云南省烟草公司楚雄州公司 云南 楚雄 675000
摘要:针对楚雄州烟草公司卷烟物流仓储种类多、尺寸差异大、仓储配送物流器具复杂等自动化难题。本文通过对AGV在楚雄州烟草公司卷烟物流仓储中的应用案例研究,采用激光导引类高举升叉取式AGV,结合对配套的多穿库、多层式货架进行设计开发。在减少仓储作业人员,提升企业用工灵活性,改善经济效益,提升仓储自动化水平,提高仓储作业安全性,突破智慧商业建设瓶颈等方面成效明显。对烟草商业卷烟物流仓储分拣智能化应用具有一定的借鉴作用。
关键词:烟草;物流仓储;自动化;高举升叉取式AGV
引言
新一代信息技术与烟草行业的深度融合,正推动新的产业变革,形成新的经济方式、商业模式和形态的新质生产力。烟草行业以其商业链覆盖长、带动作用强,成为经济性较强的产业。烟草行业产销规模在经济发展具有特殊贡献,而且我国已经是烟草大国。以商业互联网、5G、商业机器人、加工中心等为代表的智能化、数字化技术在烟草行业加速应用,使得烟草行业产品线丰富、终端客户需求呈个性化特点,导致产品数量多、外形尺寸跨度大,为此物流环节(如仓储、配送等)的自动化、智能化、数字化也是烟草行业的重点难点。同时,细分市场年度需求具有较强的季节波动性,叠加烟草仓储、配送环节人员密集等特点,成为企业人员安排的难点。因此,推动烟草仓储、分拣、配送自动化、智能化和数字化改造,具有较强的现实需求。
1 AGV在烟草行业的应用情况
1.1 不同技术路线AGV优劣势
仓储、配送生产物流逐步经历了机械化、自动化、智能化阶段。其中机械化阶段,主要是以叉车、输送车、堆垛机、升降机等机械设备逐步替代人工;自动化阶段主要是以自动导向车(Automated Guided Vehicle, AGV)、自动货架、自动存取机器人、自动识别分拣等自动化物流系统应用为特点;智能化阶段,主要是充分利用射频识别(Radio Frequency Identification,RFID)、机器人、AGV、智能机器控制系统(Robot Control System, RCS)、仓库管理系统(Warehouse Management System, WMS),同时与执行系统(Manufacturing Execution System, MES)、供应链管理系统(Supply Chain Management, SCM)等制造、供应链管理系统对接,实现智慧物流与生产系统的有效融合。AGV作为物料配送的自动化搬运装卸设备,因其可在线充电、作业高效等优势在行业内获得广泛应用。
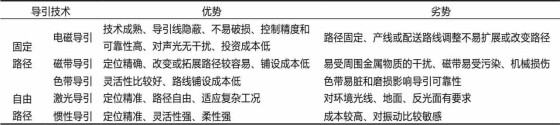
AGV按照其导引技术的差异,分为“固定路径导引”和“自由路径导引”两类[1]。其中固定路径导引就是AGV通过电磁、磁带、色带、激光等导引技术沿固定的物理路线行驶;自由路径导引则是AGV通过激光导航、惯性导航等方式自动选择预设的逻辑路线行驶。电磁导引主要是在AGV行驶路线上埋设金属线,并在金属线上加载电流,通过AGV上的电磁感应线圈来感应磁场的强弱实现路线识别和跟踪;磁带导引是在AGV行驶路线上安装磁带,通过AGV上的磁性传感器检测信号确定车辆的行驶路线;色带导引是在AGV的行驶路径上喷涂漆或黏贴色带,通过AGV自带的摄像头采集色带图像并进行信号处理实现导引;激光导引是在AGV行驶路线安装高反光性的激光反射板作为激光定位标志,AGV上的激光扫描器发射激光同时采集反射回来的激光并进行信号处理实现定位和导航;惯性导引是在AGV上安装陀螺仪,在行驶区域地面安装定位块,AGV通过对陀螺仪偏差信号计算及地面定位块信号采集确定自己的位置和导航(见表1)。
表1 不同技术路线AGV优劣势
1.2 AGV在烟草行业的应用情况
