(深圳市房屋安全和工程质量检测鉴定中心,广东 深圳 518000)
[摘要] 通过使用智能监测云平台系统,使深圳某地铁隧道运营期实现了自动化监测,证明了该系统在地铁隧道保护监测中具有效率高、精度高、稳定性高的优点,可广泛应用于运营隧道结构安全监测中。
[关键词] 智能监测云平台;测量控制器;地铁隧道;自动化监测
中图分类号:U456.3 文献标识码:A文章编号:
Application of intelligent monitoring cloud platform system in subway tunnel monitoring
Bian Junjie, Wu Jia
(Shenzhen Building Safety and Construction Quality Testing and Appraisal Center, Shenzhen University, Guangdong 518000, China; )
Abstract:By using the intelligent monitoring cloud platform system, a subway tunnel in Shenzhen realizes the automated monitoring during the operation period, which proves that the system has the advantages of high efficiency, high accuracy and high stability in the subway tunnel protection and monitoring, and can be widely used in the safety monitoring of the operation tunnel structure.
Key words: Intelligent monitoring cloud platform; Measuring controller; Metro tunnel protection monitoring
0引言
[1]随着经济的发展,目前我国很多城市的城市地铁建设飞速发展,而在既有地铁隧道控制范围内的相关施工也越来越多,因此,地铁保护区范围内的施工对地铁隧道结构稳定性影响成为保护地铁安全运行的重要一环。而运营隧道只有夜间地铁停运期间才能进行人工监测,无法实时了解隧道的安全状况。于这种现状,本文采用了智能监测云平台系统实现了自动化监测,运用自动化监测技术实现对地铁隧道的全天候实时监测,远程分析监测数据,提高监测效率和监测质量[1-3] 。
1智能监测云平台的系统组成
1.1硬件组成部分

图1自动化监测系统构成框架图
Fig 1 Framework Diagram of Automatic Monitoring System
(1)测量机器人:具有自动识别系统(Auto-mati target recognition,ATR)的全站仪。在系统软件的控制下对测量目标点进行距离、角度数据自动采集。
(2)棱镜:安装在基准点与测量点之上,通过膨胀螺丝连接,通过对全站仪激光的反射得出三维坐标。
(3)智能测量控制器DT-IMC1000(简称IMC):内置了功能强大的工控电脑及针对地铁结构安全监测的各类监测设备的采集与数据解算软件,设备具有丰富的外部接口,多种模式的测量通讯方式,可直接连接操控测量机器人。
(4)计算机:主要是监控中心主控计算机负责接收现场数据。
(5)电源控制箱:由市电转为直流电为全站仪续航提供保障。
1.2 软件组成部分
智能监测云平台系统软件部分主要是由控制软件系统、自动化监测软件系统、数据分析处理软件系统等三大部分的模块组成。
(1) 控制软件系统
控制软件系统主要是通过接收监控中心计算机下发的测量命令,对测量机器人发出操作指令,使其按照设定好的流程进行设站,再进行距离、角度进行测量,最后接收测量机器人返回的信息、数据。
(2) 监测软件系统
监测软件系统主要是对监测目标数据进行计算得出整体变形情况,实时地将当前测量信息反馈到监控中心。当点位暂时被遮挡时,将暂停测量,延迟一段时间后,继续测量该点位。如果此时目标点位仍被遮挡,还可以定义一个最大重复测量数,全站仪将按照延迟的时间重新测量。假如该目标点一直被遮挡,仪器进行最大的努力后,仍不能测量该点时自动转到下一个目标点进行测量。在监测点较多时,监测软件系统可以设置监测作业完成时间,控制仪器旋转、照准时间,保证仪器的稳定提高监测成果的精度。
(3)分析处理软件系统
分析处理软件系统主要是对监测数据进行分析处理,将测量中的误差通过修正模型进行削弱或消除,并可以将监测结果通过报表及曲线图的形式导出。当监测点的超过设定的警戒值,系统自动启动报警程序( 包括短消息报警、电子邮件报警、电话报警等) 。

