中国水利水电第五工程局有限公司 四川成都 610000
摘 要:随着我国城市轨道交通的发展,常用的道岔已不能完全满足运营需求。42号减振道岔作为大号码道岔,对岔区减振要求及平顺度要求提高,导致道岔运输及铺设难度大,精度难以控制。为解决42号减振道岔施工技术难题,首先建立了吊装过程检算模型,并进行监测实验,最后完成吊装后的平直度检测。结果表明,在该吊装方案下,道岔组件最大应力远小于屈服强度,最大位移符合施工要求。道岔吊装监测位移数据与仿真位移结果基本一致。吊装结束后,道岔组件在直向过岔方向,轨面的高低不平顺最值处于接头夹板位置,其余位置处都小于1mm,符合道岔(直向)静态铺设平顺度允许偏差。在侧向过岔方向,轨面的高低不平顺绝对值的最大值为4mm,处于轮载位置,轨面高低不平顺略大于道岔(直向)静态铺设平顺度允许偏差。
关键词:大号码道岔;城市轨道交通;有限元;振动监测;平直度;
1引言
随着我国城市轨道交通的发展,列车运行速度逐渐提高,过去城市轨道交通中常采用的9号、12号、18号道岔[1]已不能完全满足运营需求。成都轨道交通19号线二期工程设计速度160km/h,为保证列车越行过站不降低速度,首次在国内地铁上使用了42#特殊减振单开道岔。
42号高速减振道岔由于各部件尺寸加大加长,岔区减振要求及平顺度要求提高,导致道岔运输及铺设难度大,精度难以控制。为解决42号高速减振道岔施工技术难题,相关学者进行了大量的研究。苏兴[2]结合达成铁路新建双线段施工,总结了客运专线有砟42号单开道岔施工工艺;敬永峰[3]通过精细化控制保证铺设质量,归纳了严寒地区42号客专道岔铺设的施工质量控制点;丰成林[4]改进了道岔铺装时长大杆件吊装及工装设备,通过轨检车动态检测说明42号高速道岔原位铺装技术可行;刘伟[5]理论检算了在12‰坡道上铺设42号道岔的结构安全性,指出可在山区高速铁路上铺设大号码道岔。S苏[6]采用原位铺设的方法,并总结出了一套完整的客运专线有砟42号单开道岔施工技术和工艺。从上述研究可知,关于42号道岔的施工研究还仅停留在高速铁路上,且研究方向主要集中在施工步骤及工艺上,对于施工过程中道岔变形的检测监测的研究较少。
为此,针对城市轨道交通中铺设42#特殊减振单开道岔施工关键技术问题进行研究,为保证道岔平面线型、轮轨关系、道岔区轨道刚度符合设计要求,基于有限元理论对道岔吊装方案进行检算,并试验监测吊装过程中道岔的变形情况,铺设完成后采用测量小车检测道岔静态铺设平整度。研究结果可为42#特殊减振单开道岔在城市轨道交通应用提供一定的理论基础及工程经验。

图1 大号码高速无砟道岔
2基于有限元模型的42#特殊减振道岔吊装方案检算
42#特殊减振单开道岔作为一种长大异形轨件,吊装过程尤为重要,是施工过程中一个关键环节。由于跨度大、构件复杂,因此42#特殊减振道岔在吊装前需要进行受力分析,找出最不利位置,确定其在道岔组件吊装过程中是否会超过应力、变形及位移的限值,如若超过,可采用必要的措施,保证施工的安全。
根据吊装过程的三个典型阶段,基于有限元软件ANSYS,采用梁单元模拟尖轨、辙叉、导轨,在重力的作用下对三个典型阶段道岔组件的应力、变形和位移进行分析。
2.1 模型概况
如图2展示,应用ANSYS所建立的工况一方案下的三维有限元模型。模拟了吊装过程中吊点的布置,吊点位置处的捆绑方式,精确刻画了不同部位的连接特性。将汽车吊简化为固定约束直接加在定滑轮位置处,同时在吊点位置处吊绳与托梁采用铰接方式连接。尖轨组件为曲基本轨和直尖轨,其捆绑方式如图2所示。建模中考虑了尖轨组件,吊绳,捆绑槽钢,托梁,同时在新增吊点位置时,考虑了的龙门架的几何尺寸。建模过程中,为了消除尖轨组件和槽钢硬接触的影响,考虑了柔性胶垫进行接触,并用螺栓将上下槽钢连接。

