中国民用航空华东地区空中交通管理局 技术保障中心
摘 要:当今时代,机器学习和人工智能的概念已经逐渐走入了各行各业,利用大数据带来的数据积累,引领各行各业发生改革性的变化。空管自动化系统作为提供空中交通管制服务的全天候运行系统,目前依旧需要大量的管制员实时监控并进行大量复杂重复的指挥操作,而随着航班量的逐年持续增长,管制员压力的增长带来安全隐患也随之而来。利用浅层的机器学习算法学习管制员的历史操作数据构建逻辑模型,可以辅助管制员减少一些对周期性航班的重复指挥操作,减轻管制压力的同时提高管制的指挥效率,有利于未来实现真正的空管指挥自动化。
关键词:机器学习;人工智能;自动化;大数据;
1、机器学习
1.1浅层机器学习概述
机器学习是一个很宽泛的概念,任何的简化和替代人工操作的逻辑规则都可以认为是一种机器学习,浅层机器学习是一种基于统计模型从而得出逻辑规则的算法模型,这种基于统计的机器学习算法比过去基于人工规则的系统更有优越性:不需要事先设定逻辑规则,只需关注数据的特征和先验知识,就可以从数据中抽象出简单但主要的逻辑规则。浅层机器学习算法可以归类为回归算法、聚类算法、分类算法,主流的代表算法有: K-MEANS聚类算法、D-Tree决策树算法等。从管制员指挥操作的过程来说,主要涉及的是聚类算法和分类算法。
1.2 K-MEANS聚类算法概述
聚类是将数据集中相似的数据进行分类组织的过程,被称为无监督学习。K-MEANS是最著名的聚类算法之一。算法基本概念:随机选取K个数据作为初始中心,然后计算其他数据与其的距离,把每个数据分配给距离最近的中心,将计算出的均值作为新的中心再重新分配每个数据,迭代计算,直到中心位置收敛后终止。优点是速度快,逻辑简单;缺点是有概率陷入局部最优,且需要事先确定K值(分割数量)。为弥补缺点,可以使用改进版的二分K-MEANS算法,区别是对于离散度过高的类进行二分分割后进行聚类,比较分割后的离散总值与未分割的离散值决定分割是否终止,可以用于航班高度发生改变位置的聚类。
1.3 C4.5决策树分类算法概述
决策树分类算法最早的使用是ID3算法,以信息熵和信息增益度为衡量标准,每个树节点的分割以最高信息增益进行特征选择,直到生成完美的分割决策树。但是ID3算法会去选择子类别多、离散度高的特征,这就导致了模型过度拟合,所以在此基础上,C4.5算法诞生,区别是将衡量标准从信息增益转变为信息增益率,避免了离散度高的特征优选的问题,可以用于管制指令高度操作中给与机组发送指令高度的过程。
2、选取和构建逻辑模型
2.1 管制指令高度操作概述
飞机在航路飞行过程中,飞行模型是一个由上升到平飞到下降的过程,但是上升和下降的过程中并不是连续的,而是参杂短时平飞的,当管制员需要指挥飞机改变高度(上升或者下降)时,管制员会在空管自动化系统的显示界面中对该飞机修改指令高度,并在地空通信的语音中告知机组上升或下降到指令高度,这就是指令高度操作。飞机在飞行过程中只能飞行在对应的高度上,所以指令高度基本都是固定值,但是每个管制员发出指令的时间和习惯不一样,所以机组改变高度的地理位置有差异。
2.2 构建逻辑模型