2015年以来,AGV在烟草行业的生产[2]、分装[3]、生产配送[4-6]等环节逐步被应用。传统的烟草工艺都采用板链、拖链作业。随着我国政策法规变化加快、烟草技术升级、市场需求多元化,传统的板链、拖链对烟草企业产品变化的柔性化显得不足。重型AGV的应用逐步增多,根据行业公开信息,2016年投产的中华轻型高柔性总装二线采用的就是AGV装配线;2021年12月投入的智能装配线采用的是双车联动AGV,发动机与小车可自动对接,可根据装配工人的身高调节发动机的装配高度等,采用的是AGV自动化输送。
2 楚雄州烟草公司AGV仓储物流应用研究
2.1 楚雄州烟草公司仓储物流组织架构
系统总体架构共分为操作系统层、驱动层、硬件抽象层、中间件层、接口层和公共模块层共6层。其中,操作系统层(OS):操作系统层是整个程序的最底层,程序能够在WinCE、Linux操作系统上运行。驱动层(Drives):驱动层是直接驱动硬件工作的代码层,它的作用是实现设备的驱动程序并为上层程序提供硬件设备的操作接口。目前驱动层主要包括Can控制器驱动、RS-232串口驱动和RS-485串口驱动。硬件抽象层(HAL):硬件抽象层是基于驱动层对硬件设备的虚拟封装,提供具有硬件设备功能的虚拟接口供上层调用。本系统硬件抽象层主要包括设备抽象和操作系统抽象2类,其中设备抽象包括陀螺仪、伺服驱动器、IO、网络、电源、二维码和磁道传感器;操作系统抽象(OS)主要是操作系统之间存在部分系统API不同,针对这部分系统API单独封装的抽象接口。中间件层(MID):中间件是整个系统的业务逻辑层,由各独立又相互关联的模块组成,它们分别是通信管理、任务管理、车辆管理、导引、消息队列管理、导航、操作管理、控制管理、监控管理、数据管理、手操器、地图管理。接口层(Interface):该层用于提供车载系统的功能给其他系统调用,调用方式可以是本地调用、进程间调用或网络通信调用。公共模块层(Common):该层包含日志和参数管理2个模块,他们负责的功能均会被系统各层模块使用到。AGV车载系统总体架如图1所示。

图1 楚雄州烟草公司AGV车载系统总体架构
2.2 基于AGV的仓储流程优化
楚雄州烟草公司AGV上线,调用、搬运、成品入库、出库、盘点等流程采用多种控制模式。大致来说分为3种,分别是”手动控制AGV行走”、”让AGV自动行走到目的地”和”通过调度系统控制AGV行走”,根据仓库不同的应用场景,应用不同的模式,实现件烟的取料、搬运、入库、出库等自动化运行。
1)手动控制AGV行走:即通过手操器、键盘或远程控制管理系统界面单独遥控AGV的行走或操作。该模式主要用于出库量较少的小品类件烟的出库,通过人工控制的方式,AGV快速反应,短时间内快速补货,满足小品类件烟集中快速出库的需求。
2)让AGV自动行走到目的地:通过指令方法给AGV车载系统发送一个目标点,AGV自身能够计算路径并沿计算好的路径行走到目标点。该模式主要应用于仓库储位的调整,人为下达搬运任务,AGV从指定储位将整托件烟移动到目标储位,进行小规模的物料移动,起到优化仓库布局的作用。
3)通过调度系统控制AGV行走:AGV行走的路径完全由调度系统负责提供,AGV根据调度系统提供的路径行走。该模式是AGV的主要作业模式,该模式完全不需要人工干预,效率最高。广泛应用在出库、入库当中,通过上位系统发送的任务信息,自动调用4台AGV进行最优路径作业,自主完成仓库当天所有的出库、入库任务。这种作业模式是实现黑灯仓库的基础。
上述说明的AGV存在3种工作方式,并且这3种工作方式是相互独立的不能共存,因此AGV车载系统就会存在3种工作模式,分别是手动模式、本地模式和上位模式。
2.3 自动化仓储AGV选型
