(1.湖北工业大学工程技术学院 机械工程系 湖北 430000)
摘要:昆虫和鸟类都具有高超的飞行技巧。通过对动物的身体构造、运动机理和行为方式的观察研究,将把工程系统的研究设计与仿生学相结合,进行仿生机器的开发与研究。借助空气动力学软件xflow对了翼型进行分析选型,最终得到NACA6409翼型,将此翼型作为扑翼机异=翼型,针对动力结构,采取双曲柄摇杆机构驱动扑翼机内翼,平行四边形机构驱动扑翼机外翼,而传动结构采取三级斜齿轮减速,以保证提供更大的扭矩。
关键词:xflow 双曲柄摇杆机构; 三级斜齿轮减速 ;NACA64
1.引言
根据飞行原理的不同,飞行器可分为固定翼飞行器、旋翼飞行器和扑翼飞行器三种类别中。固定翼飞行器主要应用于客运和货运飞机,飞机依靠燃料来提供推力和升力,可以实现快速飞行、高负荷运载以及长途飞行,但缺点是无法实现低速飞行和悬停,并且对飞行环境要求也较高。设计一款小型扑翼飞行器应用于现实社会具有越来越重要的社会现实意义。
2.整体设计思路
扑翼飞行器是在仿生的基础上发展而来的,我们结合鸟类和昆虫等的飞行原理研究的基础上得出了扑翼飞行的一些基本特点进行设计。
(1)通过扑翼系统在有规律地扑动翅膀时提供飞行时所需的推力和升力,以及飞行时滚转、偏航和俯仰力矩[1];
(2)通过改变与调整扑动的参数——扑动的频率、幅度和翅膀迎角等[2]。快速有效地改变身体的飞行状态,从而具备较强的机动性和灵活性;
(3)在飞行的任意时刻,鸟类可以将翅膀锁定在某一固定位置,从而在高空中利用重力势能以进行滑翔,这样使得鸟类可以在几不用耗费太多能量的情况下进行长距离的飞行;
(4)利用扑翼运动获得多种高升力机理从而有效利用周围环境中的气流[3],使扑翼产生升力和推力的效率得到提高,保证其在只需消耗很少能量的条件下进行很长距离的飞行。
3.空气动力学分析
3.1翼型选择
利用 Profili V2 在生成了20段翼型,经过不断测试选用型号为 NACA6409 的凹凸型翼型。此翼型的理论升阻比高且重量轻,经过试验其适用于扑翼飞行器的飞行。

图1-1 翼型设计流程图
并在机翼骨架上做出通孔和凹槽,方便精准装配翅翼杆件、减轻样机的重量[4]。

图1-2 NACA6409翼型分析图
内翼位置:![]() 内翼姿态:
内翼姿态:
外翼位置:
外翼姿态:
3.2迎角分析
以NACA6409翼型为模型,探讨机翼初始迎角对气动特性影响。以地面坐标系为基准,将机翼未开始运动,处于平放状态下具有的迎角设定为初始迎角。通常情况采用无量纲数升力系数![]() ,阻力
,阻力![]() 系数衡量飞行器运动中受到的升力及阻力。选取初始迎角变化范围在-10到12之间,雷诺数Re设定为18449 。
系数衡量飞行器运动中受到的升力及阻力。选取初始迎角变化范围在-10到12之间,雷诺数Re设定为18449 。
将设计出的翼型模型导入到XFLOW 软件中对翼型气动特性进行分析以及仿真模拟。当扑翼机初始迎角为5°左右时,获得最大升阻比,最终选取5°为初始迎角。
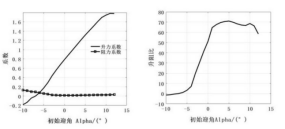
图1-3 初始迎角
3.3展弦比分析
通过不同的展弦比的机翼,在实验条件为气流速度为5m/s,机翼初始迎角为5°进行XFlow分析,选取仿真时间6s。通过静载荷压强分布情况对比得出结构相对稳定得展弦比为3。对于扑翼飞行器等多耦合影响参数的仿真实验,利用XFlow 参数化设计,对于扑翼飞行器系统设计具有重要特性进行仿真实验。在仿真运动周期内,扑翼飞行器机翼的平均升力系数与平均推力系数随翼展变化如图3-4所示。

