浙江铂悦工业自动化有限公司 浙江省宁波市315000
摘要:现如今,部分厂家为了提高纸箱在转运的过程中的稳定性,已经开始采用机械手来夹持纸箱,并对纸箱进行转运。在机械手夹持纸箱时,主要是通过两个夹持板来夹持固定纸箱,机械手使用时,其夹持的稳定性不高,而且,纸箱的表面受到的夹紧力也不均匀,容易造成纸箱的表面损伤。因此,现对这种机器手进行创新改进,进一步促进夹持的稳定性。
关键词:码垛;机器人;稳定性;夹手结构;
前言
机器人码垛是一种自动化装卸技术,广泛应用于物流和制造业领域。夹手结构作为机器人码垛系统的重要组成部分,扮演着关键的角色。夹手结构是一种特殊设计的装置,用于机器人在码垛过程中抓取、移动和放置物体。夹手结构的主要作用是实现物体的稳定抓取和精确放置。它通常由夹爪、传感器、执行器和控制系统等组成。夹爪是夹手结构的核心部件,可以根据需要选择不同形状、材料和机械原理的夹爪。传感器用于检测物体的位置、形状和重量等信息,以便控制系统作出相应的动作。执行器负责夹手的开合和旋转等动作。控制系统则负责协调夹手的运动和与机器人其他部件的配合。
而夹手结构的重要性不言而喻。它直接影响到机器人码垛系统的效率和准确性。一个优秀的夹手结构可以实现高速抓取和精确放置,提高物体处理的速度和质量。它还能适应不同形状、尺寸和材料的物体,增强机器人的适应性和灵活性。
然而,目前夹手结构在某些方面仍存在一些研究缺陷。首先,夹手结构的设计和优化需要考虑到不同物体的特性和要求,这需要更深入的研究和实践。其次,夹手结构在面对复杂环境和不确定性因素时,如何保证稳定的抓取和放置仍然是一个挑战。此外,夹手结构的耐久性和可靠性也需要进一步改进,以满足长时间、高强度的工作需求。
1.国内外发展现状分析
在国内,许多研究机构和高校积极投入到这一领域的研究中,取得了一系列显著的成果。首先,国内研究者对夹手结构的设计进行了深入研究。他们关注于夹爪的形状、材料和机构设计等方面,以提高抓取物体的稳定性和可靠性。一些研究者采用了柔性爪子、可调节夹爪或自适应夹爪等创新设计,以适应不同形状和尺寸的工件,提高夹手结构的适应性和灵活性。其次,国内学者相对来说还比较注重夹手结构的控制算法研究。他们提出了各种运动控制策略和算法,以确保夹手在抓取、移动和放置过程中的准确性和稳定性。例如,一些研究者采用视觉传感器和力传感器相结合的方法,实现对目标物体的精确感知和力反馈控制,从而提高夹手结构的抓取精度和操作稳定性。此外,国内研究者还关注夹手结构与机器人系统的集成问题。他们研究了夹手结构与机器人控制系统之间的协同工作、通信和数据交互等关键技术,以实现整个码垛系统的高效运行和优化控制。
而在国外,夹手结构的研究也取得了重要进展。许多国际知名大学和研究机构致力于夹手结构的改进和创新。他们通过引入先进的材料科学、机械工程和机器人学等领域的知识,推动了夹手结构的性能提升和应用拓展。
2.夹手结构的缺陷对于机器人码垛工作效率的影响
夹手结构在机器人码垛系统中扮演着至关重要的角色,然而,它的研究缺陷对系统的效率和准确性产生了显著影响。这些缺陷涉及设计、性能和适应性等方面,直接影响到夹手结构在抓取、移动和放置物体过程中的稳定性和精确性。
首先,设计缺陷对效率和准确性产生不利影响。夹手结构的设计需要考虑物体的形状、尺寸和材料等特征,然而,不合理的设计可能导致抓取不牢固、滑落或误抓等问题。这意味着机器人需要进行多次尝试,延长了操作时间,降低了系统的整体效率。其次,性能缺陷对准确性造成挑战。夹手结构的运动控制精确性和稳定性对于精确放置物体至关重要。然而,存在摆动、偏差或其他运动误差的问题,可能导致物体位置和姿态的不准确。这对码垛的精度和一致性构成了威胁,可能导致不稳定地堆叠、物体损坏或错误的堆叠顺序。
此外,如果夹手结构的适应性不足,也会直接影响其效率和准确性。夹手结构需要适应不同形状、尺寸和材料的工件,但如果缺乏灵活性,就需要频繁更换夹爪或手动调整,增加了系统的维护成本和操作人员的工作量。这限制了机器人码垛系统的应用范围和灵活性。
3. 装置结构设计及其效果分析
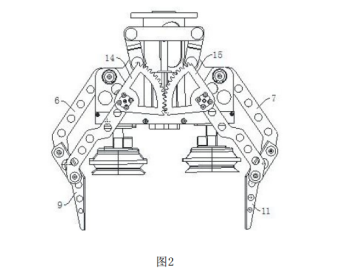
