点。上述公式可以表示成齐次坐标形式:

通过归一化,可将公式左侧参数![]() 调整为 1;
调整为 1;
公式中所使用的数据来源于 KITTI 数据集,将激光坐标系与相机坐标系建立关系模型,如图![]() 表示图像坐标系,
表示图像坐标系,![]() 表示激光点的坐标系。
表示激光点的坐标系。

假设两个坐标系的原点![]() 和
和![]() 之间的距离分量分别为
之间的距离分量分别为![]() ,
,![]() 和
和![]() 。可以得到如下关系:
。可以得到如下关系:

将上述公式改写成矩阵形式,获得激光点![]() 和图像像素
和图像像素![]() 之间的映射矩阵
之间的映射矩阵![]() :
:
2)后校准融合算法详解:在未确定激光与相机校正文件和校正矩阵的情况,利用小孔成像模型的成像过程,将空间点映射到图像上。在收集数据时,激光雷达和相机放置在固定的位置;因此两个传感器在彼此的外部坐标系中具有恒定的绝对坐标。鉴于激光雷达和相机的位置关系,本文根据小孔成像模型和刚性坐标变换将激光点映射到图像像素;首先将激光点映射到彩色像素,然后将对应像素的 RGB 值添加到激光点;通过此方法,最大限度地保留激光雷达获得的空间信息,并增强点云可视化,后校准融合算法总体流程如下图3所示:

图3为后校准融合算法的流程图
3)多帧点云融合方法:计算出不同彩云帧之间的变换关系,实现多帧彩云融合,首先对单帧点云按照正东、正北方向进行分解,使不同帧的点云坐标系保持一致性;通过惯导系统计算待融合的各帧点云坐标原点之间的转换关系,将后续彩云转换到第一帧点云坐标系中,达到多帧融合的目的,其具体流程图如下图图4所示:

图4为多帧点云融合方法的流程图
2.2基于激光点云与图像融合的距离测量算法
由于基于激光点云测距时无法直接识别目标类别,盲目的测距大大增加了工作量,因此首先使用本文提出的后校准融合算法对激光点云与图像建立映射关系,然后根据双目视觉所检测的障碍物位置和距离,对激光点云进行筛选,在点云中确定障碍物附近的激光点;最后使用聚类出的障碍物激光点计算距离信息;本算法的距离测量结果比双目立体视觉方法的测量结果误差更小,稳定性更高。
其三维测距基本原理流程如下:已知在输电全景智慧监控平台中,可视化监拍装置采集并识别的外破隐患照片为二维图像,每个隐患像素在图像中有唯一的平面坐标![]() ,对应杆塔或隐患线路,在已扫描的通道激光点云数据中,三维空间每个点都有唯一的空间坐标
,对应杆塔或隐患线路,在已扫描的通道激光点云数据中,三维空间每个点都有唯一的空间坐标![]() ,从而可通过标定二维图像隐患像素和三维点云的唯一对应关系,重新构建三维空间数据模型,进一步通过三维空间数据模型准确计算出隐患与导线的水平距离、垂直距离及净空距离等空间信息。
,从而可通过标定二维图像隐患像素和三维点云的唯一对应关系,重新构建三维空间数据模型,进一步通过三维空间数据模型准确计算出隐患与导线的水平距离、垂直距离及净空距离等空间信息。
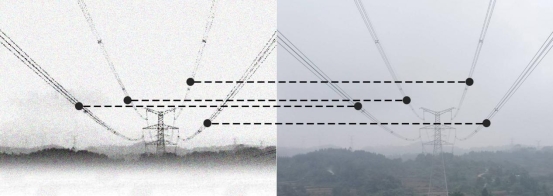
图5为应用在洪板线#217的激光点云图像和可见光图像
三、巡视网络管理平台在机械外破测距的现场调试和技术应用
1、投影图像和单目图像进行特征提取与校对
通过将相机架设在输电杆塔合适位置,相机采集线路通道场景的二维图像,将激光雷达获取的三维点云投影到二维图像,形成能够与单目图像匹配的投影图像,对投影图像和单目图像进行特征提取与校对,计算两图像之间的射影变换关系,如下图图6所示。
|
图6为激光点云图像和可见光图像的对应关系
2、计算激光雷达与摄像机之间的变换关系,生成对应配置文件
根据二维图像丰富的颜色信息进行隐患目标识别(外破隐患或大棚)提取,利用激光雷达与摄像机之间的变换关系推导出目标在三维点云中对应的点云块,输出隐患目标的空间位置信息,从而帮助用户测量目标距离和区分隐患风险等级,其变换关系流程图如下图图7所示。

图7为变换关系流程图
3、自动测距
前端相机定时或实时采集图像,对图像中的隐患目标物进行 3D 测量,输出隐患目标物与输电导线的最近距离,当检测出隐患目标与导线的距离小于安全距离时,将测量结果上报至平台端,平台端进行报警等级自动划分,启动隐患处理流程,如下图8所示为洪板线#217测距应用流程图。
 图8为洪板线#217测距应用流程图
图8为洪板线#217测距应用流程图

图9为洪板线#217测距效果图
4、机械外破测距算法总结
基于本平台在机械外破测距其距离测量结果比双目立体视觉方法的测量结果误差更小,稳定性更高,根据现有洪板线#217实际应用,距离测量结果可以达到200米范围内精确到0.5米误差,300米范围内内精确到1米内误差,特别在有遮挡的山区,基于本平台在机械外破测距优势更为明显。
四、结束语
综上所述,输电线路智能巡视系统方案依照“数据管理全景化、运行状态透明化、诊断决策智慧化及设备修复高效化”的设计思路,AI 训练平台发布初步模型到智慧线路管理平台进行模型管理,管理模型版本和生命周期,平台将配置完成的点云数据和模型数据发布至 3D 测量感知设备端,感知设备不断采集对应的隐患目标素材,并上传测量结果返回平台,平台基于二维图像数据和三维激光点云数据实现机械外破测距的优势、当前在平坦区域和山区实现的误差、再回到有效提升机械外破管控能力方面、最后提出依旧存在的问题和将来需要继续优化改进的方面。
参考文献
[1] 谌彤童. 三维激光雷达在自主车环境感知中的应用研究[D].国防科学技术大学,2011.
[2] 陆怡悦. 基于雷达与图像信息融合的路面目标识别与应用[D]. 南京理工大学, 2017.
[3] 唐春益. AdaBoost 算法及其在目标识别中的应用研究[D]. 南昌航空大学, 2012.
[4] 谢剑斌. 视觉机器学习 20 讲[M]. 清华大学出版社, 2015.
[5] 张穗华, 骆云志, 王钤,等. 基于三维激光雷达的障碍物检测方法研究[J]. 机电产品开发与创新, 2016, 29(6):14-17.
[6]周洋,祁永梅.500kV高压输电线路运维及防雷措施分析[J].山东工业技术,2018:176.
[7] 金刚. 自适应 Canny 算法研究及其在图像边缘检测中的应用[D].浙江大学,2009.
[8] 倪欢, 张继贤, 林祥国. 三维点云边缘检测和直线段提取进展与展望[J]. 测绘通报, 2016(7):1-4.
[9]刘洪.高压输电线路运维及防雷措施分析[J].建筑工程技术与设计,2018:1699.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号




