(广州地铁集团有限公司,广州)
摘要:随着城市轨道交通线网的不断扩展,巡检要求不断提升,人工巡检因人力、时间和环境限制,难以满足高效精准需求。因此,地铁轨道巡检图像智能分析系统的引入显得尤为必要。该系统基于地铁运行设备及环境特点,通过利用人工智能技术和图像分析算法,能够实现对地铁轨道的自动化、智能化巡检。进一步在某线路上进行了为期为3个月,运行6万公里以上的上线测试,测试结果显示该系统显著提高巡检效率和精度,能够确保城市轨道交通系统的安全运行。
关键词:人工智能;图像分析;轨道巡检;可行性研究
0 引言
轨道作为城市轨道交通系统中最为关键且规模最大的基础设施,其技术状况直接关乎到整个运营过程的安全性。随着地铁线路的建设与发展,线路检测设备已由静态检测发展到动态检测,由接触式检测发展到非接触式检测,由低速运行状态检测发展到高速运行状态检测[1]。在地铁线路大规模建设和开通运营的条件下,如何借助高效的检测手段,提前发现并准确评估各类轨道病害,进而及时采取措施,防止事故发生,对于确保城市轨道交通的安全运行至关重要,因此轨道交通智能巡检系统应运而生[2-6],然而,目前这类系统的应用尚不充分,其可行性和实际效果仍需进一步深入研究和验证。为了确保智能巡检系统能够在轨道交通领域发挥最大效用,需要对其可行性进行全面评估,以推动其在实际运营中的广泛应用。
因此,本文首先介绍了一种车载式轨道巡检图像自动分析系统,采用图像识别以及神经网络深度学习方法,自动智能采集识别轨道钢轨、扣件、道床等轨道部件病害数据。在此基础上对该系统进行了为期为3个月,运行6万公里以上的上线测试分析,对该系统的可行性进行研究。
1 技术方案
1.1总体技术方案
如图1所示,地铁轨道设备巡检图像智能分析系统主要由三大核心部分组成:车底图像采集与针对地铁运行的模式设计里程定位和传输模块,车内图像分析处理模块与终端操作模块。图像采集模块是系统的关键部分,成像效果直接关系到故障识别准确率;定位和传输模块是系统的重要功能,其精度直接关系到故障确认和处理及时性,图像处理模块中图像识别算法是系统的技术核心。终端操作平台由高性能服务器、高效的网络交换机、不间断电源以及便于操作的输入输出设备,共同确保数据的接收、存储、分析与展示工作得以顺利进行。
|
图1轨道设备巡检图像智能分析系统原理图 |
2 检测原理
2.1图像采集模块
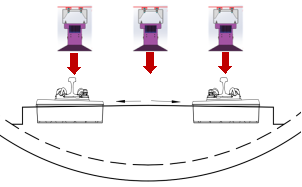
如图2所示,图像采集模块的核心功能在于利用安装于车辆底部的高速线阵相机,高效捕捉并尽可能精确地获取钢轨、轨枕、道床、道岔以及联接零件等关键铁路组件的真实、高清晰度且完整的灰度图像信息。该成像模块专为适应最高行车速度达120km/h的环境而设计,通过集成霍尔速度传感器实时获取的瞬时速度信号,动态调节并精确触发线阵相机的拍摄频率,确保其在0至120km/h的速度范围内均能稳定工作,且在进行图像拼接时能够维持图像的原始比例。
|
|
(a)线阵相机巡检模型 | (b)采集图像实例 |
图2 车底高速线阵相机工作原理示意图 | |
2.2 图像分析模块
图像分析模块基于神经网络与深度学习,实现软件主导、人工辅助的故障识别。它针对钢轨、轨枕等铁路关键部件,精确判断故障状态。通过持续深度学习,不断优化样本库,提升故障识别的精确度与可靠性。如图3所示,地铁轨道故障图片识别机制包括图像输入、分割、探测、特征描述及分类输出五环节。导入图像后,分割为钢轨、连接零件、轨枕、道岔和道床五部分,利用目标探测算法提取特征并与数据库比对,自动输出预警。
2.3 定位传输模块
定位传输模块的核心功能是精确确定报警信息的里程位置,同时向图像采集模块提供触发频率以记录瞬时速度,并实时将里程位置数据及图像报警信息传输至检修人员。
