上海东海海洋工程勘察设计研究院有限公司
摘要:传统的人工巡检方式的在复杂的自然环境中效率低下,工作条件艰苦,当发生突发电网故障或异常天气时检修人员巡检不便,存在较大风险,不能完全满足现代化电网建设和发展的要求。本论文突破了传统巡线方式的限制,分析了机载激光LiDAR在电力巡检中的应用,并成功地验证了将其应用于电力巡检中所带来的好处,使得其能够在电网巡检中获取全面、准确的电网线路信息,实现了传输线路安全巡检,且能够对电路中出现的问题进行更加准确的定位和判断。
关键词:机载激光LiDAR;电网巡检;点云数据分析
引言
近年来,随着激光雷达技术和无人机技术的日益发展与成熟应用,激光雷达LiDAR作为一种激光探测和距离检测系统,它可以获得全面完整的电路信息,还可以满足在电力巡检中获得空间几何结构信息的需要[1],并且还具有高精度,高自动化,高效率,精确定位等特点。本文将机载激光LiDAR技术应用到输电线路巡检工作中,对其在电网维护应用中所使用的关键技术进行了详细的论述,并对机载激光LiDAR在电力巡检中得到的数据展开分析,最后得出结论:机载激光LiDAR技术可以实现电力线路的安全检测,能够提高了电网巡检的效率,降低了巡检的成本,从整体上提升了电网运维水平[2]。
1机载LiDAR系统技术指标
机载LiDAR是一种融合了激光测距、GNSS、IMU惯性导航等多种探测手段的新型机载LiDAR系统,它是一种利用飞行平台来探测目标的姿态、位置以及反射光强的方法。LiDAR系统是一种综合了GPS、INS和激光等多项技术的机载激光雷达系统,它具有分辨率高、探测性能高、抗干扰能力强等优点[3-4]。
2LiDAR数据获取与处理
2.1飞行方案设立
为确保激光雷达LiDAR数据获得的相对精确性,在数据采集过程中,使用了一种航向平面扫描飞行模式,调整好无人机平台状态后,开启LiDAR数据采集系统,待完成参数设置后,按照规定的航迹进行飞行,并进行数据采集。本次研究设计的飞行方案为:对某地区110kV输电线进行了一次巡视测试,测试航高为200米,宽度为400米,速度为100公里/小时,在仿地飞行巡检时,平均点密度为38点,整个航程为113公里,雷达扫射线路径长度为52公里。
2.2LiDAR数据获取
机载LiDAR系统获取的线路通道点云中含有多类目标,如电力线路的杆塔、所连接的变电站、架空线路等,还有处于电网通道环境中的电力线、建筑物、道路、植被、湖泊等。LiDAR数据与地面目标直接相关,脚点的分布能够直接反映出目标的实际立体形态,从而能够更快速地提取出目标的空间信息。点云数据表现为一种离散的分布,即点与点之间的关系。
2.3LiDAR数据点云分类
在通过数据预处理获取原始激光雷达LiDAR点云数据后,需要对其进行初始化,然后再对其传输线扫描数据进行分析,对激光雷达点云进行分类等。
首先,根据已知的线路方位和方向,对机载激光雷达获取的点云数据进行切割,得到线路通道内的点云。在此基础上,将原始点云数据中的地物点,如地面点,导线点,杆塔点,植被点,建筑物点等进行数据分析和应用。利用点云分类软件的自动提取算法,利用数据并行的方法,可以迅速地进行分段数据的提取。与此同时,数据分类与后续的数据分析的准确性有着显著的相关性,所以对自动化分类准确度的要求就是要达到较高的分类精度。图1中具体描述了点云数据分类的流程。
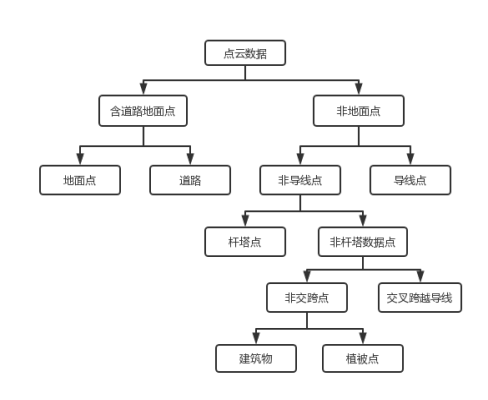
图1点云数据自动分类流程图
3LiDAR数据分析与应用
3.1安全距离分析
电力线的安全间距计算,就是利用一种自动的算法,测量出一条电力线和它周围的其他地物的间距,并将这个间距和安全间距进行对比,把小于这个间距的地物点标注出来,从而达到自动预警的目的,以便电力部门的维护工作人员能够在第一时间对这些地物进行清除,确保输电线路稳定运行[5]。在检测传输线路的危险点时,应当以输电线路为轴线,以安全距离为半径的类圆柱体范围内,判断是否存在植被、建筑物等物,若存在,则将其标注为危险点。
本文介绍了一种用虚拟格网求输电线路安全间距的方法,算法步骤如图2所示。
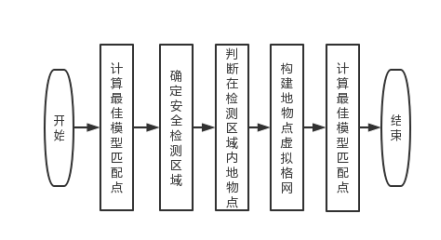
图2安全距离计算步骤
算法的具体步骤为:
(1)找出最优的模式配合点。在已建立的电力线模型的基础上,求解出了新的电力线坐标,从而得到了最优的电力线匹配点。
(2)明确安全测试范围。用直线将采集到的两个电塔中心平面坐标连接起来,在垂直直线的两个方向上拓宽一个L距离(L设定为10米)。
