(中国船舶集团公司第七一○研究所,湖北 宜昌 443003)
摘 要:针对目前线性建模解决舰船内外感应磁场推算问题时存在的困难,本文从非线性优化的角度出发,建立了内外磁场之间的误差反向传播神经网络预报模型,为了改善网络的固有缺陷,利用微粒群算法优化网络的初始权值与阈值,使其能够逃离局部最优点,增强了网络的鲁棒性。该方法避免了利用线性化方法存在的诸多困难,即可实现舰船内外磁场推算。并利用船模实验验证了网络预测的准确性,其换算精度相较于线性方法有所提高,满足工程实际需求。
关键词:舰船;磁场;闭环消磁;微粒群;误差反向传播
0 引言
近年来,闭环消磁技术成为各国消磁研究热点,相较于目前的消磁系统控制方法,它采取“测舰磁,消舰磁”原理,可以实现舰船磁场的实时补偿,是未来磁隐身技术发展的必然趋势。寻找一种根据舰船内部磁场测量值有效推算舰船外部某特定深度上磁场的方法成为实现闭环消磁技术的关键,也是闭环消磁技术亟待解决的问题之一。
国外对舰船内外感应磁场换算方法较早进行了研究,文献[1]利用积分方程法,建立了基于薄壳体内外换算的一种有效模型,解决了船壳内外感应磁场换算的问题,但其要求船壳的铁磁参数为已知,而工程中铁磁物体的磁导率是难以确定的。文献[2]提出了一种利用虚拟磁源法(Virtual source)建立舰船磁场内外换算的数学模型,但只进行了原理说明,没有具体的实验验证其换算精度。文献[3]在文献[2]的基础上,进行了理论上的改进,其主要原理是利用当前磁化状态下的舰船内部磁场与内部校准矢量(Onboard Calibration Vector) 计算得到比例系数(Scale Factor),将所得的比例系数与外部校准矢量(Offboard Calibration Vector)相乘,就可得到当前舰船外部磁场值。国内对闭环消磁技术的研究尚处于起步阶段,文献[4]在文献[3]的基础上,通过船模实验验证了基于变化量的校准矢量进行磁场推算的有效性。文献[5]从位置优化的角度出发,对薄钢板两侧磁场推算进行了研究,提高了薄钢板两侧磁场推算精度,但尚未涉及船模的内外磁场换算研究。上述文献大多是采用线性化方法解决内外换算问题,会面临复杂的磁性结构重构、网格剖分或复杂的重积分计算等问题,随着大型舰船的不断加入现役,将会加剧线性化处理的难度,影响其换算精度。近年来,非线性系统黑箱辨识问题成为国内外学者研究的前沿和重点问题,神经网络的飞速发展为非线性问题提供了一种有效的优化工具。而实际应用性最强的误差反向传播神经网络(Back Propagation,BP)神经网络由于其结构简单和学习能力强等优点,已经成功应用于钢铁、航空等领域。
本文从非线性优化的角度出发,建立了内外磁场之间的BP预报模型,针对网络的固有局限性,利用微粒群(Particle Swarm Optimization,PSO)算法优化网络的初始权值与阈值,使其能够逃离局部最优点,增强了网络的鲁棒性。该方法避免了利用线性化方法存在的诸多困难,即可实现舰船内外磁场的换算,相较于其他线性化方法其换算精度有所提高,并利用船模实验验证了所得网络的有效性和良好的泛化能力。
2 舰船磁场内外换算的神经网络模型
2.1 BP神经网络的基本模型
研究表明,当隐层节点的激活函数为Sigmoid函数时,3层前馈网络可以逼近任意的多元非线性函数[6],舰船内外感应磁场之间显然是一种非线性映射关系,因此选用只含有一层隐层的BP神经网络作为其非线性优化模型。如图1所示,即是一个典型的具有单隐层的BP网络,隐层的神经元传递函数tansig,输出层神经元传递函数purelin。利用舰船内部、外部磁场分别作为输入、输出样本集对其进行训练,同时对网络的连接权值和阈值进行学习和调整,使网络有效辨识内外磁场之间的非线性关系。其中网络的重要参数:如输入数R、隐层神经元数S1、输出层神经元数S2由内外磁场测量值的维数确定。但是由于基本BP算法存在依赖初始权值与阈值,极易陷入局部极小点的固有缺陷,本文采用一种PSO算法改进BP神经网络,充分利用PSO算法的全局搜索能力与BP算法的局部搜索能力,通过优化网络的初始权值与阈值,使其能够逃离局部最小点,增强了BP网络的鲁棒性。

图1 三层BP神经网络结构图
2.2 基本微粒群算法原理
PSO算法[7]首先在设计空间内随机初始化粒子群和每个粒子的初始速度;通过迭代搜索粒子适应度函数的最优解。在每一次迭代中,各个粒子根据自身找到的pbest与整个粒子群寻找的gbest来调整速度和方向,以更新粒子位置。第t+1代粒子在第t代粒子的基础上按照下面的公式进行调整:
