大唐国信滨海海上风力发电有限公司 江苏省盐城市 224544
摘要:多波束测深系统对于海上风电运维工作具有较强的相关性,通过使用多波束测深系统可以有效的获取风电桩基周边的三维空间信息,进而可以对风电桩基的安全情况进行评估。国产多波束测深系统在水下勘测领域尚处于起步阶段,本应用场景通过采用国产MS8200多波束测深系统在海上风电运维的实际应用,验证了国产多波束测深系统已经完全满足风电运维的实际需求,同时其测量精度也完全满足相关的行业规范要求,本应用案例对国产多波束测深系统在风电运维的应用效果情况具有重大的借鉴意义。
关键词:海上风电运维;国产多波束测深系统;桩基冲刷;水下地形勘测
引言:
随着我国海上风电的迅速发展,装机总量的不断提升,海上风电的运维工作将会成为风机运转的日常维护工作,同时,因为桩基深埋水下,受海流、回流等影响,桩基周围往往存在不同程度的冲刷损坏,严重影响海上风电的使用寿命,日常的水下冲刷监测[1],将是维护风机运转和安全的重要工作。
目前,多采用多波束进行全覆盖水深测量,进行地形描绘,通过定期的巡航测量和历史数据对比,研究并分析桩基周围水下地形的变化量和变化趋势,为风机安全提供可靠的数据保障。2012年之前,国产多波束与国外多波束存在着一定的差异,从整体上讲,当时我国在多波束测深技术的研究方面还未进入完全成熟实用阶段,与同时期国外同类产品的技术指标相比,国产设备还存在一定的差距,在波束数量、测量深度、测量精度和扫描宽度等关键技术上还较为落后,而且设备重量大、功能性较为单一。经过近十年多波束技术的积累与发展,国产多波束从提高测深范围、提升单次测量获取的水深点数量和精度以及加强数据处理软件的通用性等方面入手,改良了技术设计以及内部算法,并且在最初的薄弱环节上取得了重大的突破。目前国产多波束也实现了设备的小型化和通用化,在应用方面,国产多波束已经在水下地形探测、沉船打捞、航道淤积计算、水下障碍物应急探测中都具有广泛的应用。
本文主要以江苏省滨海某风电场为研究案例,从需求角度介绍多波束测深系统在风电运维水下勘探的应用过程,并对测量结果进行精度统计分析,验证多波束测深系统在海上风电地形测量中测量精度和测量效率,多样化的三维结果具有更直观的展示效果。
1 多波束基本原理和系统组成
1.1.基本原理
多波束测深系统的工作原理为由换能器的发射基阵向水底发射一个平行于航迹线方向上窄的,垂直于航迹线方向上宽的扇形照射声波(图1中黄色区域),同样,换能器接收基阵同样存在平行航迹线方向上宽的,垂直于航迹线方向上窄的扇形接收区域(图1中绿色区域);当声波发射后,通过对接收信号进行恰当的处理,一次探测就能测出N个水深值,再进行必要的定位、姿态、声速、潮位等各种修正后,即可得到并绘制出精准可靠水下三维地形[2]。
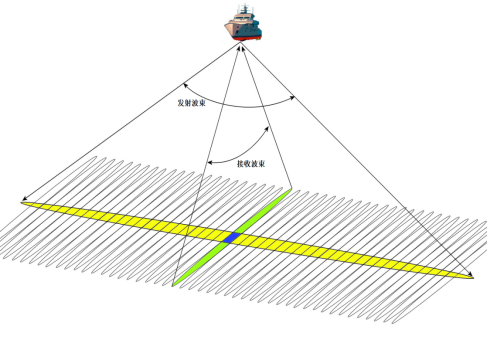
图1 多波束工作原理
1.2.海卓MS多波束测深系统组成
多波束测深系统是一种多传感器的复杂组合系统,是现代信号处理技术、高性能计算机技术、高分辨显示技术、高精度导航定位系统、数字化传感器技术及其他相关高新技术等多种技术的高度集成。
多波束测深系统主要由多波束测深仪、表面声速仪、声速剖面仪、姿态仪、GNSS定位设备、供电系统、采集计算机及控制和采集软件、后处理软件等组成。海卓MS8200多波束组成如图2所示。

图2 海卓MS8200多波束组成示意
2 工程实施实例
2.1.项目概况
2021年10月在江苏省滨海某风电场,风电场规划范围呈梯形,中位置位离海岸线36公里,风机站横向间距593米,纵向间距635米,规划海域面积150平方公里,安装46台单机容量3.3MW风力发电机组和50台单机容量3.0MW风电发电机组。图3 测区地理位置。

图3 测区地理位置
2.2.项目实施
2.2.1.多波束安装调试
1)海卓MS8200多波束测深系统的换能器安装在船侧中间部分,避免距离螺旋桨较近受到噪音和绕流干扰,同时此处距离驾驶舱较近,也方便走线,换能器安装在法兰杆上通过螺栓紧固,法兰通过支架结构与船体进行钢性固定连接,防止在测量过程出现抖动现象,而影响数据测量质量。图4 换能器安装示意。