(3)判断目标的位置。将获取到的其他类点(例如建筑物等)投影到XOY坐标水平面上,将待判点向外延伸一条射线,通过射线与矩形的探测区域边缘的交点数的奇偶性,判断该点是否在矩形中。
(4)建立地物点虚拟网格。由其他类点的X坐标、Y坐标构成一个虚拟网格,由点云密度d求出网格的宽度w,并用下面的公式进行计算。n是指每一个网格所需要达到的平均点数,在这个应用中,n一般被设定为3,其他的分类点被顺序地加入相应的虚拟网格中。
![]() (1)
(1)
![]() (2)
(2)
(5)设定搜寻点缓冲。将虚拟格网中的最高点作为中心点,并将该地物中心点作为圆心,以安全距离为缓冲区半径,构建一个平行于XOY坐标面的缓冲区,然后判定出最佳模型匹配点的坐标。
3.2交叉跨越分析
为防止交叉传输线路跨越事故发生,对架空输电线路交叉跨越距离的测量十分重要。本文采用3D激光点云技术对输电线的跨接进行了研究,通过空间位置关系分析实现交跨物类型、交跨点坐标、交跨距离等关键信息提取,并形成交叉跨越分析报告,能有效辅助人员清晰获知线路交跨越情况,如图3所示。

图3交叉跨越地形线路情况
3.3大风模拟分析
在风力作用下,导线容易产生风偏,从而导致线路跳闸、断线等严重后果,而且这种风偏往往伴随着大风、雷雨等天气,运维人员准确定位和判断输电线存在的安全问题。当输电线上无冰覆盖时,作用于电线上的风压力载荷可通过(3)式进行计算。
![]() (3)
(3)
式中:![]() 为风压力载荷;C为风荷载系数;v为风速;d为导线直径;S为导线截面积;a为风速不均匀系数。
为风压力载荷;C为风荷载系数;v为风速;d为导线直径;S为导线截面积;a为风速不均匀系数。
运用分析软件,根据所建立的风偏量模型,对线路风偏量在强风的情况下,根据风向、最大风速进行模拟计算。
3.4杆塔倾斜分析
输电线路在采煤区、软土地区、坡地等特殊地区经过时,由于输电线路的倾斜和沉降等原因,使输杆塔发生倾斜。在进行输电线路塔架整体吊装时,由于吊点位置选择不当,也可能导致塔架变形。在人口密集区和重要交叉路口,塔身倾斜极易引起倒杆、电气安全距离偏短等问题,所以塔身倾斜的影响更是不容忽视。
利用3DLiDAR技术对铁塔倾角进行自动化检测,解决目前铁塔倾角检测技术中的工作强度大、受地形影响大等问题,并利用激光点云技术对铁塔倾角进行检测,从而解决铁塔倾角检测中的关键问题,如图4杆塔倾斜分析算法流程。
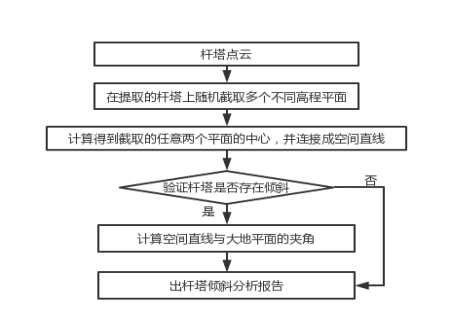
图4杆塔倾斜分析算法流程
4结论
通过本项目的研究,将对机载激光雷达用于电巡检查,实现对电网线路风险点的准确提取,并对其在实际巡检查中存在的问题进行了分析,能够有效地完成电网安全巡检工作。机载激光LiDAR与传统的电力巡检方式相比,对输电线路巡检时具有高精度的激光点云数据,更加便捷地获得和测量空间信息,进而使得数据的分析结果更精确,应用更广泛,提高了数据处理的自动化程度,进而降低了在数据处理过程中需要的大量人工操作,能更好地电力系统的建设和发展做贡献。
参考文献
[1]陈利明,张巍,于虹等.无人机载LiDAR系统在电力线巡检中的应用[J].测绘通报,2017(S1):176-178.DOI:10.13474/j.cnki.11-2246.2017.0646.
[2]李明明,秦宇翔,李志学.无人机在输电线路巡检中的应用及发展前景[J].电子制作,2014(21):61.DOI:10.16589/j.cnki.cn11-3571/tn.2014.21.025.
[3]尹磊,鲁贵文.机载激光雷达在电力线路设计中的应用[J].科技创新导报,2013(17):65-66.DOI:10.16660/j.cnki.1674-098x.2013.17.156.
[4]阮峻,陶雄俊,韦新科等.基于固定翼无人机激光雷达点云数据的输电线路三维建模与树障分析[J].南方能源建设,2019,6(01):114-118.DOI:10.16516/j.gedi.issn2095-8676.2019.01.020.
[5]陈驰,彭向阳,宋爽等.大型无人机电力巡检LiDAR点云安全距离诊断方法[J].电网技术,2017,41(08):2723-2730.DOI:10.13335/j.1000-3673.pst.2016.3194.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2025 期刊网(www.qikanchina.com) 琼ICP备2021005105号