图2 有限元模型示意图
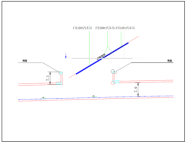
2.2 第一阶段
第一阶段吊车指挥人员指挥吊车缓慢起钩,动作应匀速均匀,起吊过程中保持道岔设备基本水平,吊运道岔导、护轨组件横移约11m至吊出井上方,吊装示意图如图3(a)所示。在吊装第一阶段,设备水平吊装过程中尖轨组件受力计算结果及变形计算结果如图3(b)、图3(c)所示。由图(b)可以看出,当尖轨组件在吊装第一阶段,设备基本保持水平过程中,尖轨组件每隔一定长度受力较大,但整体受力相对均衡,最大等效应力出现在托梁端部位置处,最大等效应力为51.9MPa,远小于钢轨的屈服强度值510Mpa,根据规范得到U75V钢轨极限强度510Mpa,因此在吊装第一阶段,符合检算要求。
由图(c)可以看出当尖轨组件在吊装第一阶段,设备基本保持水平过程中,尖轨组件在每个一定距离与吊钩连接位置处均出现向上的位移,最大向上位移为3.5mm,在尖轨两端出现向下的位移,最大向下位移为7.93cm,最大位移在尖轨跟端处,符合后续施工要求。
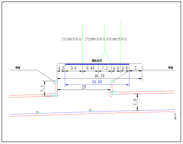
2.3 第二阶段
第二阶段2号200T吊车吊绳保持不动,3号130T吊车上台,上台高度约6m,吊绳向2号吊车方向摆臂约2m,1号130T吊车下降,下降约4m,吊绳向2号200T号吊车方向摆臂约0.6m;目的使道岔组件达到倾斜状态以方便道岔下井,倾斜后钢轨两端高差约25m,倾斜角度为31°,该过程中吊车主钩与钢丝绳采用定滑轮连接,钢丝绳的长度随钢轨组件倾斜程度能机动变化,吊装如图4所示。在吊装第二阶段,道岔调整为倾斜状态过程中尖轨组件应力及位移计算结果如图3.6所示。由图4(b)得出以下结论:当尖轨组件在吊装第二阶段,尖轨组件调整为倾斜状态,尖轨组件每隔一定长度受力较大,但整体受力相对均衡,最大等效应力出现在托梁端部位置处,最大等效应力为51.9MPa,根据规范得到U75V钢轨极限强度510MPa,因此在工况二条件下,符合检算要求。
由图(c)得出以下结论:当尖轨组件在吊装第二阶段,尖轨组件调整为倾斜状态,尖轨组件在每个一定距离与吊钩连接位置处均出现向上的位移,最大向上位移为3.25mm,在尖轨两端出现向下的位移,最大向下位移为7.59cm,最大位移在尖轨跟端处,符合后续施工要求。
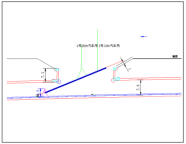
2.4 第三阶段
3台吊车同时下降,并向1号QAY130T吊车方横向摆臂,至1号130T吊车钢丝绳距离挡墙边缘1m位置时终止,同时缓慢下降3、2、1吊车至钢轨上端离边坡1m,并往1号吊车缓慢摆臂,待1号130T吊车钢丝绳距离挡墙边缘1m时停止操作。在道岔组件最底端距离轨面约1m时停止吊装,在托梁下端新增一个龙门架吊点,当龙门架受力后,1#吊车下降的同时摘除1号130T吊车吊绳。吊装如图6所示。在吊装第三阶段,吊装井边缘新增一个吊点,新增吊点采用龙门架方式,此时尖轨组件应力及位移计算结果如图5所示。
由图5(b)得出以下结论:当尖轨组件在吊装第三阶段,在吊装井边缘新增一个吊点,新增吊点采用龙门架方式,尖轨组件每隔一定长度受力较大,但整体受力相对均衡,最大等效应力出现在托梁端部位置处,最大等效应力为54.7MPa。根据规范得到U75V钢轨极限强度510MPa,因此在工况三条件下,尖轨组件最大应力 54.7MPa,符合检算要求。
由图c得出以下结论:当吊装尖轨组件时,龙门架最大应力出现在龙门架底部位置处,最大应力为0.689MPa,小于屈服强度,检算满足要求。由于已知截面面积,对应力进行换算可得,龙门架所受最大荷载为3.01吨。
由图5(c)得出以下结论:当尖轨组件在在吊装第三阶段,在吊装井边缘新增一个吊点,新增吊点采用龙门架方式,尖轨组件在每隔一定距离与吊钩连接位置处均出现向上的位移,最大向上位移为3.5mm,在尖轨两端出现向下的位移,最大向下位移为7.18cm,位于尖轨跟端处,符合后续施工要求