图2 监测云平台界面图
Fig2 Monitoring Cloud Platform Interface
3工程应用实例
3.1工程概况
本文选用的的项目为新皇岗口岸联检大楼项目,场地位于深圳市福田区皇岗口岸,百合三路以南,皇岗路以东。拟建该项目将在原口岸联检大楼的用地上整体重建,基坑开挖深度22.50m~24.30m,基坑周长约1129m,面积约79496.1㎡,北侧为7号线地铁皇岗口岸站,距离基坑边线约9.7m~13.6m。毗邻地铁基坑北侧边长约330m,深基坑开挖施工过程中影响地铁安全的长度约395 m,隧道与基坑位置关系如图5所示。
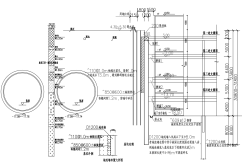
图3 隧道与基坑位置关系示意图
Fig 3Diagram of Position Relation between Tunnel and Foundation Pit
3.2实施方案
3.2.1基准点及监测点埋设
相应的地铁车站及隧道左、右线对应的里程为DK18+941.6~DK19+336.6,按5米一个断面,共布设80个断面,地铁站台区域断面布设3个监测点,隧道曲线段区域布设5个监测点。在受影响的区域以外的两端分别布设3个控制点,采用4台测量机器人实现自动化联测作业,监测断面平面布设示意图如图1所示。

图4 监测断面平面布设示意图
Fig 4Monitoring section plane layout diagram
3.2现场联测作业方法
(1)测站设置,按长度395m将待测区(受施工影响区域)分为n个测段,具体长度根据现场测站可视长度适当调整,将全站仪安装于测段中间位置;
(2)段与段之间布设双面棱镜作为不同段之间的联测点,联测点数量不少于3个,用于组合计算过程坐标数据递推;
(3)参数设置,第一次监测前对测站限差、角度和距离测回数、监测时间以及计算机与测量机器人之间的通讯参数等进行设置;
(4)学习测量,第一次监测需要使用人工监测方法对基准点和监测点进行初始空间三维坐标采集,得到概略空间位置。
(5)自动测量,通过智能测量控制器向每台测量机器人发送采集命令,测量机器人按周期设定及测点顺序对应测段内的测点进行角度及距离数据的采集,并记录所采集的数据;
(6)数据处理,所有采集到的角度及距离数据组合解算得到三维坐标,通过三维坐标计算测点变化量,再输出监测数据结果表。

