长江师范学院
长江师范学院机器人工程学院
长江师范学院机器人工程学院
长江师范学院电子信息工程学院
长江师范学院科创学院
摘 要
离子聚合物金属复合材料(IPMC)是一种电活性聚合物材料(EAP)类的一种,它由离子聚合物和金属附着的复合物构成。在水下有稳定工作状态、产生的弯曲形变大、柔性好、质量轻、耗能低等优点。研究IPMC性能优化及其仿生机器人的设计有利于使制得的IPMC材料更加优质以及运用场景更加丰富。
关键词:IPMC;材料制备;仿生鱼
1引言
IPMC全称为离子聚合金属复合材料(IonicPolymer-MetalComposite),是一种具有特殊功能的新型材料。它的主要特点是具有良好的电化学活性和机械可变性能,可以实现电-机-化耦合作用。IPMC有着广泛的应用领域,如智能材料、传感器、微机电系统、机器人等[1]。
2 IPMC材料制备
基体材料预处理包括基体膜的糙化、切边和清洗。糙化采用喷砂的方法。切边是将糙化后的基体膜切割成规定尺寸。清洗包括超声波清洗、煮洗和去离子水煮洗,以去除杂质离子和增加IPMC材料的储水能力。
浸泡还原液包括配制Pd盐溶液和还原液,将预处理过的基体膜浸泡在Pd盐溶液中还原镀。还原液使用NaBH4作为还原剂。浸泡和还原镀的时间、次数根据实验需求而定。
表面电镀包括切边处理和电镀。切边处理防止预镀膜在电镀时上下电极层导通导致电镀不均匀。电镀液选择含有贵金属盐,电压控制在0.5-10V,电流控制在0.001-0.5A。使用钛等活泼金属作为阳极,电镀阴极为阵列式金属探针。电镀后得到IPMC材料。
后处理是将IPMC边缘切边处理,然后进行Na离子交换[2]。
3 IPMC仿生鱼设计
3.1 IPMC材料运用仿生鱼的优势
IPMC材料因其柔韧性和流线型设计,可以模仿仿生鱼的鳍、鳍条、鳍膜等结构,具有以下优势:其良好的水动力学性能可提高推进力和速度;高灵敏度和快速响应能力可帮助仿生鱼适应水中环境变化和应对挑战;同时,IPMC材料具有良好的生物相容性和耐用性,可使仿生鱼更健康且更耐用,从而更好地完成任务[3]。
3.2 仿生鱼结构的形状和尺寸
IPMC仿生鱼机器人模仿了魔鬼鱼的外形,具有大型胸鳍和倒三角形的鱼尾。其推进方式包括身体/尾鳍推进模式、中央鳍/对鳍推进模式和混合鳍推进模式。其中,身体/尾鳍推进模式通过波浪形舒缩运动或尾鳍摆动提供推进力,是最常见的方式。中央鳍/对鳍推进模式依赖于胸鳍或腹鳍的力量来提供推进力,可以实现高机动性和精度,但速度和效率较低。混合鳍推进模式则是以上两种推进方式的综合,能够平衡速度和机动性。由于IPMC材料自身的特性会影响控制系统的复杂度,采用单片尾鳍推进结构能够保持控制系统简洁,并实现较高的游速。此外,倒三角形的鱼尾能够提高仿生鱼的稳定性和灵活性。综合对比不同推进方式,BCF推进模式的仿生鱼能够实现较高的游速和较广的游动能力范围分布,如图3-1所示,仿生鱼结构设计采用BCF推进模式, 使用单片尾鳍推进, 仿生鱼总长度15.4 cm, 其中鱼体长8.4 cm, 宽4.9 cm, 总质量42.7 g。
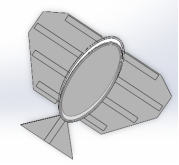
图3-1 IPMC仿生鱼三维模型
3.2.1 鱼鳍设计
仿生魔鬼鱼的大型胸鳍被广泛应用于仿生鱼的结构设计中,其优点包括提高稳定性、提供推进力、实现精确机动性、增加美观性和满足应用需求。这种设计能够使仿生鱼在水中游动时更加稳定,避免失去平衡,同时具备快速游动的能力和精确的机动性。外观设计也更加逼真,增加了美观性和可爱度。这种设计可以满足不同的应用需求,如水下勘探、水下作业、水生生物学研究等,并随着技术进步不断发展和完善。
3.2.2 鱼尾设计
在仿生机器鱼的设计中,采用倒三角型鱼尾是非常常见的选择。这种鱼尾结构能够将水流动的能量转换成机器鱼的推进力,进而提高机器鱼的游动效率和速度。实现精确的机动控制。倒三角型鱼尾的设计能够通过控制鱼尾的运动来实现机器鱼的转向、停止等机动控制。这种设计能够使机器鱼实现高效、精确的机动控制,从而更加适应不同的应用场景。倒三角型鱼尾的设计能够提高机器鱼的稳定。具体来说,这种鱼尾结构能够减小机器鱼游动时的侧滑,从而增加机器鱼的稳定性。
3.4 仿生鱼流体力学仿真
3.4.1 仿真初始条件设置