图4 换能器安装示意
2)换能器、姿态仪、GNSS定位等设备安装完成后,通电对设备连通进行调试,并进行坐标系参数和船型位置关系设置。
2.2.2.测线规划
1)实验主要测量风机直径100米范围内海底地形,通过测量数据进行对比分析风机计算和验证冲刷和和淤积的实际情况和变化规律,为风电运维工作提供可靠的数据支撑,实验采用“井”字航测方法。采用“井”字航测的方法,目的在于通过对水下风电桩基进行不同距离、多角度地测量,可以对不同距离、不同角度测量数据进行拼合,避免水下风电桩基测量数据可能存在遗漏的状况,让测量的数据更加完整,最终出图效果也更加清晰直观。本次测量在风机四周共布置8条测线,线间距按照当前水深的4倍进行。图5 为单台风机扫侧计划线布设情况。

图5 单台风机扫侧计划线布设情况
2.2.3.声速剖面数据采集
1)声速剖面数据是影响测量精度的重要辅助数据,在每天作业的早、中、晚分别进行声速剖面数据测量,声速剖面数据采集范围控制在直径5公里范围内,且测量过程中时刻观察表面声速仪数值变化,在变化超过2m/s时进行一次声速剖面数据采集。经过连续多天的声速剖面采集采集测量,换能器位置声速变化在1538.5m/s。图6 声速剖面变化曲线。
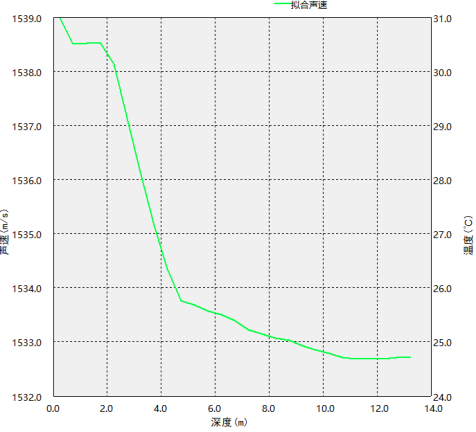
图6 声速剖面变化曲线
2.2.4.潮位数据采集
1)由于海上风电场距离岸线较远,且没有高程控制点,故此采用双潮位计观测法,即测区指定地点投放潮位计进行潮位观测并记录水深变化情况,在岸线码头布置另一台潮位计,与测区潮位计同时进行潮位观测并记录数据。待测量结束后,通过岸线码头已知控制点的潮位观测数据计算平均海平面推导测区潮位计投放点高程信息,进行换算测区潮位观测数据。
2.2.5.多波束校准测量
1)因为多波束换能器和姿态仪不能保持艏向平行和基准面水平的安装形态,换能器和姿态仪往往存在安装偏角,又因为使用了PPS技术,故此只需要通过校准测量计算横摇角(Roll)、纵摇角(Pitch)及艏摇角(Yaw),不需要进行延时校准。通过软件计算得出改正值,横摇角(Roll):-0.28°,纵摇角(Pitch):-0.4°,艏摇角(Yaw):0.65°。图7 校准计算,通过代入校准值查看数据拼合状态,确定本次校准值符合要求,可以在多波束测量和数据处理中使用。

图7 校准计算
2.2.6.多波束数据采集
1)多波束数据采集主要通过控制HydroQuest显控软件进行声呐工作参数设置和调整,使用HydroNavi导航采集软件进行计划测线航信和测量水深数据,测量过程中根据水深变化调整显控软件的门限和量程进行精准测量,在导航采集软件中监测船型动态指挥船长按照制定航线航行,并把船速控制在6节以下,保证测量数据质量。测量中时刻注意表面声速变化,严格按照作业要求进行声速剖面数据采集。图8 多波束测量。

