解放军61243部队 新疆乌鲁木齐 830000
摘要 CORS系统的定位精度检测是系统用户最为关心的一项内容,也是决定系统整体性能的重要内容之一。文中简述了CORS系统定位误差源,分析比较了几种常用定位精度测试方法的优缺点,利用千寻CORS系统完成某项目控制测量,对该系统的定位精度进行了测试和评价分析。测试结果表明,该系统定位精度可靠性高,可满足作业需求。
关键词CORS;RTK;偏差;内符合精度;外符合精度
随着城市建设速度加快,对等级较低的控制点破坏很大,用户单位要么重新布站观测,要么采用导线的方式联测,浪费人力物力,精度也难以保证。CORS系统的建立,可以大大提高测绘作业效率,降低野外作业强度和成本,通过动态、连续的定位框架基准,为用户提供全自动、全天候、实时的高精度空间和时间信息,与传统的GPS作业相比,CORS系统有作用范围广、精度高、野外单机作业等优点。建成的CORS系统是否能够提供连续、动态和高精度的空间定位服务,是否满足多类用户实时定位以及事后数据处理高精度定位应用需求,很大程度上取决于系统的定位精度[1]。此外,在利用CORS系统进行具体项目测量作业前,也应对此定位精度进行简单测试,以确保作业成果质量是否符合规范要求。本文在简单介绍CORS系统定位误差源的基础上,重点分析和比较CORS系统定位精度可靠性的检验方法,并结合千寻CORS系统,对该系统的定位精度进行测试和评价分析。
1.CORS系统定位中的主要误差源
CORS系统定位误差主要是由基准站GNSS观测误差、流动站观测误差和差分误差信息的数学内插模型等引起的。其中前两项误差与常规RTK定位中出现的误差基本等同,以系统误差的危害性为重,并大多有规律可循,因此要提高 CORS定位精度是以分析该部分误差源与消除方法为主[2]。也可把CORS的误差源划分为非空间相关和空间相关误差来处理,非空间相关误差有卫星钟钟差、接收机钟差、接收机噪声、多路径效应等等;而空间相关误差包括轨道误差、对流层延迟误差和电离层延迟误差等[3]。对CORS误差源划分不同,但在本质是一样的,都是通过对各种误差削弱或消除的方法研究,以提高其定位精度。
2.CORS系统定位精度测试方法
目前,用于评估CORS系统定位精度的方法较多,且每种方法各有其不同适用情况及优缺点。常用的有静态已知点检测方法、实时动态观测值与后处理结果比较的检测方法、反算基线长法、动态规则几何轨迹检测方法、固定基线长度相对检测方法以及高程影响检测法和空间因子检测法等。但从用户检测原理和实现难易程度考虑,以下两种方法在实践应用中较为普遍。
2.1 静态已知点检测法
CORS定位精度检测中最常用最易实现的方法就是静态已知点检测法[4]。具体方法为:在系统覆盖区域内选择具有代表性的、已知精确坐标的检测点,将接收机架设在已知点上进行RTK测量,将测量结果与已知成果进行比对,得到在检测点上RTK测量的内、外符合精度。
内符合精度用于评定CORS系统定位的稳定性程度。具体方法是计算每一点所有测量值的算术平均值,再将该算术平均值与每一测量值求差,分析统计出平面和高程方向差值的分布,以反映系统实时定位的稳定性和收敛性。计算公式为:
![]() (1)
(1)
其中:![]() 是测试点观测值与其算术平均值的差值;
是测试点观测值与其算术平均值的差值;![]() 为观测值总数。
为观测值总数。
外符合精度反映CORS系统定位的准确性,也就是RTK定位结果与真值的偏离程度。具体方法是:在已知点上架设仪器进行RTK测量,将所得结果与该点已知成果相比较,来分析平面和高程偏差。其计算公式为:
![]()
其中:![]() 是检测点的总数;
是检测点的总数;![]() 为检测点上RTK测量值与已知坐标的差值。
为检测点上RTK测量值与已知坐标的差值。
静态已知点检测法的优点是原理简单、便于实现、能准确体现CORS系统的定位精度;缺点是需要检测点位的精确成果,如果在系统覆盖区域没有已知点或者已知点坐标基准不统一,则该方法无法实施[5]。
2.2与后处理结果比较法
与后处理结果比较法的原理与静态已知点检测法相同。具体做法为:事先选定检测点,先进行静态观测,再利用千寻CORS进行RTK测量,把静态测量结果作为真值,与RTK定位结果进行比较,来确定CORS系统定位结果的可靠性。其优点是测区内无需已知点,便于实施精度检测,快捷有效;缺点是静态测量结果易受观测环境和其他条件影响,从而影响检测精度的可靠性。
3.测试结果及分析
笔者参与某项目控制测量项目,测区为矩形区域,地处黄土高原与内蒙古高原的过渡地带,地貌形态丰富,地势南高北低,从西南向东北方向延伸。全区以丘陵和山地地形为主,高差较大。该项目共测量像控点400多个,技术设计规定:利用CORS测量,测回数为4,每测回观测历元数20个,采样间隔1秒,设置单次观测平面收敛精度≤2cm,高程收敛精度≤3cm,各测回平面和高程较差≤4cm,取各测回中数作为最终结果
。
3.1静态已知点法检测结果及分析
现抽取其中164点位进行数据精度分析,因每个点位CORS测量共有80个观测值,数据量偏大,因此,文中选取每个点位最大偏差作为代表进行分析,平面与高程偏差如下图:

