中车唐山机车车辆有限公司
摘要:动车组在正线运行时因黏着降低出现滑行,施加紧急制动停车后,04 车3,4 轴的5,6,7,8 位轮对踏面出现不同程度擦伤。文章详细分析了轮对擦伤的原因并实现了故障复现,确定轮对擦伤原因为车组在持续严重滑行时,04 车制动系统仅能实现1 次持续排风功能,使本架参考速度无法正常恢复到车组速度,导致防滑功效降低。针对上述问题,提出改善车组在严重滑行时的持续排风功能和缩短电制动切除时间的解决方案,并通过了试验验证。
关键词:动车组;轮对擦伤;制动力分配;电制动;空气制动
一、故障现象
动车组的制动力分配设计理念是充分利用电制动,减少闸片磨耗。在电制动能力满足列车制动力需求的情况下,优先使用电制动(分配在01 车与04 车上),电制动不足时在各架平均补充空气制动。该动车组当日运行在株洲—株洲南区间时,区间下坡道为25.6‰,坡道长度约895 m,且雾水气较大,上述因素导致轮轨黏着较低。车组运行在此区间时,轮对出现空转,之后施加制动。车组优先施加电制动,动车由于承担了较大的制动力出现了滑行。当电制动出现严重滑行后,切除了电制动,由空气制动接管,但由于轨面黏着不足,空气制动仍然出现滑行,且由于04 车防滑功能未正确动作,最终导致04 车3,4轴轮对擦伤。
二、原理分析
2.1 制动力管理
车组正常运行时,采用电制动与空气制动实时协调配合,电制动优先,空气制动延时投入,电制动不足时在各架平均补充空气制动的混合制动方式,即按等磨耗原则进行混合制动[1]。如果动车电制动失效,根据剩余的牵引系统制动能力,失效的制动力首先由剩余的牵引系统补充。如果还需要制动力,由制动控制模块(BCU)施加空气制动,以补足列车所需的总制动力和电制动力的差值,不足的制动力平均分配在所有车辆上,同时考虑黏着系数限制。
2.2 整车防滑控制原理
防滑系统由控制单元和速度传感器组成。控制单元计算本车速度传感器采集的轴速度、参考速度、轴减速度,根据各轴减速度,各轴速度与参考速度之间的速度差来判断滑行状态。当轮轨间黏着条件较差轮对产生滑行时,控制单元立即控制电空阀动作,调节制动力以抑制滑行,防止轮对擦伤,并充分利用黏着以缩短不利黏着条件下的制动距离。
1)减速度准则防滑控制。
如果本架任何轴减速度信号超出预定基准值时,控制单元将减小滑行轴上的空气制动力。如果该滑行轴减速度恢复时,控制单元将恢复滑行轴上的空气制
动力。
2)速度差准则防滑控制。
如果轴速度与车辆速度间的速度差超过预定的基准值,控制单元将减小滑行轴上的空气制动力。当黏着恢复时,控制单元将恢复滑行轴上的空气制动力。制动系统统一管理电制动防滑和空气制动防滑。复合制动工况下,控制单元检测到电制动滑行时,将向牵引控制单元(TCU)发送电制动滑行部分减少或全部减少信号,TCU 收到电制动滑行减少信号后卸载对应电制动力。
三、故障原因分析
3.1 制动系统数据分析
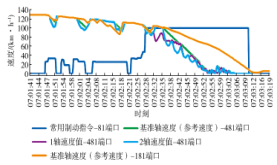
该城际动车组制动控制模块采用架控模式,具体由制动网关控制单元和制动控制单元组成。为查明车组轮对擦伤的原因,对轮对擦伤时的G 阀和S 阀滑行数据进行分析。从图1 和图2 可以看出,在07:02:28 车组触发全常用制动之后,对比01 车181 端口的基准轴速度,04 车G 阀在滑行过程中轴速度快速下降,在07:02:55 时轴速度几乎降为零,之后有较低速度恢复;S 阀在滑行过程中轴速度快速下降,在07:02:52 时轴速度降为零,之后一直到停车轴速度始终保持为零,出现轴抱死。进一步分析在07:02:28 时车组触发常用最大制动直至停车过程中防滑系统的动作,04 车G阀和S 阀的4 轴由于黏着条件太差,均出现了严重滑行。依据上文参考速度计算方法第3 条,04 车各架应分别排空本架其中1 根轴的制动缸压力,使该轴速度恢复到车组运行速度,进而将参考速度重新调整至车组运行速度。而从图1 和图2中可以看出,04 车仅在07:02:30 时实现了1次2轴持续排风3s功能,之后2轴持续排风3 s 功能不再触发,本架参考速度一直严重偏离车组速度,防滑功效降低。由于撒砂装置在4 车1 轴,轮轨黏着条件有所改善,04车G阀轴速度在07:02:55—07:03:05 期间有所恢复。此外,轴速度恢复后也会触发防滑功能,进一步抑制滑行,最终04 车G 阀的1, 2 轴1, 2, 3, 4 位车轮未出现擦伤。而04 车S 阀从07:02:52 至停车,轴速度一直保持为零,两根轴都抱死,且持续将近20 s,导致轮对擦伤。通过分析认为:由于当前制动软件的使能脉冲信号须在防滑激活信号结束后才复位,导致在持续防滑过程中,2轴持续排风3s功能不能再次触发,造成本架参考速度不能恢复到车组运行速度。

四、解决措施
通过上述数据分析和试验台故障复现,对该城际动车组轮对擦伤采取以下优化措施。
1)将持续排风3s功能的使能信号设置为在持续排风3s之后复位,保证在防滑持续激活过程中该功能可多次实现。通过该措施,可确保严重滑行时,参考速度计算值能够快速恢复至列车实际速度,解决因参考速度计算不准而导致的轮对擦伤情况。
2)BCU检测到电制动滑行时,缩短电制动切除时间,由空气制动接管整列车制动需求。电制动与空气制动模式下,全列车优先分配全列电制动力,在制动级位较小的情况下,全列车制动力由01、04两节动车承担;而在纯空气制动模式下,全列四节车空气制动为平均分配模式,动车的制动黏着力需求变小,滑行纠正相对更容易实现。
五、结束语
针对动车组轮对擦伤问题,本文从原理入手,对该动车组制动力管理方法、制动防滑控制原理和本架参考速度的计算等方面进行了详细介绍。在此基础上,结合车辆运行数据,分析了导致轮对擦伤的原因,并通过试验台模拟复现了故障现象。目前,该城际动车组已按上述方案对制动系统软件进行了适应性优化,并通过了正线运营考核,提高了低黏着情况下的车组适应性,有效降低了轮对擦伤的概率。针对轮对擦伤的问题,后期将从黏着特性入手,搭建仿真试验平台,从原理上进一步深入解决轮对擦伤的问题。
参考文献:
[1] 罗智迅,罗 超,陈 林. 城轨车辆架控制动系统通信故障控制策略设计分析[J]. 电力机车与城轨车辆,2020,43(3):18-22.
[2] 段继超,胡跃文. 深圳地铁1 号线续建工程车辆制动管理模式[J].城市轨道交通研究,2009,12(11):77-81.
[3] 高 珊,梁建全,陈 磊,等. 动车组防滑策略优化[J]. 铁道车辆,2021,59(1):110-112.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