图8 多波束测量
2.2.7.精度验证测量
根据《JTT 790-2010 多波束测深系统测量技术要求》和《IHO海道测量规范S-44》规范要求进行精度对比;精度验证的方法是在较为平坦的海底进行十字型全覆盖测量,做交叉测线数据验证,纵向测量数据作为主测区数据,使用横向测量的中央波束测量点,校验测量点数量,做统计分析。
1)风场内选取较为平坦的区域进行十字交叉符合校验测量,在200m*200m范围内进行南北和东西垂直全覆盖测量,图10为十字交叉检核测量示意图:
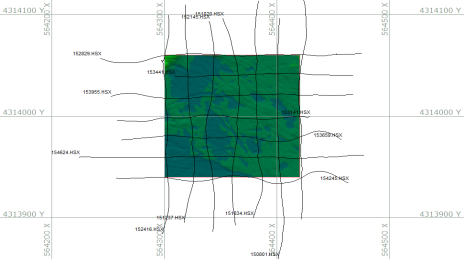
图10 十字交叉检核测量示意图
3 数据处理
多波束数据使用CARIS HIPS进行处理,首先进行船型文件创建,然后导入多波束测量数据,编辑潮位和声速文件,查看传感器数据并进行去噪处理,创建曲面,最后输出需要的结果数据,基本处理流程如下:
1)创建数据处理工程,并建立船型文件,本次使用的测量船的基本参数为:船长45.6米,船宽8.5米,吃水1.5米,船舷距离水面2.1米;
2)根据潮位计观测到的水位数据,编写规定格式的水位文件;同时,把采集的声速剖面数据也编辑成CARIS可以识别的文件;
3)加载并对多波束数据进行条带编辑,删除测量过程中产生的噪点数据;
4)导入潮位和声速剖面数据,并进行Merge(数据合并),完成一级编辑;
5)建立曲面模型,并进行校准值的计算和应用,本次校准值Roll值为-0.28°,Pitch值为-0.4°,Yaw值为0.65°;
6)对曲面模型进行断面噪点编辑,删除在一级编辑中不能删除的噪点,完成所有的去噪删除工作;
7)生成成果曲面,并对数据进行成果分析;
8)标准的CARIS HIPS多波束数据处理流程,如图11多波束数据处理流程。

图11 多波束数据处理流程
4 成果分析
1)构建三维模型,通过颜色去区分风电基础在水下的变化情况。图12 三维模型。

图12 三维模型
2)多波束较高密度的点云数据,可以通过工具软件进行直接查看,观测量取风电基础存在的冲刷情况,抛石整体分布情况以及对比海底的高差变化情况。图13 点云模型。


图13 点云模型
4.1.定量分析
(1)抛石堆的东西长25.22米,南北宽14.47米,比海底高出2.41米。图14尺寸量取。

图14尺寸量取
(2)断面图反馈抛石的变化情况。图15 断面图。

图15 断面图
(3)三维断面可以直接计算水下抛石的现存方量,也可以反应出基础的冲刷情况;通过计算,抛石总量为2866.36立方米,风机周五100米内的冲刷体量为1562.42立方米。图16三维断面。


图16三维断面
5 精度评定
1)国际海道组织所规定的的最大总垂直不确定度(Total Vertical Uncertainty, TVU)可由下式计算得到[3]:
![]()
IHO S-44 第5版的海道测量最低标准如表1所示。
表1……
测量等级 | 特级 | 1级 | 2级 |
最大TVU 95%置信度 |
|
|
|
水深d=15m时 最大TVU 95%置信度 | 0.274m | 0.536m | 1.058m |
在水深15米时,按照以上公式计算,IHO S-44 第5版海道测量允许的最大垂直不确定度分别为:特级0.274米,一级0.536米。
以精度验证测量数据的南北7条测线数据为主测线,东西7条测线数据检查线,通过对比验证得出,正负60度波束范围内(120度扇面开角),测量精度达到特级标准;正负70度波束范围内(140度扇面开角),测量精度达到1级标准。如表2所示。
表2……
波束角范围 | 标准差 | 95% 置信区间 | IHO精度等级 |
±20 | 0.05 | 0.1 | 特级 |
±25 | 0.05 | 0.11 | 特级 |
±30 | 0.05 | 0.1 | 特级 |
±35 | 0.05 | 0.1 | 特级 |
±40 | 0.05 | 0.12 | 特级 |
±45 | 0.05 | 0.14 | 特级 |
±50 | 0.06 | 0.17 | 特级 |
±55 | 0.08 | 0.2 | 特级 |
±60 | 0.09 | 0.26 | 特级 |
±65 | 0.12 | 0.33 | 一级 |
±70 | 0.21 | 0.53 | 一级 |
6 结论
本文主要通过使用海卓MS8200多波束测深系统进行海上风电运维中的实验研究,主要论述了多波束测深系统的测深原理和实施方法,并对测量精度和成果进行了详细分析,验证了海卓MS8200多波束测深系统的测量数据在本次实验中的测量数据是合格且满足工程测量需求的。
随着多波束声呐技术的发展提升,多波束测深设备的体积越来越小,性能越来越高,操作越来越简便,在降低使用门槛的同时,也越来越多的应用在水域环境的勘探测量中。
近年来,我国风电装机总量的不断提升,后期的运维工作会更加的细化和专业化,使用多波束测深系统进行冲刷淤积和管线路由的运维检测,探寻更多的应用方法是我们的接下来重点研究方向。
参考文献
[1]祁一鸣,陆培东,曾成杰,等. 海上风电桩基局部冲刷试验研究[J]水利水运工程学报,2015( 6) : 60 - 67.
[2]丁继胜,周兴华,刘忠臣,张卫红. 多波束测深声纳系统的工作原理[J]. 海洋测绘,1999(03):15-22.
[3]GB12327-1998 海道测量规范[M] 北京:中国标准出版社1999.
![]()

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2025 期刊网(www.qikanchina.com) 琼ICP备2021005105号