(民航云南空管分局,昆明 650200)
摘要:DVOR/DME是现代民航飞行中的一种陆基导航方式,主要为飞行器提供方位和距离信息,其精度高、稳定性好,仍是现代飞行中的一种重要设备。由于在用设备数量较大,随信息技术、社会的发展,对设备运行质量的监控,已由本地发展至远端。本文以澳大利亚INDRA公司生产的VRB-52D DVOR/LDB-102 DME为例,对因远程维护监控系统中的导航维护处理器故障,导致本地或远程无法实现监控的故障进行了分析和处理。
关键词:INDRA;DVOR;DME;导航维护处理器;
0 引言
随民航空管事业的发展,为进一步提高人员利用效率,落实“大岗位,大值班”的要求。现民航空管台站的运行模式,已逐步开始由有人值守向无人值守转变。运行模式的变化随即传导至设备端,台站设备运行情况的监视,逐步由本地转移至远端,对远程维护监控系统的依赖逐步增加,系统运行的正常与否,对一线运行单位实时掌握设备状态,制定维护维修计划重要性凸显。本文以导航台安装的Indra VRB-52D DVOR/LDB-102 DME设备为例,对其远程维护监控系统进行了分析,并结合实际工作对因导航维护处理器故障导致的监控中断进行了处理。
1 故障现象
远程监控终端上出现告警现象。使用远程监控终端软件手动连接台站设备显示超时,无法获取设备运行实时数据,且无法主动推送设备告警信息至远程监控端。
2 故障分析
由于远程监控终端无法连接至台站设备,显示超时。根据设备维护经验,一般可快速初步确认为远程维护监控系统故障导致无法远程获取设备运行信息。导致此问题一般由两种原因造成,其一为通信链路中断,其二为设备端监控硬件故障。所以,故障的排查一般针对以上两种开展。
2.1 远程维护监控系统
Indra VRB-52D DVOR/LDB-102 DME设备远程监控系统主要由:导航维护处理器(NMP)、中央监控终端(CMT)、本地监控终端(LMT)和通信子系统等组成。中央监控终端和本地监控终端为装有监控软件的标准计算机,故障率较低。故障高发的地方一般位于对导航维护处理器和通信子系统。故障的排查,需对系统原理和组成有深刻的理解,这样才能综合故障情况和系统运行情况有条理的做出判断。下文对以上两部分进行分析。
2.1.1航维护处理器(NMP)
VRB-52D DVOR和LDB-102 DME导航设备的机架为导航维护处理器预留了一个专用位置。导航维护处理器可安装于DVOR或DME任一机架上,组件插入机槽后会自动连接电源和通信线路。
导航维护处理器是一个基于微处理器的模块,主要由带有程序的只读存储器(ROM)、电可擦除只读存储器(EEPROM)、电池供电的随机存取存储器(RAM)、实时时钟和四个串行端口组成。三个存储器主要用于存储运行程序、设备配置数据、设备运行数据等。作为设备维护人员,从系统组成角度分析,需要重点掌握四个串行端口的组成和作用,这样可以高效判断故障原因和制定排查策略。在四个串行端口中,其中的两个串行端口专用于与导航设备通信(DVOR和DME),导航维护处理器定期从导航设备现场的导航设备和监视器收集运行和维护数据,并将这些数据保存在RAM中。第三个串行端口专用于与中央监控终端通信,其作用有三,一是将从中央监控终端下载的站点和设备配置数据存储在导航维护处理器的EEPROM中。二是响应中央监控终端的请求,将导航维护处理器中保存的数据通过此串口传输给中央监控终端,以添加到中央监控终端的历史数据库中。三是将设备告警信息,实时从设备端推送至中央监控终端,达到告警目的。第四个串行端口专用于本地监控终端,本地监控终端在运行上与中央监控终端基本相同,这里不再赘述。实时时钟用于对从导航设备接收的或组件内生成的所有信息进行时间标记,以便准确将这些的信息将发送至中央监控终端。