首先设置仿生鱼所受到Y轴方向9.81㎨重力。接下来,需要设置仿生鱼所在的流体环境。创建一个流体域,并选择相应的流体模型。然后设置流体域的边界条件,包括流体入口和出口,以及仿生鱼所在的边界。
在设置流体初始条件时,需要考虑仿生鱼所处的水体环境。根据实际情况,选择水作为流体模型,选择流体的滚动类型、层流和湍流。
最后设置仿生鱼自身的运动情况。本次仿真中仿生鱼处于0.5米深的水中运动,根据公式(3-1)计算得到仿生鱼所受到的压力为4900Pa。同时,我们还需要设定仿生鱼的运动速度为
0.5m/s,这能够更准确地模拟仿生鱼在水中的实际运动情况。
![]() (3-1)
(3-1)
3.4.2 设置计算域
计算域是指在流体仿真过程中建立的计算空间,它包含了流体和外部物体的几何形状和边界条件。在计算域中,流体仿真软件会计算流体在不同时间段内的运动状态和性能表现,从而预测流体在实际环境中的行为。本次仿真计算域是根据仿生鱼模型设置,最终确定计算域长为20cm、宽为15cm、高为10cm。
3.4.3 流体速度分析
通过观察图3-2和图3-3,我们可以发现,在仿生鱼运动时,仿生鱼身体带动上下方的流体运动速度加快,而仿生鱼尾部的扇动则会导致尾部流体方向改变,并与仿生鱼的运动方向一致。这些现象对仿生鱼的运动特性和性能表现都有一定的影响。具体来说,上下方液体流动速度的加快可以为仿生鱼提供额外的推动力,并降低水流的阻力,从而提高仿生鱼的运动效率和速度。同时,这种流动速度加快的现象也说明了仿生鱼身体表面的设计和纹理可以起到减阻和增加推力的作用。另一方面,尾部流体方向改变的现象则为仿生鱼提供了更加灵活的运动方式和机动性。通过改变尾部的扇动频率和角度,仿生鱼可以实现不同方向和速度的转向和加速,从而适应不同的水流环境和任务需求。
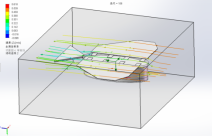
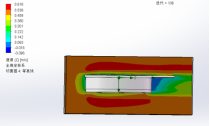
图3-2 仿生鱼流体速度切面图 图3-3 仿生鱼流体速度流动轨迹图
4 总结
4.1总结
本文利用IPMC材料制作的仿生鱼鳍和鱼尾,能够模拟鱼类的游泳方式,使仿生鱼的性能更加优越。在仿生鱼鳍方面,IPMC材料被用作柔性鱼鳍的控制器件,可以实现高效的运动控制。利用IPMC材料的高响应速度和大变形能力,可以快速调整鱼鳍的形态和角度,从而实现仿生鱼的高效游动。在仿生鱼尾方面,IPMC材料主要应用于制作柔性尾鳍,以实现仿生鱼的游泳运动。利用IPMC材料的形状记忆特性和较大的变形能力,可以有效地调整尾鳍的形态和角度,从而实现仿生鱼的高效游动。实现IPMC与仿生鱼结合。
参考文献
[1]田爱芬,孙悦,王茜茜,李佳华,张新荣,王洪彦.IPMC柔性驱动材料研究进展[J].现代化工,2022,42(04):48-52.DOI:10.16606/j.cnki.issn0253-4320.2022.04.010.
[2]吴清云,谢辰旻,林志豪,张新月,毋鑫鹏.一种监测集鱼一体化仿生机器鱼设计[J].水产养殖,2022,43(01):67-71.
[3]张鹏,王彦卿,薛继陈,杜野,梁博,马英杰.Ag-IPMC的制备及其在仿生鱼中的应用研究[J].机械工程与自动化,2018(04):28-29+32[5]
![]()
1、陈胜楠(工作单位:长江师范学院 机器人工程学院 重庆408100)
陈胜楠(2002.01),女 汉族 四川达州人,学生,机器人工程专业
2、宋永石(工作单位:长江师范学院机器人工程学院 重庆涪陵 408000)
宋永石(1986.10),男 汉族 黑龙江巴彦县人,研究生,教师,机器人工程学院教师
3、王孝茹(工作单位:长江师范学院机器人工程学院 重庆涪陵 408000)
王孝茹(2002.9),女 汉族 甘肃庆阳人,在读本科,学生,机器人工程学院学生
4、殷涛(工作单位:长江师范学院电子信息工程学院 重庆408100)
殷涛(2001.10),男 汉族 重庆南川人,学生,电子信息科学与技术专业
5、栗圣洋(工作单位:长江师范学院科创学院重庆涪陵408000)
栗圣洋(2004.5),男汉族山西大同人,学生

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