(a)吊装第一阶段示意图 | (b)等效应力云图 | (c)位移变形云图 |
图3尖轨组件第一阶段计算结果云图


(a)吊装第二阶段示意图 | (b)等效应力云图 | (c)位移变形云图 |
图4尖轨组件第二阶段计算结果云图


(a)吊装第三阶段示意图 | (b)等效应力云图 | (c)位移变形云图 |

(d)龙门吊应力云图
图5龙门架第三阶段计算结果云图
3 道岔吊装监测
为研究42#减振道岔吊装过程中的变形问题,在已有仿真结果的基础上,设计出如图6所示。其中试验装置由高精度接触式加速度传感器,高精度信息采集仪,连接线和信息处理系统等构成。

图6 42#减振道岔监测试验示意图
3.1 监测步骤
(1)在吊绳固定前,为了方便后期数据处理,在道岔轨件选取合适的测量点并记录,如图7(a)所示。
(2)在已确定测量点放置传感器,选取测点2附近放置数据采集仪,并固定住数据采集仪,防止产生由于采集仪松动导致的噪声,如图8(b)所示。
(3)如图c所示,工作人员调试采集软件,确定采样频率,确保3个监测点都有良好的振动信号反馈。
(4)在吊装结束后,将采集仪及传感器拆除,通过分析软件将采集数据保存并进行处理分析。



(a)测点现场布置 | (b)采集仪固定 | (c)软件调试 |
图7 42#减振道岔监测现场图


(a)导、护轨吊装监测方案 | (b)尖轨吊装监测方案 |
图8传感器测点布置示意图
3.2 监测结果分析
导、护轨上三个测点位置的垂向振动加速度信号,如图9所示,对于道岔组件端部位置的传感器,即1#与3#传感器,测得其振动加速度幅值较大,最大值大于0.04g,而跨中位置的振动加速度幅值较小,约为5×10-4g。各测点之间的相对位移如图10所示,由图可知,测点1-2之间的相对变形最大为0.23 m;测点2-3之间的相对变形最大为0.2m。



(a)1#位置振动加速度 | (b)2#位置振动加速度 | (c)3#位置振动加速度 |
图9导、护轨振动加速度测试数据


图10导轨组件监测点相对位移
4 42号道岔平直度监测
为研究42#减振道岔吊装过程中的变形问题,在已有监测结果的基础上,采用基于一弦N点弦测法的测量小车测量42#减振道岔的静态铺设平顺度。小车整体结构由小车载体、里程计、位移传感器、数据采集卡、上位机系统与电源几个部分构成。测量小车可实现同时对双轨顶面的连续测量,使用方便且便于运输;由测量仪上安装的各种传感器采集数据并上传存储,通过滤波以及数学模型分析计算展现被测钢轨不平顺状态的实际情况;对钢轨顶面不平顺波长、幅值、周期性等进行分析和统计,其结果以波形图形式展现,为钢轨打磨参数设置及钢轨铣磨修理质量分析评估等工务养护作业起参考作用。
4.1测量工况
4.1.1直向过岔
沿着直向过岔方向将轨检小车放置在钢轨表面,从直尖轨尖端区段处开始测量。为了保证测量结果的精确性,测量过程中尽量保持匀速慢行,防止遇到接头夹板,导致轨检小车振动剧烈,如图11所示。
4.1.2侧向过岔
在侧向过岔方向,轨距在不断变化,因此需要人为控制左右两侧传感器的位置。同时由于轮载过渡处无法测量,因此需要人为将两侧的传感器过渡到心轨位置处,保证测量结果的连续性与准确性,如图12所示。