针对管制员的指令高度操作,抽取一年内不同航班的历史数据构建逻辑模型。先通过二分K-MEANS算法将指令高度数据进行聚类分析,构建类别模型,其中每个类别代表修改指令高度的地理区域,形成飞机一次飞行中修改高度的区域集合;再通过C4.5算法,根据类别数据、起飞机场、落地机场和指令高度构建决策树;最后根据飞机的飞行位置和决策树,判断在哪个位置系统应该给飞机发送什么指令高度。
3、验证逻辑模型
以航班YZR7969为例,抽取2019年全年的YZR7969的指令高度数据,总数据量134条,清洗筛选和整理最后有效数据为120条,其起飞行路线分两段,从ZSAM起飞到ZSHC,再从ZSHC到ZHCC。
3.1 K-MEANS算法分析
将YZR7969的经纬度和指令高度三项数据录入算法脚本进行聚类,聚类后的情况如表3-1-1所示:
中心点 | 系统内纬度 | 系统内经度 | 归属点个数 | 平均指令高度(m) |
A点 | 3038.166667 | 12003.6667 | 6 | 7200 |
B点 | 2738.75 | 11939 | 4 | 6900 |
C点 | 2734 | 11938.77143 | 35 | 6300 |
D点 | 2525.5 | 11855 | 2 | 8100 |
E点 | 2839 | 11929 | 20 | 7800 |
F点 | 2715.62069 | 11938.86207 | 29 | 7500 |
G点 | 3038.272727 | 12001.7 | 22 | 6600 |
H点 | 3129 | 11831.5 | 2 | 8300 |
表3-1-1 聚类中心点表
从表中可以看出,经过算法二分K-MEANS算法聚类运算,根据“手肘法”选出的最佳聚类点个数为8个,其中D,H两个点归属点个数过少属于特异值应该舍去,在算法模型中可以通过设置最小过滤门限处理,避免影响C4.5决策树的学习,给出错误的指令。
3.2 C4.5算法分析
将聚类算法的结果连同起飞机场、落地机场、归属中心点、和平均指令高度四项数据录入C4.5算法脚本中进行模型构建,得到的结果如图3-2-1所示:
图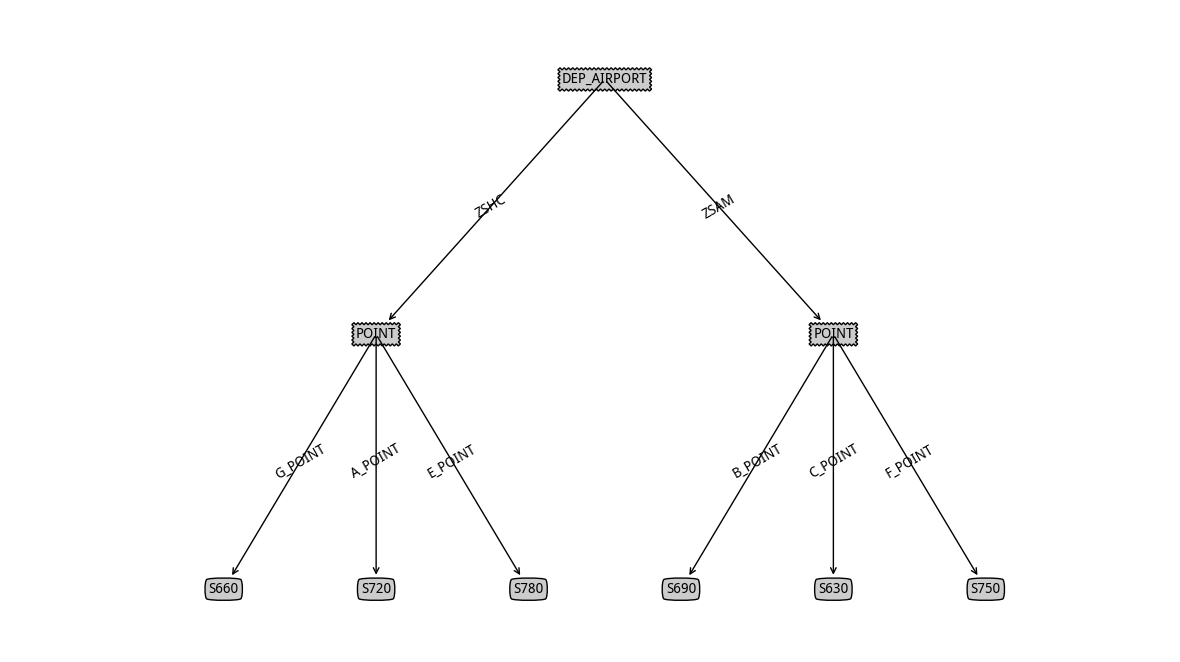 3-2-1 决策树模型图
3-2-1 决策树模型图
如上图所示,构建的决策树模型先根据起飞机场做出逻辑选择,再根据不同的位置点给出不同的高度指令,其中G,A,E点为从ZSHC到ZHCC航路上的指令高度修改点,B,C,F点为从ZSAM起飞到ZSHC航路上的指令高度修改点。当判断飞机当前位置在某个点的半径范围内,模型就可以给出对应的指令高度。
3.3 模型更新
随着管制的指挥数据的不断累积,可以设置固定周期进行学习,每次学习重新构建模型,保证模型发出指令的精确率。
4、结论
上述的模型基本已经实现,不过还有优化和研究的地方,比如使用回归类的预测学习算法是否可以直接做到一部到位?深度学习算法是否可以构建更大更完整的学习模型?机器学习未来在空管领域还有很多的应用空间值得我们研究和探索。
参考文献:
[1]百度百科——K均值聚类算法
[2]百度百科——C4.5算法
[3]“欧洲猫-X”系统管制操作手册

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