![]() (1)
(1)
![]() (2)
(2)
当满足适应度函数的目标要求或达到最大迭代次数后,迭代过程结束,最后得到的pbest即所求的最佳位置,而
gbest为适应度函数的最佳值。
2.3 基于PSO算法改进BP神经网络
将微粒群算法与BP算法相结合,形成了一种新的混合优化算法PSO-BP[8~9],利用微粒群算法来优化BP网络的权值与阈值,使其能够逃离局部最小点,增强网络的鲁棒性。具体学习算法步骤为:
1)根据网络的输入、输出样本确定网络的重要参数,例如隐层神经元个数、输出层神经元个数、训练方法、最大训练次数等,建立网络的拓扑结构;
2)初始化粒子,确定种群数N,生成N个粒子群,将其映射为网络的N 组权值与阈值,随机产生N个初始速度,确定PSO算法的基本参数值,例如:惯性权重![]() 、加速因子与、目标精度Goal、适应度函数等;
、加速因子与、目标精度Goal、适应度函数等;
3)根据输入、输出样本,对输入的样本进行学习训练,计算出每个粒子适应度函数值,来评价每个粒子的适应度(即网络的均方误差),如果当前粒子的适应值![]() 与历史最好位置的适应度
与历史最好位置的适应度![]() 相比较,如果当前适应度更优,则用当前粒子的位置更新粒子历史最好位置;
相比较,如果当前适应度更优,则用当前粒子的位置更新粒子历史最好位置;
4)比较每个粒子的适应度与种群历史最佳位置,如果当前种群中的最佳适应值较好,则将其相应位置设置为新的种群历史最佳位置。如果尚未满足终止条件,则根据公式(1)、(2)来更新每个粒子的位置与飞行速度,返回步骤3);
如果达到精度要求或最大迭代次数,则返回种群最佳微粒的结果,保存当前的初始权值与阈值,输入测试样本,测试所建立网络的预测精度。
3 潜艇内外换算神经网络预报模型的有效性验证
3.1 基于改进神经网络的潜艇磁场内外换算实验设计
选取一两端封闭的空心圆筒作为潜艇模型(长2.002m,厚0.006m)如图2(a)所示,选用一可以自由推入推出圆筒的测量架,以便布设内部磁传感器,具体实物如图2(b)所示。将7个传感器等间距布设在测量架中心线位置,将其推入空心圆筒内部,用以测量潜艇模型内部磁场,并在模型正下方0.594m处,等间距布设7个传感器用以测量潜艇外部磁场,磁传感器具体布设如图3所示。


(a) (b)
图2 潜艇磁场内外换算的实物模型

图3 传感器布设示意图
3.2 PSO-BP网络基本参数的确定
3.2.1 BP网络基本参数的确定
将船模放置于某洞站模型内部,通过改变模型的航向角来模拟船模航行中感应磁场的变化。在得到12组(由于条件限制只得到12组数据)不同磁化状态下模型的内外感应磁场测量数据后,将其按顺序编号为1~12,选取其中11组内外测量数据作为A组(第1~11组),剩余的一组内外测量数据作为B组(第12组)。则BP神经网络的基本参数选取规则如下:
训练样本集:选取A组中的内部测量数据作为训练网络的学习样本,A组中的外部测量数据作为训练网络的期望输出;
测试样本集:选取B组中的内部测量数据作为测试网络训练效果的输入样本,B组中的外部测量数据作为网络的理想输出;
隐层神经元个数:BP神经网络的隐层节点数的选取至关重要,它影响着网络的训练速度、效果、泛化能力等。本文按照![]() 规则动态选取,其中R=7、S2=11,b为1~10之间的正整数,经过多次试验,选取隐层节点数为7时,网络的泛化性能最佳。
规则动态选取,其中R=7、S2=11,b为1~10之间的正整数,经过多次试验,选取隐层节点数为7时,网络的泛化性能最佳。
学习算法:本文选取Levenberg Marquardt (LM)算法作为学习算法,它是一种基于数值最优化理论的训练算法,其参数大多取缺省值即可。
3.2.2 PSO算法基本参数的确定
PSO算法中的很多参数取缺省值即可,种群数一般取20~40,本文取30。惯性权重![]() 、加速因子
、加速因子![]() 与
与![]() ,目标精度Goal=0.1,最大迭代次数为100,适应度函数取网络的均方根误差
,目标精度Goal=0.1,最大迭代次数为100,适应度函数取网络的均方根误差![]() ,其中t(p)、a(p)分别代表第p组网络的期望输出与实际的网络输出,q代表其维数。