![]()
从上图可以看出,164个点中,平面位置最大偏差3.2mm,高程最大偏差5.4mm,远小于技术设计中4cm的精度要求。
根据公式(1),抽取其中三天42个点进行北向、东向和高程内符合精度计算,结果见下图:

![]()
通过上图可以看出,北向和东向内符合精度绝大部分小于1cm,高程方面精度稍差,个别点位内符合精度超过2cm。北向平均精度为0.34cm,东向平均精度为0.32cm,高程平均精度0.84cm。
从上述精度统计来看,千寻CORS的系统稳定度非常好,内符合精度完全满足技术设计要求。技术设计中,相片控制点使用RTK接收设备采用网络CORS测量模式施测时,必须进行精度检核,根据全球定位系统实时动态测量技术规范,平面和高程坐标偏差不应大于7cm[6]。已知点利用情况见下表:
表1 已知点利用情况
点位等级 | 国家B级点 | 地壳运动观测网络点 |
数量/个 | 8 | 1 |
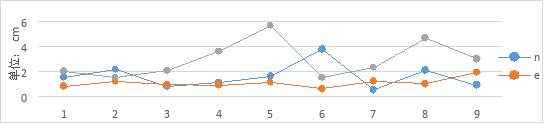
作业中,把已知点成果看作真值,利用千寻CORS共进行9个点位39次RTK测量,点位偏差分布图如下:

![]()
从上图可以看出,平面偏差最大值3.9cm,最小值0.7cm,平均偏差2.3cm;高程偏差最大值7cm,最小值0.2cm,大部分点位偏差小于4cm,没有点位偏差超过技术设计规定。
根据公式(2),对9个点位进行外符合精度计算,结果见下图:
![]()
3.2 与后处理结果比较法检测结果及分析
作业前,为有效控制成果质量,采用静态相对定位模式,按照E级点精度,共在四地联测8个E级点,用于每天精度检核。作业中,共进行93次精度检核,点位偏差分布图如下:

![]()
从上图可以看出,平面偏差最大值6.9cm,最小值1.2cm,平均偏差2.9cm;高程偏差最大值6.4cm,最小值0.7cm,平均偏差3.9cm,没有点位偏差超过技术设计规定。
根据公式(2)可得,计算8个点与后处理结果比较法的三个方向外符合精度,见下图:

![]()
从上图可以看出,北向、东向外符合精度远小于高程方向。
表2两种方法精度偏差统计
检测方法 检测结果 | 静态已知点检测法 | 与后处理结果比较法 | |||
平面偏差(cm) | 高程偏差(cm) | 平面偏差(cm) | 高程偏差(cm) | ||
精度统计 | 最大值 | 3.9 | 7.0 | 6.9 | 6.4 |
最小值 | 0.7 | 0.2 | 1.2 | 0.7 | |
平均值 | 2.3 | 2.3 | 2.9 | 3.9 | |
精度分布 | 0-3cm | 94.9% | 74.4% | 64.2% | 24.7% |
3-7cm | 5.1% | 25.6% | 35.8% | 75.3% | |
7cm以上 | 0% | 0% | 0% | 0% | |
从上表可以看出,内符合精度偏差分布,绝大部分点位平面偏差小于2mm,高程偏差也呈正态分布,小于2mm的占比 74.1%。外符合精度平面偏差分布很集中,偏差小于3cm的点位占总点数的94.9%,没有点位超过7cm;高程偏差分布较为集中,也没有偏差超过7cm。通过上表可以看出,采用静态已知点检测法,偏差分布较小,且比较集中,大部分偏差小于3cm;采用与后处理比较法,偏差分布较为分散,尤其是高程偏差大部分分散在3-7cm之间。前者平面、高程的平均偏差和外符合精度均小于后者,这也间接印证了第二种方法会受静态测量结果精度的影响。但采用以上两种方法进行检核,点位偏差均符合技术设计和规范要求。
4.结论
本文在使用千寻CORS系统进行作业时,采用静态已知点检测法、与后处理结果比较法两种检测方法,对此系统定位精度进行了检测。检测结果表明,利用千寻CORS系统进行实时定位测量,内符合精度可靠、稳定,偏差很小;外符合精度偏差较小,能满足技术设计和规范要求,可靠性高。该系统能为数字测图、控制测量、GIS数据采集等应用提供快速高效的定位成果,在自动驾驶、无人机飞控、精准农业等领域有着广泛的应用前景。通过数据比对分析可以看出,进行CORS系统定位精度可靠性检测,要针对不同项目的应用需求,灵活运用检测方法,以便全面、客观地对其定位精度进行检测,确保系统的可靠性、稳定性。
参考文献
[1] 蔡成辉,刘立龙,黎峻宇等. CORS 定位精度的可靠性研究[J].地理空间信息,2014,12(6):74-75.
[2] 徐文兵. GPS连续运行参考站系统(CORS)定位精度的可靠性研究[D].合肥工业大学硕士论文,2009年4月.
[3] 陈 昇. CORS站系统定位精度分析及检测方法的研究[D].昆明理工大学硕士论文,2011年5月.
[4] 王 妍,孔祥仲,韩晓冰.华测连续参考站系统(CORS) 定位精度检测方法[J].测绘与空间地理信息,2012,35(4):156-157.
[5] 王锴华,汪 洋,刘鸿飞.基于单基站的航运CORS系统动态精度测试与分析[J].测绘地理信息,2014,40(1):12-13.
[6] 中华人民共和国测绘行业标准.全球定位系统实时动态测量(RTK)技术规范( GH/T2009-2010) [S].北京:中国计划出版社, 2010.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



