刘昕 ,高金龙
(1.海装沈阳局,黑龙江省齐齐哈尔市 16100;2.中国一重集团有限公司专项装备研究所 ,辽宁省大连市116113)
摘 要:本文以某装备卡锁机构为研究对象,使用ADAMS软件建立动力学参数化模型,对机构进行了运动仿真,得到了机构的运动规律与动力学响应,提取了关键零部件受力曲线,为卡锁结构的分析、优化和改进设计提供理论依据。
关键词: 参数化建模 ADAMS 动力学仿真 卡锁机构
0 引 言
卡锁机构结构复杂、紧凑,受力作用大,机构动作迅速,机械系统参数多等特点,其在装备中起到至关重要的作用,因此需要对卡锁机构动作和运动特性进行深入研究,保证卡锁机构操纵稳定性和动作可靠性。其机构动作复杂,机械系统参数多,难以进行理论解析计算,本文使用多体动力学软件ADAMS/View建立卡锁仿真模型,计算在实际工况下机械系统的运动规律和动力学响应,为卡锁机械系统的设计、分析与优化提供参考和依据。
1 ADAMS仿真模型的建立
1.1 卡锁机构模型
某装备的卡锁机构简化模型如图1所示,当输料机运动到指定位置时,熟料机挂接凸块与卡锁接触,熟料机挂接在卡锁上,卡锁使熟料机保持在待发状态,当得到指令时,卡锁动作解锁熟料机,熟料机被释放并推动物料运动。

图 1 卡锁机构
卡锁机构主要由箱体、卡锁、连杆杠杆机构、导向杆和缓冲装置组成,当熟料机挂接在卡锁上时,杠杆与连杆形成弓形支撑,当推杆在液压作用下伸出,推动弓形支撑转动,最后弓形支撑破坏,卡锁逆时针转动,熟料机被释放推动物料运动。
1.2 卡锁机构仿真模型建立
将上述卡锁机构模型导入ADAMS中,设置仿真模型参数,包括初始位置,力和位移等边界条件,根据模型运动关系,添加约束和运动副,对动作过程中相互接触的部件添加接触关系。建立卡锁机构的仿真模型如图2所示。
按照弹簧性能参数,设置卡锁机构中的弹簧刚度系数和预压值等参数,其中弹簧1的刚度系数为3.48N/mm,预压值为254.8N,弹簧2的刚度系数为22.95N/mm,预压值为130.83N,由于环形弹簧和蝶形弹簧均作用于缓冲器活塞上,仿真中将两者合并为一个弹簧进行参数设置,其刚度系数为5833N/mm,预压值为0N。设置输料机作用力沿Y轴方向水平向右,大小为14000N,模型中设推杆匀速伸出,伸出速度为166.67mm/s。
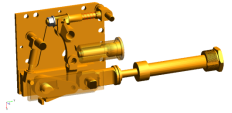
图 2 卡锁ADAMS模型
2 仿真结果分析
2.1 机构动作分析
仿真运动开始时,输料机在力的作用下向右运动并挂接在卡锁上,趋向于使卡锁绕销轴旋转,卡锁的杠杆与连杆组成的弓形支撑靠在推杆上,机构挂接的状态如图3所示。其中卡锁和限动块通过两个活动的衬板和销轴接合在一起,由缓冲装置在输料机挂接时起到缓冲作用并制动卡锁。

图 3 输料机挂接初始位置
随后推杆伸出,杠杆围绕销轴转动,杠杆与连杆的角度逐渐变大,弹簧被压缩,当推杆推出到达一定位移量时,弓形支撑到达临界状态后,推杆继续伸出,弓形支撑被破坏,输料机挂接凸块被释放,同时机构在力的作用下迅速反向转动并压缩弹簧,当导向滑块和导向杆接触时到达极限位置,随后在弹簧力的作用下机构复位,弓形支撑破坏时状态如图4所示。