如图1、图2所示,这种特殊的用于机器人码垛的夹手,它的结构包括安装架,设置在安装架上的气缸,与气缸杆连接的联动板,分别与联动板两端铰接的第一摇臂和第二摇臂,与第一摇臂铰接的第一连接臂,与第二摇臂铰接的第二连接臂,第一连接臂的端部连接第一连杆,第一连杆上固定安装第一夹持板,第二连接臂的端部连接第二连杆,第二连杆上固定安装第二夹持板。此外,在结构设计上,安装架的一侧设有第一安装座和第二安装座,第一安装座上铰接第一导向板,第二安装座上铰接第二导向板,第一导向板和第二导向板的周面设有齿牙,第一导向板和第二导向板周面的齿牙相互啮合。第一导向板通过第一连接板连接第一连杆,第二导向板通过第二连接板连接第二连杆。第一导向板和第二导向板呈扇形结构。齿牙与第一导向板一体成型,齿牙与第二导向板一体成型。
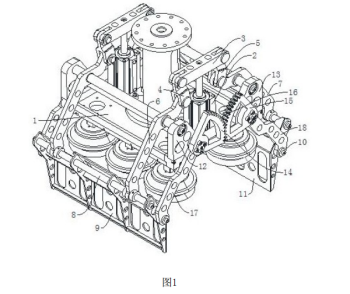
该结构在夹持、转运纸箱的过程中,气缸启动,气缸通过第一摇臂带动第一连接臂转动,第一连接臂通过第一连杆带动第一夹持板靠近纸箱的一侧,同理,气缸通过第二摇臂带动第二连接臂转动,第二连接臂通过第二连杆带动第二夹持
板靠近纸箱的另一侧,第一夹持板和第二夹持板夹持固定纸箱后,可以保证夹持固定的稳定性。
4.未来发展趋势
首先据推测,夹手结构的智能化将成为未来的发展趋势。随着人工智能和机器学习等技术的快速发展,夹手结构将能够通过学习和适应来提高抓取的准确性和稳定性。通过使用先进的传感器和视觉系统,夹手可以实时感知和识别不同形状、尺寸和材料的物体,并根据特定任务进行自适应调整,以实现更高效、精确的抓取和码垛操作。其次,夹手结构的柔性化和多功能化将可能成为发展的重点。传统的夹手结构通常采用固定形状和刚性材料,限制了其适应性和灵活性。未来的夹手结构将采用柔性材料和机构设计,具备更好的变形能力和适应性,可以适应复杂形状和不规则物体的抓取和码垛。此外,夹手结构将具备多种功能,如旋转、夹持力调节和物体姿态调整等,以满足不同任务的需求。第三,夹手结构的安全性和可靠性将进一步提高。在码垛过程中,安全是至关重要的考虑因素。未来的夹手结构将具备更高的安全特性,以防止意外事故和物体损坏。例如,夹手结构将配备更先进的传感器和检测系统,能够及时发现异常情况并采取相应的措施。此外,夹手结构还将具备自动监测和故障检测功能,能够在出现问题时及时识别和报警,确保系统的可靠性和稳定性。最后,夹手结构的集成化和协作化将得到进一步推进。随着工业4.0的快速发展,机器人与其他设备和系统的协同工作将变得越来越重要。夹手结构将与机器人控制系统、物料传输设备和物流管理系统等进行紧密集成,实现自动化的物料处理和码垛流程。此外,夹手结构还将具备与其他机器人或智能设备进行协作的能力,实现任务的分工与协同,提高整体系统的效率和灵活性。
5.机器人码垛夹手结构的集成化和协作化
机器人码垛的夹手结构的集成化和协作化是实现自动化物料处理和码垛流程的关键要素。随着工业4.0的发展和智能制造的兴起,夹手结构正朝着更高级的集成和协作方向发展。夹手结构的集成化是指它与机器人控制系统、物料传输设备和物流管理系统等之间的紧密集成。通过与这些系统的无缝连接,夹手结构能够实现与其他设备和系统的数据交换和协同工作。例如,夹手结构可以通过与机器人控制系统的集成,实现对夹手动作的精确控制和路径规划,确保抓取和码垛过程的准确性和效率。而夹手结构的协作化是指它与其他机器人或智能设备之间的协同工作。在复杂的物料处理和码垛任务中,多个机器人或设备之间的协作是必要的。夹手结构作为关键的抓取工具,需要与其他机器人的运动和操作进行协调和配合。通过先进的通信和协同控制技术,夹手结构可以与其他机器人实现任务的分工与协同,以提高整体系统的效率和灵活性。
集成化和协作化的发展还涉及夹手结构的传感器和感知能力。夹手结构可以配备各种传感器,如视觉传感器、力传感器和压力传感器等,用于感知周围环境和抓取物体的状态。通过实时获得物体的形状、位置、质量和力信息,夹手结构能够作出相应的调整和反馈,以实现精确的抓取和码垛操作。
结语
机器人码垛的夹手结构在未来将呈现智能化、柔性化、多功能化、安全可靠性和集成化协作化的发展趋势。这些发展将进一步推动机器人码垛技术在物流、制造业和仓储等领域的广泛应用,实现高效、精确和可持续地物料处理和码垛操作。
参考文献
[1]小型码垛机器人的结构分析与优化. 魏斐.,2016
[2]链条输送机的优化研究及应用. 房心国;王梓硕;包朋占;李士壮.,2022
[3]基于RobotStudio的码垛机器人工作站仿真设计. 区娟兰;陈晓康;张权芳;张天豪;王少位.,2022

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