(a)直向过岔方向测量示意图 | (b)直向过岔方向测量现场图 |
图11直向过岔方向测量


(a)侧向过岔方向测量示意图 | (b)侧向过岔方向测量现场图 |
图12侧向过岔方向测量
4.2结果分析
直向过岔时轨检小车所测结果如图13所示。由图13所示,在直向过岔方向,左轨轨面的高低不平顺绝对值的最大值为2.3mm,右轨轨面的高低不平顺绝对值的最大值为1.5mm,但最值处都处于接头夹板位置,如图所示,其余位置处都小于1mm,符合道岔(直向)静态铺设平顺度允许偏差。侧向过岔时轨检小车所测结果如图14所示,由图14所示,在侧向过岔方向,左轨轨面的高低不平顺绝对值的最大值为3mm,右轨轨面的高低不平顺绝对值的最大值为4mm,最值处都处于轮载位置,是由于人为搬动导致幅值波动,如图所示。在侧向过岔方向,轨面高低不平顺略大于道岔(直向)静态铺设平顺度允许偏差。


图13直向过岔方向实测数据


图14直向过岔方向实测数据
5 结论
针对42#减振道岔吊装问题,基于有限元理论,建立了42#减振道岔吊装有限元计算模型,计算了尖轨组件和导轨组件在吊装过程中的等效应力和位移变形;监测了道岔吊装过程中导轨和尖轨的变形;测量了道岔铺设后的平直度。主要结论如下:
(1)对于道岔吊装过程检算,通过分析可知,三种工况下,尖轨组件最大等效应力可达54.7MPa,最大等效应力出现在托梁端部位置处,应力最大值远小于钢轨屈服强度510MPa。在工况一条件下,尖轨组件达到最大位移7.93cm,符合施工要求。在工况三条件下,龙门架所受最大荷载为4.32吨,符合施工要求。对于导轨组件吊装方案,通过分析可知,三种工况下,导轨组件最大等效应力可达88.5MPa,最大等效应力出现在托梁端部位置处,应力最大值小于钢轨屈服强度510MPa。在工况一条件下,导轨组件达到最大位移19cm,符合施工要求。在工况三条件下,龙门架所受最大荷载为3.01吨,符合施工要求。
(2)对于道岔吊装过程监测,通过分析可知,道岔导、护轨两端测点位置的位移值较大,其最大值位移绝对值为0.23 m,跨中位置测点位置值较小,其绝对值约为4×10-4m。导、护轨组件测点1-2之间的相对位移最大值为0.23m;测点2-3之间的相对位移最大值为0.2m;尖轨两端测点位置的位移值较大,其最大值位移绝对值为0.11 m,跨中位置测点位置值较小,其绝对值约为9.8×10-3 m。尖轨组件测点1-2之间的相对位移最大值为0.08 m;测点2-3之间的相对位移最大值为0.1m。
(3)对于道岔轨顶面平直度测量,通过分析可知,在直向过岔方向,左轨轨面的高低不平顺绝对值的最大值为2.3mm,右轨轨面的高低不平顺绝对值的最大值为1.5mm,但最值处都处于接头夹板位置,如图所示,其余位置处都小于1mm,符合道岔(直向)静态铺设平顺度允许偏差。在侧向过岔方向,左轨轨面的高低不平顺绝对值的最大值为3mm,右轨轨面的高低不平顺绝对值的最大值为4mm,处于轮载位置,由于人为搬动导致幅值波动。在侧向过岔方向,轨面高低不平顺略大于道岔(直向)静态铺设平顺度允许偏差。
参考文献
[1]王树国,司道林,葛 晶,等. 中国和欧洲高速铁路道岔标准体系及内容分析[J]. 铁道技术监督,2014,42(5):2-5.
[2]苏兴.42号单开有砟道岔铺设施工技术[J].铁道建筑,2010(06):114-118.
[3]敬永锋,张先军.哈大铁路客运专线42号无砟高速道岔铺设质量控制[J].铁道标准设计,2012(05):71-74.DOI:10.13238/j.issn.1004-2954.2012.05.020.
[4]丰成林.沪宁城际高铁国产42号无砟道岔原位铺设技术研究[J].铁道建筑,2012(02):90-93.
[5]刘伟,刘春明.12‰坡道上铺设42号道岔的理论研究与工程应用[J].铁道工程学报,2020,37(10):37-42.
[6]苏兴.42号单开有砟道岔铺设施工技术[J].铁道建筑,2010(06):114-118.
作者简介
杨文民(1994-),男,四川成都人,中国水电五局第二分局,项目总工,高级工程师,学士,现从事轨道施工建设与技术管理工作。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



