长春大学 吉林省长春市
摘要:根据有关调查显示,至2030年,我国慢性病患病率将高达65.7%,其中80%的慢性病患者需要康复治疗,这使得护理人员的负担越来越重。本研究课题通过设计出一款可折叠的医疗康复机器人从而提高护理人员的效率,降低了在护理工作中长期背抱患者移位而形成的扭伤等职业病,由于其小巧,因此可塞进汽车后备箱。设计的展现形式主要通过Solidworks软件画出零件图,并进行装配,之后进行仿真,得到具体数据,其原理是通过控制电机驱动抓手来模拟护理人员手臂将患者抱起的动作,并且可调节电动推杆来控制医疗康复机器人的高度,方便将患者移动到轮椅、床和汽车上。
关键词:移位;折叠;可调节;医疗康复
1.总体设计
操作装置的设计应以方便护理人员使用为前提,即操作界面应该简单易懂,操作装置。该操作装置各个按钮的摆放与其控制的各个伺服电机和电动推杆的位置相对应,所代表的方向为护理人员站在医疗康复机器人的后方。遥控器下方的向下剪头按钮代表控制医疗康复机器人下方的电动推杆的收缩,当电动推杆下降到最低位置后,再按向下剪头按钮,医疗康复机器人将不再有任何反应;遥控器下方的向上剪头按钮代表控制医疗康复机器人下方的电动推杆的伸出,当电动推杆上升到最高位置后,再按向上剪头按钮,医疗康复机器人将不再有任何反应;遥控器左上方左边的向左旋转样式的按钮代表控制医疗康复机器人背部伺服电机逆时针旋转,即越来越使患者趋于平躺状态;遥控器左上方右边的向右旋转样式的按钮代表控制医疗康复机器人背部伺服电机顺时针旋转,即越来越使患者趋于坐姿状态;遥控器右上方右边的向左旋转样式的按钮代表控制医疗康复机器人腿部伺服电机逆时针旋转,即越来越使患者的腿部趋于抬起状态;遥控器右上方右边的向右旋转样式的按钮代表控制医疗康复机器人腿部伺服电机顺时针旋转,即越来越使患者的腿部趋于伸直状态;遥控器右侧最上方向左旋转样式的按钮代表控制医疗康复机器人腿部伺服电机上方的伺服电机逆时针旋转,此按钮是在医疗康复机器人由使用状态向折叠状态过度时使用,减小机器人占用的空间;遥控器右侧最上方向右旋转样式的按钮代表控制医疗康复机器人腿部伺服电机上方的伺服电机顺时针旋转,此按钮是在医疗康复机器人由折叠状态向使用状态过度时使用。
2.其他零件建模
卡紧装置设计成钥匙的形状,中空的设计方便护理人员将其拔出或插进旋转装置。
电动推杆固定装置与底盘连接零件的作用相当于一个中转站,是整个产品中压力最大的地方,所以其厚度相较于其他钢板的厚度多了5mm,达到了10mm。
电动推杆固定装置用于固定电动推杆,在折叠时使其转动即可,品字形凹槽是为了配合底盘稳定装置使用,凹槽下方的圆孔使得电动推杆可以转动,正方形的中空设计是为了限制电动推杆固定装置使用时转动。
为了增加医疗康复机器人的稳定性,设计了底盘稳定装置,它在空间上呈三角形,连接底盘的两条腿,电动推杆固定装置,减小了使用时电动推杆旋转处旋转的可能性。
3.医疗康复机器人整体装配图
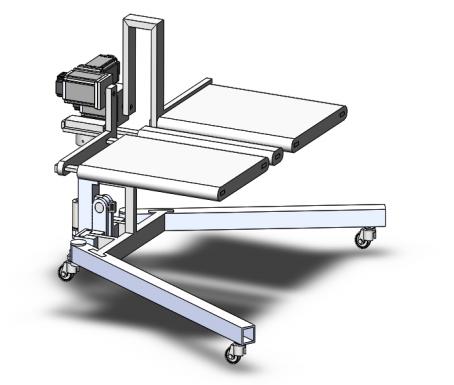
医疗康复机器人处于最低位置装配图
在高度上,见图,医疗康复机器人处于最低位置装配图,此状态医疗康复机器人能到达的最低位置,此时由电动机控制的手部抓手、腿部抓手都为0度,此状态适用于患者躺在床上时使用。使用医疗康复机器人时,先将病人翻至侧身状态,使医疗康复机器人移动至紧贴病人后背的位置,再将患者翻到背垫和腿垫上,并且屁股尽量落在中心位置的屁垫上,护理人员通过操纵装置控制右边的伺服电机转动带动背部抓手及背垫,使患者后背缓慢抬起,达到坐起的目的;再通过控制最左边的伺服电机转动带动腿部抓手及腿垫,使患者膝盖抬起,起到类似于用人的两只胳膊将另一个人抱起的作用。
患者躺在医疗康复机器人抓手上后,护理人员可通过操纵装置控制背部伺服电机顺时针转动和腿部伺服电机逆时针转动,呈抱起的姿态,再通过操纵装置控制电动推杆,使医疗康复机器人的总高度升高,医疗康复机器人处于最高位置装配图,使医疗康复机器人帮助护理人员将患者移动到轮椅的上方,或汽车座椅上。将患者移动到轮椅上后将所有的抓手抽出,再控制电动推杆上升,就可以将医疗康复机器人与轮椅分离。同理,在汽车座椅上也是这样操作。
参考文献
[1]王加成,陈云红,陈伯茂.医用车新型脚轮的研制[J].医疗卫生装备,2001(06):66.
[2]陶可瑞,朱连庆.PLC控制伺服电机应用设计[J].中国高新技术企业,2009(13):13-14.
[3]吕志炜,吕向成,钱正伟,林宗德,林新英.智能变形医疗床结构设计与研究[J].电脑编程技巧与维护,2020(06):129-130.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