图4弓形支撑位于极限位置
2.2 机构运动参数分析
对仿真结果分析得到输料机动作时机如图5所示,仿真开始时,输料机动作并挂接在卡锁上,弓形支撑靠在推杆上,初始角度169.11°,随后推杆伸出,弹簧2被压缩,卡锁转动。当推杆伸出量为5.106mm时,弓形支撑角度为180°,杠杆与连杆呈一条直线,但由于弹簧2力的支撑作用,此时卡锁机构仍未达到解锁状态。当推杆伸出5.592mm时,弓形支撑为临界状态,此时角度为181.49°时。随着推杆继续伸出,弓形支撑被破坏,弓形支撑迅速动作,输料机释放,当弓形支撑角度为277.48°时,导向杆和导向滑块接触作用,弓形机构到达极限位置,随后在弹簧力的作用下复位,由弓形支撑角度变化图可知,由于输料机的对卡锁机构的作用力较大,当弓形支撑破坏解锁的瞬间,机构迅速解锁并回位。
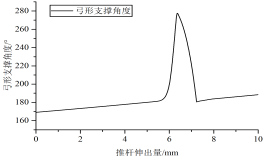
图 5弓形支撑角度与推杆伸出量关系
推杆受力与推杆位移之间的关系如图6所示,排除冲击力作用下,在推杆未伸出,输料机挂接时推杆受力达到最大为1754.08N,此时在推杆轴向(Y轴)方向分力为1735.94N,推杆径向(X轴)分力-251.58N,当到临界位置时,推杆受力为0N。
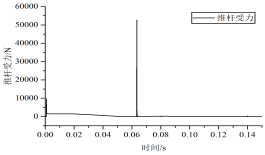
图 6推杆受力与推杆位移之间关系
卡锁机构解锁时,测量卡锁转动的角度为0.328度,解锁后由于力的作用和惯性,卡锁继续转动,当导向滑块与导向杆接触时,卡锁角度达到最大
35.38度,卡锁转动角度如图7所示。由图可知,在未解锁前,机构的解锁主要依靠弓形支撑转动,卡锁转动角度仅有0.3°,卡锁角加速度变化小,减少了卡锁机构解锁运动对输料机挂接状态的影响,挂接凸块与卡锁的接触面积基本未发生变化,输料机位置与状态波动小,表明弓形支撑解锁机构具有较好的稳定性。
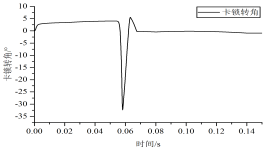
图 7卡锁转动角度
对销轴受力情况进行分析,得到销轴的受力如图8所示。卡锁解锁时,销轴会向上运动,磕碰到衬板孔的上部,此时碰撞受力最大为16304.41N,之后下落时碰撞受力最大为-11332.59N。
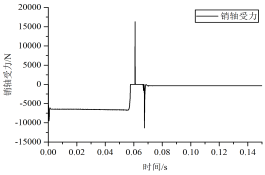
图 8 销轴受力与时间关系
由于卡锁机构结构紧凑复杂,运功部件多,实际加工后,运动面之间的加工误差,润滑不到位,存在飞边毛刺等均可能存在影响机构运动。提取卡锁-连杆支撑的反作用力如图9所示
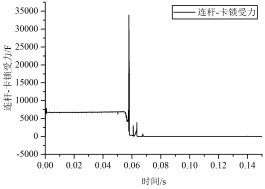
图 9 卡锁受到的反作用力
经过仿真模拟,熟料机的受力为14000N,作用力臂为30mm,转化对卡锁的力矩为420N•m,在连杆的支撑反力为6813N,作用力臂为64.77mm,转化对卡锁的力矩为441.27N•m,因为在机构运动中,力臂会有所变化,因此选取两者中较大者作为机构解锁中所需力矩,最大力矩为441.27N•m,因此,如果当连杆、卡锁等机构受到阻力距达到441.27N•m时,卡锁将会卡滞而不能正常动作解锁或及时解锁,从而发生故障。因此对于卡锁机构,应保持连杆,卡锁等运动部件转动灵活,与其接触的衬板等表面平滑,加工面平整,无毛刺飞边等异物,定期进行润滑与保养,保证机构动作正常。
3 结 论
本文对装备使用的卡锁机构进行分析,得到以下结论
1)通过ADAMS软件建立了卡锁机构的仿真模型,模拟了卡锁挂接和解锁动作工作状态,验证了机构动作的正确性。
2)对卡锁机构运动分析,提取了机构运动规律和动力学响应,得到机构力学性能参数,并结合运动特性给出分析结果。
3)分析机构零件受力情况,为零部件的强度设计与校核提供依据。
参考文献
[1] 丁亚康, 翟润国, 井绪文. 基于ADAMS/INSIGHT的汽车悬架定位参数优化设计[J]. 汽车技术, 2011(5):4.
[2]侯健, 樊龙龙, 可学为. 基于ADAMS和Matlab的大口径舰炮发射系统动力学仿真[J]. 海军工程大学学报, 2009, 21(6):4.
[3]葛杨, 肖海燕, 舒海生,等. 新型舰炮供弹系统仿真设计研究[J]. 哈尔滨工程大学学报, 2005, 26(3):5.
[4]叶辛, 孙世岩, 谭波. 舰炮摆弹运动弹药振动的影响因素分析[J]. 四川兵工学报, 2019, 040(002):44-47.
[5]唐文献, 袁海波, 李虎. 基于ADAMS的某舰炮供弹系统仿真研究[J]. 江苏科技大学学报:自然科学版, 2010, 24(1):5.
[6]夏长高, 高晓辰. 基于ADAMS/car的双横臂悬架运动学和弹性运动学分析[J]. 机械设计与制造, 2010(7):3.
[7]于殿勇, 钱玉进. 基于ADAMS动力学仿真参数设置的研究[J]. 计算机仿真, 2006, 23(9):6.
[8]陈峰华. ADAMS 2012虚拟样机技术从入门到精通[M]. 清华大学出版社, 2013.
[9]李增刚. ADAMS入门详解与实例[M]. 国防工业出版社, 2014.
[1]

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