,其中t(p)、a(p)分别代表第p组网络的期望输出与实际的网络输出,q代表其维数。
3.3 网络训练以及网络评价
基本参数设置完毕后,输入学习样本,按照PSO-BP的算法流程优化网络的初始权值与阈值,将最终得到的优化结果映射为网络的初始权值与阈值,训练网络,并输入剩余的内部测量数据来测试网络的预测精度,并将网络的预测值与外部磁场的实际测量值进行比较,如图4所示。本文选择相对均方根误差作为衡量预测精度的判定依据,其中相对均方根误差![]() 定义为:
定义为:![]() ,利用同样的样本多次训练,尽管每次的训练值都不同,这是由非线性问题的多解性决定的,但网络预报误差均控制在5%内,相较于文献[3]、[4]中误差控制在10%以内,精度有所提高,同时验证了利用PSO优化网络的初始权值与阈值后,网络已具备较好的稳定性。
,利用同样的样本多次训练,尽管每次的训练值都不同,这是由非线性问题的多解性决定的,但网络预报误差均控制在5%内,相较于文献[3]、[4]中误差控制在10%以内,精度有所提高,同时验证了利用PSO优化网络的初始权值与阈值后,网络已具备较好的稳定性。
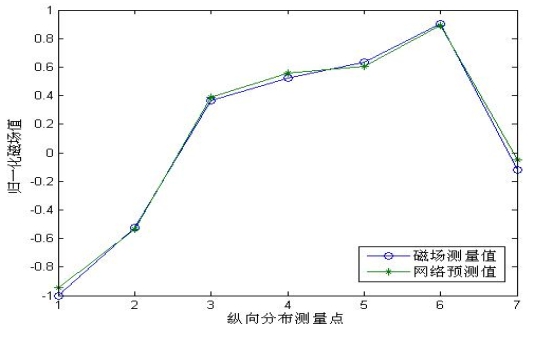
图4网络预测值与测量值比较图
4结束语
本文先从线性建模角度研究了舰船内外磁场之间的关系,利用线性化方法建模会存在复杂的磁性结构重构、剖分或复杂的重积分求解等问题,且随着舰船的大型化、复杂化、铁磁设备多样化均会加剧其线性近似的难度,进而影响换算精度。鉴于此,本文从非线性优化的角度出发,建立了内外磁场之间的BP神经网络预报模型,并通过PSO算法优化网络的初始权值与阈值,使其能够逃离局部最优点,增强了网络的稳定性,并通过设计的船模实验验证了网络预测的准确性,相较于其他线性方法,换算精度有所提高,符合工程实际需求。所存在的问题是如何进一步提高网络的收敛速度,来适应实际中感应磁场的快速改变,进而实施有效地磁性防护。
参考文献
[1]Oliver C, Jeanlouis C,Jeant B,et al. Recent improvements for solving inverse magneto static problem applied to thin shells[J]. IEEE Transactions and Magnetics,2002,38(2):1005-1008..
[2]Carl S. Closed-loop multi-sensor control system and method[P].US PATENT 5189590 Feb.23,1993.
[3]Richard M, Robert A. Ship degaussing system and algorithm[P].US PATENT 6965505 B1 Nov.15,2005.
[4]王鲸,刘胜道,苏广东. 一种潜艇内外磁场换算算法的实验验证[J]. 海军工程大学学报,2010
[5]连丽婷,肖昌汉,刘胜道等. 基于微粒群算法的薄钢板两侧磁场推算中的位置优化[J].上海交通大学学报,2010, 44 (7):0975-0979.
[6]董长虹. Matlab神经网络与应用[M].北京:国防工业出版社,2007:64-110
[7]KennedyJ, Eberhart RC.Particle Swarm Optimization [C]// Proceeding of the IEEE International Conference on Neural Network. Perth, Australia: 1995: 39-43
[8]WANG. Ping, HUANG Zhen-yi, ZHANG Ming-ya, and ZHAO Xue-wu. Mechanical property prediction of strip model based on PSO-BP Neural Network[J]. Journal of iron and steel research, 2007, 15(3):87-91.
[9]史东生,弟宇鸣,周春林. 粒子群优化算法在神经网络识别γ能谱中的应用[J].核技术,2007,30(7):615-619.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