系统梳理AGV搬运需求。搬运需求主要包含两类,一是件烟在库房的取料地点、产品在卷烟仓库的存放地点、需要该物料的分拣线的分拣量、需要该物料的分拣线的单件生产循环时间、单个搬运包装内的数量等,通过这些物料、分拣线信息确定AGV搬运节拍;二是物料包装信息,包括空托盘外形尺寸、负载后的整托盘质量、负载后整托盘外形尺寸等,通过物料包装信息确定AGV承载力需求,以及通道、卸料点空间尺寸等。
表1 AGV选型基本参数
总体要求 | 适应现有仓库作业环境,满足物料承重和提升要求,实现三层货架整托盘件烟上架和下架 | |
满足入库要求 | ≥800件/小时(27托盘/小时) | |
满足出库需求 | ≥600件/小时(20托盘/小时) | |
设计规范 | 满足AGV规范、烟草行业相关规范、标准等相关国家规范 | |
系统总体要求 | 监控系统、报警系统、可操作性软件界面 | |
系统对接 | 与现阶段使用的智慧物流平台和施耐德PLC电控系统对接 | |
效率满足 | ≥20000条/小时 | |
行走方式 | 前进、后退、转弯 | |
叉齿宽度 | 空载托盘参考尺寸:L:1250mm×W:1000mm×H:150mm | |
搬运货物质量(Kg) | ≥800(当载具满载即30件/托盘,举升到5m时) | |
提升方式(液压或电动) | 液压提升 | |
提升高度(mm) | ≥5000 | |
上坡坡度 | ≥10度 | |
一次充电作业时长 | ≥6h | |
作业模式 | 具备自动模式和手动模式两种模式 | |
运行巷道宽度(mm) | ≤3000 | |
车体地隙高度(mm) | 75 | |
通讯方式 | 无线通讯(中标方布设) | |
安全总体要求 | 电气安全保护、机械安全保护 | |
稳定性 | 提升及行走过程中,载具上有货物时不能发生货物掉落 | |
安全装置 | 激光障碍物探测 | 具有 |
机械触碰式 | 具有 | |
急停开关 | 具有 | |
其他装置 | 指示灯,声光报警装置 | |
充电器 | 提供充电器选型、位置设置的具体方案及维保 | |
电池续航能力 | 单次充满电,满载工作时长≥6小时 | |
电池参数 | 电池类型 | 锂电池 |
充电方式 | 自动充电 | |
2.4 AGV自动化搬运需求测算
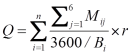 (1)
(1)
式中,Q为企业需要的AGV数量;i为企业总计有n项需要采用AGV搬运成品,i=1,2,3,…,n;Bi为企业第i种采用AGV搬运成品的搬运节拍,托/时;Mij为搬运第i种成品AGV单循环作业总时间中第j种作业所需的时间,s;j=1,2,3,4,5,6,分别为AGV单循环行走时间、转弯时间、升降时间、交通避让时间、空箱/满箱物料交换时间、充电时间(有专门的充电桩进行自动充电,充电过程中不能工作)等六种时间的合计;r为AGV冗余系数。
2.5 AGV空托盘自动回收的实现
基于AGV视觉导航(图像识别导引)的应用,在入库口加装ccd摄像机采集空托盘回收区域地面信息,采用图像处理和分析的方式来获取托盘回收信息,通过彩色图像灰度化、图像滤波、二值化、形态学修正对视频图像进行预处理,排除受到环境限制以及加入的随机干扰的冗余信息,提高可识别性,然后进行阈值分割,再对图像信息进行识别与跟踪,将图像信号转化为数字信号。图像系统对这些信号进行各种运算来抽取目标的特征,进而判别是否需要回收空托盘,自动控制AGV进行空托盘的回收。
2.6 AGV的自动行走导航算法
