中国电建集团青海省电力设计院有限公司,青海省,西宁市,810000
摘要:本文以独山县某光伏电站工程为例,阐述了利用大疆Mavic3旋翼无人机在光伏电站1:2000地形图测量项目中的应用研究,形成外业影像获取、空三加密、DSM、DOM生产等一整套技术流程。三维测图方式采用EPS“三维测图”和“Cass10.0 For AutoCAD 2010 ”成图系统相结合模式进行高程点提取以及地物绘制等工作,并对空三精度和最终成图的精度进行检校,为利用无人机测绘辅助光伏扶贫项目建设方法进行了有益尝试。
关键词:网络RTK,仿地飞行,光伏电站 地形图
1.引言
近年来,随着测绘地理信息行业和无人机的快速发展,现今无人机具有轻便灵活、操作简单、勘测成本低等优势,是如今测绘行业获取大比例尺地形图的主要测量手段之一,无人机航空摄影测量技术以其超高的外业效率取代了传统的人工地形图测绘作业方式。本文以独山县某个光伏电站工程为例,采用大疆Mavic3旋翼无人机外业获取影像,内业进行数据成图等工作模式,在保证“4D”成果精度可靠性的同时提高了工作效率。
2.技术流程
本工程的作业流程主要分为无人机影像获取、影像数据预处理、空三加密、精度检查、成果输出、高程点及地物提取、成果提交。主要技术流程如图1所示:
图1 技术流程图
3.项目概况
本工程位于贵州省黔南布依族苗族自治州独山县基长镇境内,测区分为20个小斑测区,6个大斑块测区,实
际航测面积15km²,测区实际成图面积2.5km²,采用无人机航测方式进行1:2000地形图测绘作业。测区范围内地形起伏较大,最高点海拔1150m,最低点860m。测区地貌以侵蚀溶蚀构造形成的山地丘陵地貌为主,坡度一般为15~25°,草木茂盛,植被密集。
4.无人机数据采集
4.1设备投入
本工程选用大疆Mavic3旋翼无人机方式进行。大疆Mavic3旋翼无人机相对于固定翼无人机,具有:影像分辨率高、仿地飞行、起降灵活、安全性高、场地不受限等优势,且成图可用于三维模型立体测量等优点。
具体参数:相机型号----哈苏相机;传感器----4/3CMOS影像传感器;相幅尺寸----5280*3956;像素---2000万;相机焦距----24mm;飞行高度---180m
4.2飞行作业
在测区范围内选取相对较高的地点作为起降点,采用大疆Mavic 3网络RTK实时仿地飞行作业模式,飞行参数为:飞行航高相对地面高度180m,航向重叠度80%,旁向重叠度70%,飞行时间一架次25min,共计十个架次,1806幅影像,布设7个像控点作为平面及高程检查点,布设像控标靶并用GNSS RTK实测标靶平面坐标及高程,沿线采集约239个检查点。
5.影像处理
大疆Mavic3旋翼无人机空三处理采用的是大疆智图软件。首先将影像在网络RTK模式下获取的POS数据、相机参数等数据导入大疆制图软件,对影像进行初始纠正、特征点提取及空三计算,然后导入像控点进行空三优化,导出无畸变影像及空三成果,最后进行二维重建生成正射影像和数字高程模型。

图2影像及POS导入设置
6.三维测图
航测成果1:2000地形图制图采用EPS“三维测图”和“Cass10.0 For AutoCAD 2010 ”成图系统相结合模式进行地形图采集。利用影像成果在EPS和Cass10.0分别生成数字地表模型(DSM),在二维正射影像和三维模型下,进行道路、房屋等地物调绘。通过软件中高程点提取功能进行测区高程点提取,对于植被密集、边坡陡坎等,采用点选方式提取高程点,植被高度以现场实际高度进行统一加减高程,或者点选植被间隙部分采集碎步点,确保地形图等高线的准确性。
7.精度评价
7.1空三成果精度评价
使用7个像控点作为检查点,大疆Mavic3旋翼无人机在网络RTK仿地飞行模式下的空三进度报告如下表所示:
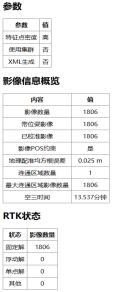
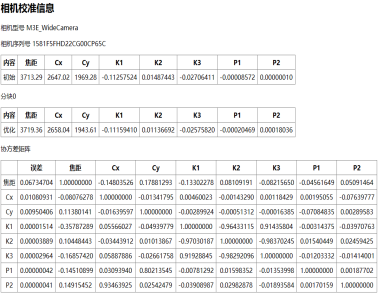
图3空三精度检查报告
可以看到7个像控点的最大点位误差为0.067m,测区地形均为丘陵,根据GBT 7930-2008 1:500 1:1000 1:2000地形图航空摄影测量内业规范:丘陵1:2000比例尺控制点点位中误差限差为 0.5m,本次航测成果空三报告精度均满足规范要求。
7.2 DSM成果评价
在航测作业之前,现场采用千寻网络RTK采集测区内道路、建筑物、陡坎等地物点及特征点239个,将RTK实地测量数据与DSM地区的高程点进行精度对比分析,所得结果如图所示:

图4野外实测和DSM高程点数据精度对比
根据GBT 7930-2008 1:500 1:1000 1:2000地形图航空摄影测量内业规范,数字高程模型的高程中误差计算公式为:
![]()
(1)式中---模型的高程中误差(m);----检查点个数;---实测高程点与DSM高程点的较差(m)。则大疆Mavic3旋翼无人机在网络RTK模式下的高程较差为:
![]() 0.214
0.214
(2)根据GBT 7930-2008 1:500 1:1000 1:2000地形图航空摄影测量内业规范,本工程测区地形均为丘陵,高程中误差限差为0.4m,本次DSM数字地表模型精度满足测量精度要求。
8.结束语
本文以贵州省黔南布依族苗族自治州独山县基长镇境内某光伏场区地形图测绘为例,根据测区的特性,运用大疆Mavic3旋翼无人机网络RTK仿地飞行模式作业,采用大疆智图软件进行空三处理,EPS“三维测图”和“Cass10.0 For AutoCAD 2010 ”成图系统相结合模式进行采集地形数据的作业方法进行了研究,得出一下结论:
(1)旋翼无人机航摄较常规航摄系统具有灵活性高和成本低的优势
(2)采用大疆Mavic3网络RTK实时仿地飞行的航测作业模式,能够在高差变化较大的丘陵地区,确保影像具有相同的地面分辨率,从而提高数据的一致性和准确性。
(3)通过仿地飞行简化了航线规划过程,有效的减少了数据采集时间。并且在陡峭的山区地形以及植被茂密地区精心DSM数字地表模型生成时,提升了三维重建的质量和效率,减少了重要细节的损失。
本文采用多技术手段处理成果数据的方法,在保证成果可靠性的同时提高了工作效率,但在植被覆盖密集和遮盖严重的区域,作业方法还需进一步改进。
参考文献
[1]张懂庆,汪志忠. 航空摄影单像空间后方交会在智慧矿山中的精度控制[J].世界有色金属,2019(21);180-183.
[2] 朱进,丁亚洲,陈攀杰等.控制点布设对无人机影像空三精度的影响[J].测绘科学,2016,41(5);116-120
[3] 郭世敏.基于无人机航摄影像的测图及三维建模研究[D].昆明:昆明理工大学,2017.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号