中煤科工集团北京华宇工程有限公司 北京 100120
摘要:无轨胶轮车作为矿井辅助运输设备,因其灵活性高、适应性强等优点,被广泛应用于井下运输。随着智能化矿山的建设,对无轨胶轮车的运行提出了更高的要求。现阶段胶轮车工作,仍需驾驶员进行操作,井下工作环境错综复杂、可见度不如地面,突发状况时有发生;驾驶员反应不及时或操作失误,容易发生碰撞,造成安全事故。本文将模糊控制算法应用到无轨胶轮车避碰系统中,进行可行性研究。
关键词:井下;无轨胶轮车;安全;模糊控制;避碰
概述
随着科学技术的发展,我国煤炭开采技术也在突飞猛进,开采深度在不断加大。近年来,无轨胶轮车的自动化技术在不断发展:信号采集系统、显示系统等对车辆进行实时监控,显示车辆的各项运行参数。现有系统是对无轨胶轮车本身性能进行操控监视,仍需驾驶员进行现场操控。巷道间的交岔联络巷较多、行驶路面不平整、巷道照度低等原因,可能造成碰撞事故的发生,本文通过设置合理的模糊控制规则,对无轨胶轮车的驱动轮速度进行控制,改变方向角,从而躲避碰撞,增加井下运输安全性。
控制系统结构
本文控制系统由:超声波传感器、A/D转换模块、模糊控制器、D/A转换模块、伺服电机构成。
将无轨胶轮车作为一个两轴四轮的研究对象,同轴的两个前轮作为导向轮,只起到改变运动方向的作用;同轴的两个后轮作为驱动轮,分别安装一个直流伺服电机为胶轮车提供动力。在胶轮车前端安装三个超声波传感器,分别安置于车头的正中间和左、右两边缘侧,超声波传感器的单个监测相位角为60°,前方三个超声波传感器构成180°平角,实现运行前端监测全覆盖,通过接收前方物体反射回来的超声波,依据信号的强弱及波长的不同,通过分析时间差,可得出前方物体的性质及其与车本身的距离。由于超声波探测不依据井下照度,即使在全黑的工作环境中,仍然能够进行测距功能,因此超声波传感器适合应用于煤矿井下的测距。超声波传感器发出的信号在空气中传播的速度为340m/s,井下防爆无轨胶轮车的前进挡一般为1挡:2.5m/s、2挡:4.2m/s、3挡:7.4m/s;设胶轮车与障碍物的最小距离为5m时发生动作,其响应时间分别为0.0292s、0.029s、0.0288s。从发现障碍物到作出响应的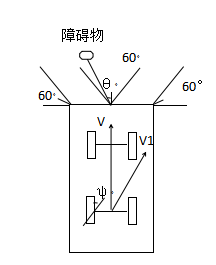 时间来看,都是及其迅速的,最大限度的避免事故的发生。运动模型构建如图1:
时间来看,都是及其迅速的,最大限度的避免事故的发生。运动模型构建如图1:
图1:运动模型构建
当胶轮车在行驶过程中,检测到前方有障碍物时,先进行初步判断,是哪个超声波传感器检测到的,再分别调整驱动轮的转速,行成偏移角,达到成功躲避障碍物的功能。以机头中央传感器为例,当其检测在60°角平分线的左侧θ°有障碍物时,做出预判断车身向右偏移为最优,对应的左轮的驱动速度要大于右轮的驱动速度,其偏转角度ψ要大于前方障碍物相对车前行的夹角θ,其对应的公式如下:
其中V是胶轮车匀速行驶的速度,V1是胶轮车偏移方向的速度,θ为障碍物与胶轮车中间安置超声波传感器的方位角,x为胶轮车偏移的水平分量,y为胶轮车偏移的垂直分量,ψ为胶轮车偏移的角度,w为胶轮车的宽度,L为胶轮车的长度,t是胶轮车碰到障碍物的时间。
模糊化控制