目前较为常见的导航方式有视觉导航和激光导航两种,视觉导航包括通过二维码之类的标志物、或者视觉定位与地图构建技术实现两类,灵活性较好,成本较低。但视觉导航的定位精度较低,且对光干扰较为敏感,且只能应用在对叉车举升高度要求较低的场景中。楚雄州烟草公司选用了激光导航的方式,虽然激光导航成本高,但定位精度也高,行驶路径可灵活改变,并可在无光环境下运行。结合楚雄州烟草公司卷烟仓库需要高举升作业的需求,形成了楚雄州烟草公司特色的高举升叉取式AGV应用。
针对卷烟仓库等室内结构化环境,在AGV叉车的工作范围内按一定原则布设一定数量的反光柱,并利用全站仪测量每一个反光柱相对全局坐标系的坐标。将激光雷达安装于AGV叉车顶部,通过设置合适的阈值对数据进行预处理,过滤非反光柱反射的激光雷达点云数据。再基于密度的有噪声空间聚类算法,对激光雷达点云数据进行聚类得到点云聚类中心。之后,利用快速迭代最近点算法将其与原有地图中的反光柱位置进行匹配,从而获得点云数据的刚体变换矩阵。重新对点云聚类中心进行匹配,最终取得AGV叉车的定位结果。如图2所示。用比例积分控制的方式,对直线运动路径跟踪误差和圆弧运动路径跟踪误差进行计算,实现AGV叉车路径跟踪控制。
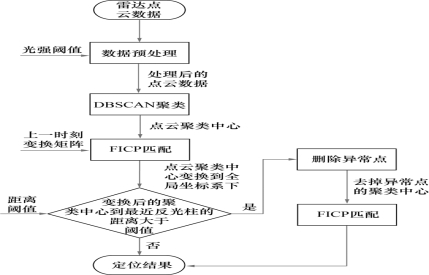
图2 AGV叉车定位算法流程
3 效果验证
经过两年时间的验证,楚雄州烟草公司高举升叉取式AGV应用效果主要体现在以下几方面:
1)提高分拣配送效率,企业降本增效成效显著。通过投入高举升叉取式AGV及配套多穿库等,减少2台柴油叉车、减少人员4人,预计每年减少相关费用45万元。考虑叉车维修保养及电能消耗与AGV消耗相抵,相关投入通过年度节省费用可在3.5 年后收回相应的投资。使用AGV作业对节约企业的管理成本也起到了明显的效用,例如摒弃了传统的特种设备作业证。
2)提升仓储环节自动化水平,突破智慧商业建设瓶颈。楚雄州烟草公司在商业物流环节基本实现计算机数字控制化。劳动密集型的仓储环节一直是企业推进智慧仓库建设的瓶颈,通过高举升叉取式AGV应用,有效实现商业物流仓储环节与企业MES、SCM、WMS等相关系统融合,系统提升楚雄州烟草公司自动化水平。
3)提高仓库作业安全性,AGV在减轻工人作业强度的基础上,本身采取多级硬件、软件的安全措施,例如:急停按钮、避障雷达、防撞触边等等,为工人、物料、作业环境提供了极大的安全保障。
4 结语
总之,在如今智能商业大背景下,行业的竞争日趋激烈,同时随着国人生活水平的提升,人工成本逐年增加,要想在行业中竞争的大潮中屹立不倒,必须以高品质、低成本、高效率赢得先机。智能转型及变革是关键。本项目的为烟草行业提供了最佳实践,解决了商业仓储物流的痛点,使信息更加的透明化、柔性化,从而提升了物流分拣、配送的效率及管理能力,进而增加了市场竞争力。
参考文献:
[1] 闵四宗,祖基龙,刘家昶.自动导向AGV开发技术综述与展望[J].烟草工艺师,2022(9):34-36.
[2] 郭宝喜.采用AGV的烟草混线合装工艺技术[J].商业技术创新,2022,9(6):23-27.
[3] 刘品言,张川,赵剑,等.AGV在烟草生产线上的应用[J].电镀与涂饰,2022,41(20):1489-1492.
[4] 董雷,李海南,李想,等.基于智能AGV的烟草系统开发及应用测试[J].时代烟草,2022(21):136-138.
[5] 郭世超,张利平,唐秋华,等.智能装配车间的AGV物流仿真与优化[J].机床与液压,2022,50(9):163- 168.
[6] 游百勇.烟草仓库生产物料流AGV路径优化研究[J].中国物流与采购,2022(2):62-63.
![]()

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