2.3.1 定位模块
地铁多数区段位于地下,GPS定位精度不足,因此采用霍尔速度传感器安装于车底转向架电机预留孔,通过记录齿轮箱转动齿数与固定传动比,计算列车实时速度和运行里程。传感器输出与高速A/D转换卡相连,计算频率并累加齿数,记录齿数与图片对应关系,实现路程与图片的匹配。速度与里程信息采集计算机将位置信息传至识别计算机,根据对应关系重命名图片,便于故障定位。
2.3.2 传输模块
故障信息通过FTP(File Transfer Protocol)进行传输,该协议属于TCP/IP协议组。本系统利用无线网络装置或地铁现有WIFI构建FTP系统,设定图片接收端为FTP服务器,而巡检图像分析系统的采集识别计算机作为客户端,实现数据的传输。
|
图3识别分析原理流程图 |
3 巡检系统上线应用情况
3.1 现场试验概况
运用该地铁轨道巡检图像智能分析系统,经电客车安装并在某地铁线路开展为期3个月,超6万公里的试验。系统每日在正线运营中巡检240km,无需占用正线天窗时间,验证系统的实际识别效果。
3.2 试验效果分析
选取某地地铁线路一特定区间故障情况进行试验,如图4所示,该系统实现了对钢轨表面擦伤、扣件异常状态以及轨道上异物等缺陷的自动化辨识。智能巡检系统成功识别并记录了轨道存在的多种病害。有力地验证了智能检测系统对于钢轨表面擦伤以及扣件异常病害等自动化分析能力。
同时对这一特定区间故障情况的巡检识别率进行验证,巡检结果的统计如下:轨枕裂纹真实故障为440处,自动识别报警420处,误判25处,识别率89.7%;轨面伤损真实故障为193处,自动识别报警193处,误判2处,识别率98.9%;弹条缺失真实故障为20处,自动识别报警18处,误判0处,识别率90.0%;整体识别率达92.5%。从巡检结果来看,初步试验达到的效果,不论是从故障识别率,还是巡检质量上看,都已体现出线性设备巡检方面优于传统人工步行巡道检查的优势,可见该系统可以在轨道线性设备养护维修中发挥重要作用已初见成效。
|
|
|
(a)轨枕裂缝 | (b)钢轨波磨掉块 | (c)弹条缺失 |
图4智能巡检系统检测轨道病害 | ||
4 结论
地铁轨道设备巡检图像智能分析系统采用了神经网络运算模型和深度学习的系统识别算法,系统的开发思路及采用的技术手段体现出了高效、经济的显著特点。该系统的研究开发,可以有效提高轨道巡检和地面检测数据分析处理能力。通过图像数据的采集、分析和报警功能,能合理配置人力资源,及时将故障数据提供给相应检修技术人员,进一步提高了对现场指导的准确性和实用性。该系统现在正在投入测试,目前故障识别速度、准确率、定位精度、传输速度等均满足技术需求,系统还可通过增加识别模块和量化故障判断等,实现系统功能的不断完善,达到项目预期目标,技术可行。
参考文献
[1]张斌. 城市轨道交通工务检测智行车的设计与实现[D]. 深圳大学, 2020.
[2]彭东亮. 一种新型车载式智能轨道状态巡检系统设计及工程应用[J]. 今日制造与升级, 2024(4):94-96.
[3]樊成栋. 基于机器视觉的地铁轨道障碍物检测系统设计[D]. 南京理工大学, 2022.
[4]郑英杰. 基于深度学习的地铁轨枕缺陷检测算法研究[D]. 西南交通大学, 2021.
[5]马臣希, 张二永, 方玥, 等. 车载轨道状态巡检技术发展及应用[J]. 中国铁路, 2017(10):91-95.
[6]倪海波. 车载式轨道巡检检测装置在城际铁路中的应用[J]. 轨道交通装备与技术, 2023(1):12-15, 19.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号