图5测站联测示意图
Fig 5 Schematic Diagram of Station Joint Survey
3.3变形结果分析
3.3.1监测项目精度要求与报警指标
(1)本项目的精度要求根据《工程测量标准》GB50026-2020 [6]、《建筑变形测量规范》JGJ8-2016[7]要求,每个测点需要进行一测回监测,一测回水平方向标准差≤1.0″,测距中误差≤1mm+2ppm,等级为一级的位移监测点坐标中误差≤1mm。
(2)本项目的报警指标由设计单位给出具体数值见下表:
表1 隧道监测项目报警指标一览表
Table 1 Alarm indexes of tunnel monitoring
Project
序号 | 监测项目 | 预警值 | 报警值 | 控制值 |
1 | 水平位移 | 6.0mm | 8.0mm | 10.0mm |
2 | 竖向位移 | 6.0mm | 8.0mm | 10.0mm |
3.3.2监测数据分析
运营隧道的变形监测工作从隧道相邻的基坑施工前开始,基坑桩基施工时每天1次,土方开挖及回填结束前每天2次,基坑回填后至地铁设施变形进入稳定阶段,即达到《建筑变形测量规范》JGJ8-2016规定的最后100天的沉降速率小于0.01~0.04mm/d后方可向地铁集团申停止监测,目前已监测259天,共计监测62次,期间待监测点埋设完毕后仅需投入一名监测人员进行日常数据处理及设备定期维护即可,极高的提升了监测工作的效率,证明该系统效率高。
智能监测云平台系统根据坐标中误差计算公式:m=sqrt([△△]/n)(1)式中:△测量值-真值,n为次数以对测量成果中误差进行计算。待部份监测任务完成后,对监测结果的精度进行统计(表2),选取中误差最大的三个监测点数据为例进行分析,结果表明其中中误差最大的三个监测点均符合《建筑变形测量规范》JGJ8-2016中等级为一级的位移监测点坐标中误差精度要求小于1mm,证明该系统精度高。
表2 隧道监测精度统计表
Table 2 Statistical table of tunnel monitoring accuracy
序号 | 点号 | dX (mm) | dY (mm) | dZ (mm) |
1 | Y40-2 | 0.09 | 0.45 | 0.31 |
2 | Y18-4 | 0.04 | 0.21 | 0.41 |
3 | Y1-5 | 0.16 | 0.11 | 0.14 |
从监测结果统计表(表3)及选取部分剖面变化曲线(图6)可以看出:在整个基坑桩基施工过程中隧道监测区域变形较小,左线水平位移监测点最大的为Z42-1点累计向右位移1.7mm,竖向位移监测点最大的为Z55-3点累计上升1.4mm,右线水平位移监测点最大的为Y32-3点累计向右位移1.8mm,竖向位移监测点最大的为Y39-2点累计上升1.5mm,均未超出设计及规范要求的预警值,数据反映出隧道变形处于安全范围内且数据较为稳定,隧道运营一直处于安全状态,隧道自动化监测在基坑施工过程保护了地铁的安全运营,证明该系统稳定性高。
表3 隧道监测成果统计表
Table 2 Statistics of tunnel monitoring results
序号 | 左右线 | 点号 | 水平 位移(mm) | 点号 | 竖向 位移(mm) |
1 | 左线 | Z42-1 | +1.3 | Z55-3 | +1.4 |
2 | 右线 | Y32-3 | +1.8 | Y36-2 | +1.5 |
备注 | 1、面向隧道里程变大方向,“+”表示向右移动,“-”表示向左移动; 2、“+”测点表示上升,“-”表示下降。 | ||||
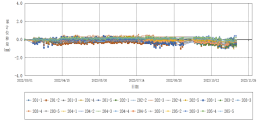
图6 左线位移时程变化曲线图
Figure 6 Time time change graph of the left line
5结论
本项目通过使用智能监测云平台系统对运营隧道的监测任务顺利完成,证明了该系统在地铁隧道保护监测中具有效率高、精度高、稳定性高的优点,可广泛应用于运营隧道结构安全监测中。
参考文献:
[1]鲁罕.自动化监测技术在基坑施工中对既有地铁隧道影响的应用研究[J].科技创新导报,2018,15(22):13-14.
[2] 廖海山,李盈洲.自动变形监测系统在运营地铁隧道监测中的应用[J].测绘与空间地理信息,2021,44(02):193-195+198.
[3]曾贤敏,黄腾,李桂华.地铁隧道保护区变形监测信息管理系统设计与实现[J].测绘与空间地理信息,2015,38(01):107-110.
[4]刘振贵.Geo-RDMAS在铂顿商业中心项目地铁隧道自动化监测中的应用[J].广东土木与建筑,2011,18(08):44-46.
[5]余锐.测量机器人地铁隧道监测程序设计与实现[J].工程勘察,2018,46(02):62-66.
[6]《工程测量标准》(GB50026-2020)[S].中国计划出版社,2019.
[7]《建筑变形测量规范》(JGJ8-2016)[S].中国计划出版社,2016.
姓名 | 边俊杰 | 邮寄地址 | 广东省深圳市南山区南头街道南山建工村工程质量大厦403 | ||||
性别 | 男 | ||||||
出生年月 | 1988.09 | 主要从事工作 | 监测 | 投稿日期 | 2022年11月7日 | ||
职称 | 中级工程师 | 806756151@qq.com | 联系电话 | 13670237010 | |||
学历 | 本科 | 基金项目 | / | ||||
[作者简介] 边俊杰,大学本科,中级工程师,E-mail: 806756151@qq.com
[收稿日期]

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号