在导航维护处理器板上,四个与外部进行通信的串行端口位于XN1和XN3两个接头上。图1-1所示为导航维护处理器安装于DME设备上时,四个串口的连接示意图。其上的XN1口依据不同针脚被分成三组,也就是三个串行端口。第一组通使用RS-422串口标准直接连接至DME的CTU(控制和测试单元),用于获取DME设备的运行数据,DME设备的告警信息也通过此口传输至导航维护处理器,而后发送至远程监控中断和本地监控终端。第二组使用RS-422串口标准通过DME外部I/O板、DVOR外部I/O板与DVOR的CTU连接,用于获取DVOR设备的运行数据和告警信息。第三组使用RS-232串口标准通过DME外部I/O板连接至台站端调制解调器,通过传输网络至远程监控端的调制解调器,最终与远程监控终端连接,实现远程监控功能。而XN3口使用RS-232串口标准连接本地监控终端,用于本地监控。
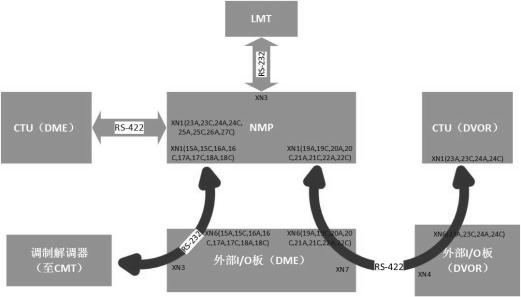
图1-1 导航维护处理器连接图
2.1.2通信子系统
通信子系统主要用于连接导航设备站点和中央监控终端。其两端安装有调制解调器,调制解调器可工作于专线或自动拨号模式,具体取决于连接站点的通信方式。当中央监控终端需要连接多个导航设备站点时,可以使用串行线路交换机将这些线路连接到中央监控终端上。调制解调器上有LED指示灯,对供电、通信链路的通断进行了指示。
2.1.3 串口电路分析
在导航维护处理器电路板内,用于串口数据接收和发送的芯片为:两个SCC2692型串口收发器,分别标注为D14和D15,其提供上文所述的四个串行端口。D14用于与本地DVOR和DME通信,使用RS422标准,其输入串口信号连接到CMOS四线三态差分接收器芯片DS26C32C(标注为N3),其输出连接到四路差分驱动器芯片DS26C31C(标注为N4)。D15用于与LMT和CMT通信,使用RS232标准,后接电平转换芯片MAX237(标注为N6)和14C89(标注为N5),其中MAX237主要用于发射,而14C89主要用于接收。
3 处理方法
根据上文对远程维护处理系统的结构和电路的分析,基本可以明确故障的排查方法。首先,CMT上连接其他导航站点,可以正常获取设备运行信息,说明CMT端设备正常。而后,查看调制解调器上的LED指示灯或使用其他方式(如:电话、网络等)对故障导航站点通信链路进行测试,可判断通信链路正常与否。如果以上测试都正常,一般就是导航维护处理器故障导致远程监控失效。
针对导航维护处理器的排查,可遵循以下原则:先本地后远端。具体为:使用LMT连接导航维护处理器运行情况进行测试,如果LMT端可正常连接设备获取运行数据,说明导航维护处理器板主要功能运行正常。故障则发生在与CMT相连的串口部分电路上。根据上文对串口电路的分析,主要涉及串口收发器D15和电平转换芯片N6、N5。针对以上三个芯片故障与否的辨别,可使用万用表在线和离线的方式与正常板件或芯片进行对比测量进行判断,也可采取正常的芯片对以上三个芯片逐一进行更换,并进行上机测试,这种方式较为简便、快捷,条件允许时,应优先采用。
根据实际维护维修经验,以上三个芯片中N6故障率较高,可优先对N6进行甄别或更换。本次故障就是由于N6芯片故障导致,在更换此芯片后,远程连接恢复正常。
4 结束语
针对任何电子系统的系统性故障排查,都需建立在系统原理和组成的深度了解上。故障点的确认需要在整体认知基础上,结合具体的故障情况加以分析,找出最易引发此问题的功能模块。对于故障点的排除,应采取便捷且快速的方式,以达到在最短时间内恢复设备的正常运行为目的,所以采取“替换法”是最好选择。
参考文献:
[1]郑连兴,倪育德.多普勒全向信标DVOR VRB-51D[M] 中国民航出版社,1996(10)
[2]倪育德,杜文一.DME LDB-101测距仪[M].中国民航出版社,1999(10)
作者简介:袁昆(1985——),云南昆明,本科,研究方向:民航导航设备维护维修

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