图1-4 平均升力系数与平均推力系数随翼展变化
4.机械结构设计
4.1尾翼设计
大型鸟类飞行时并不能像昆虫一般可以灵活的控制翅膀,需要借助尾翼的辅助作用来平衡身体[5]。因此,尾翼机构对扑翼样机飞行期间的力矩平衡状态有着非常大的影响,本项目的尾翼机构只有两个自由度,分别使用两个舵机来控制上下翻转和左右翻转。
4.2减速器设计
仿生翅翼能够做上下扑动运动,其动力主要来自于电机的转动。通过实验发现电机的转速通常远高于翅翼的扑动频率,为了保证翅翼的扑动频率与电机的转速相互匹配,需设计出合适的减速机构。机构采用三级减速,以适应较大的减速比,为进一步降低齿轮的震动我们将直齿轮改为斜齿轮,使得齿轮轴向受力阻碍齿轮震动[7]。
齿轮采用三级斜齿轮减速器,每一级减速比为47/12,总的减速比为60。同时斜齿轮减速提供轴向力,在一定程度上抑制了齿轮的振动。
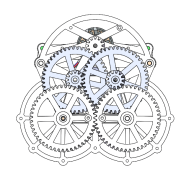
图1-5三级减速器模型图
为了使无刷电机能够达到最大功率,在实际测试中我们发现:机身不连接翅膀负载的情况下,无刷电机很难达到最大功率。在其公率超过一定阀值时,其齿轮上过盈配合的轴承外圈会因齿轮的震动从而脱离连接。为了解决此问题我们采取了创新式轴承与齿轮的固定。
为了达到轴承能够承受住齿轮震动的效果,我们采取双轴承夹齿轮的策略不仅使得轴承能够承受齿轮的震动并且在轴向上产生了阻碍使得齿轮震动使其明显下降。
4.3扑动结构设计
设计中将曲柄固定在齿轮上,与齿轮一起转动,摇杆通过连接夹板与机架相连,内翼杆与外翼杆通过铰链连接,并引入辅助杆和外翼杆相铰接,以实现扑动机构的主动展向折曲运动[9],具体结构如图 4-5所示。
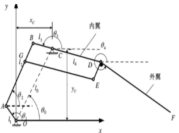
图1-6 扑动结构示意图
对内翼机构利用利用matlab 将下方程组输入用fsolve进行求解:

若![]() (或
(或![]() ),
),![]() 已知时,由上述方程组解出
已知时,由上述方程组解出![]() 及
及![]()
5.试验样机

6.结论
通过试验和调试该仿扑翼飞行器装置,样机表明,该仿生扑翼飞行器具备基本的飞行功能,该方案可行。
参考文献
[1]姜森, 郝永平, 李伦,等. 基于空间连杆机构实现"8"字形运动的扑翼机的设计[J]. 机床与液压, 2019, 47(13):5.
[2]郭梦辉. 仿生扑翼飞行器结构设计及气动特性研究[D]. 沈阳理工大学.
[3]张亚锋, 宋文萍, 宋笔锋,等. 扑翼机翼气动力和惯性力对翼杆结构变形研究[J]. 航空动力学报, 2010(7):6.
[4] Shuxin W , Guoping C , Jianhu Z , et al. The Development and Test on Wing Type of A Bionic Flying Micro-robot仿生扑翼飞行机器人翅型的研制与实验研究[J]. 实验力学, 2006, 21(3):315-321.
[5]王超, 屈方杰, 黄恒敬,等. 多自由度仿生扑翼飞行机器人结构设计与分析[J]. 宇航总体技术, 2020(1):9.
[6]潘尔振. 机器海鸥的仿生设计及其实验研究[D]. 哈尔滨工业大学.
[7]葛文杰, 莫小娟, 沈垚磊,等. 仿海鸥扑翼机构:, CN109693788A[P]. 2019.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