胶轮车避碰系统的核心元件为超声波传感器、伺服驱动电机以及单片机处理器。因设备与行驶环境的差异性,无轨胶轮车系统为非线性复杂系统,精准的数学模型很难建立,不能做到点对点的精确处理。为了解决环境与设备的差异性问题,本文引入模糊逻辑控制器,其优点:控制灵活,在时变与非线性的控制系统中能够自行根据隶属度的不同,做出对应的动作,在一定的范围域内进行判别与动作,解决了数学模型精确化的难题,从而达到躲避障碍物的功能。
对胶轮车避碰系统进行模糊化定义:模糊控制器的输入量为置于车前方的超声波传感器检测到障碍物的距离与角度。将车到障碍物的距离进行模糊化定义,子集取近(near)、中(med)、远(far);将车的运行方向与障碍物间的夹角模糊化定义,子集取正(P)、零(ZERO)、负(N);将车的左、右后置驱动轮的速度进行模糊化定义,子集取慢速(slow)、中速(med)、快速(fast)[1]。各参数可自行定义,本文定义0~5m为近(near)、2.5~7.5m为中(med)、5~10m为远(far);定义逆时针旋转,将-30°~30°等效为对应的数值。逆时针角度为正0~1.5为正(P)、-0.5~0.5为零(ZERO)、顺时针角度为负0~-1.5为负(N);定义0~10m/s为慢速(slow)、6~14m/s为中速(med)、10~20m/s为快速(fast)。
糊规则显示为:当左端超声波传感器检测到障碍物的距离的隶属度为7,正前方超声波传感器检测到障碍物的距离隶属度为1.2,右端超声波传感器检测到障碍物的距离隶属度为9.2;方位角隶属度为0.062;根据方位角可以判断出障碍物在胶轮车运行方向的偏左侧,而根据左、右超声波传感器距离障碍物的距离来看,最优方案应是偏右运行;而对应的输出量:左轮速度为15.8;右轮速度为10。此车确实是为右相行驶。
四、模糊控制器的避碰系统进行仿真
图2为仿真连线系统框图[2]。
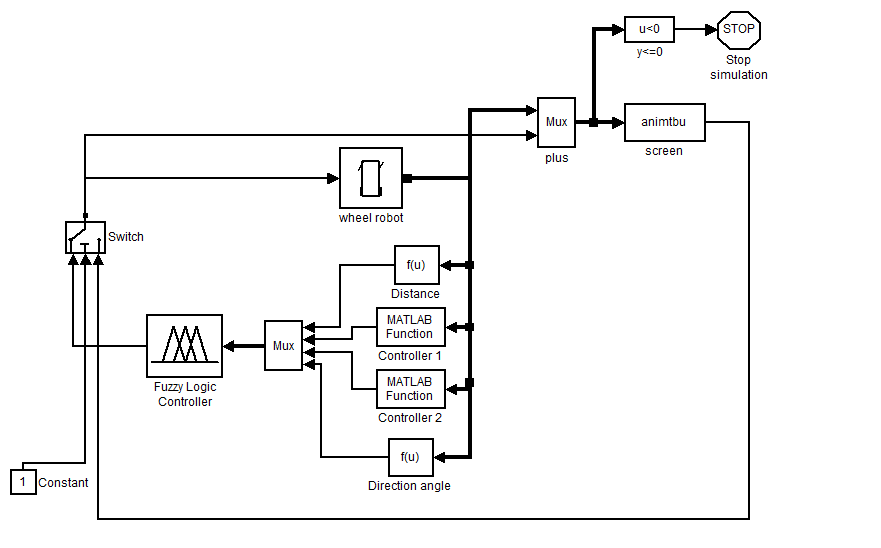
图2: 仿真连线系统框图
该系统的核心部分为:模糊逻辑控制器,此控制器针对接收到的障碍物距离和夹角信号后作出对应的判断,通过输出左、右驱动轮不同的速度,达到改变运行方向,避免碰撞的功能,其隶属度划分的越细致,作出对应的判断越准确[3]。
六、结论
本文将模糊控制器搭建至无轨胶轮车避碰系统中,针对输入量:障碍物距离与障碍物方位角;输出量:左、右驱动轮的不同转速;划分的隶属度均为3,稍显不足,但是通过matlab仿真与校验,确实能够实现避碰系统的要求。如果隶属度划分的更为细致,避碰效果可能更加灵敏、准确。随着智能化矿山的建设,对自动化系统的要求也会越来越高,基于模糊化控制原理的无轨胶轮车避碰系统,为将来无人化无轨胶轮车驾驶提供了一种新思路,这既是一种挑战又是一种新的机遇。
[1]袁曾任.在动态环境中移动机器人导航和避碰的一种新方法[J].ROBOT, 2000, 22(2):83-86
[2]张荣立, 何国伟, 李铎, 等.采矿工程设计手册[M].北京:煤炭工业出版社,2003.
[3]石辛民.模糊控制及其matlab仿真[M], 清华大学出版社,2008, 167-208

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2025 期刊网(www.qikanchina.com) 琼ICP备2021005105号



